You might also like
- Connected and Automated Vehicles: Developing Policies, Designing Programs, and Deploying Projects: From Policy to PracticeFrom EverandConnected and Automated Vehicles: Developing Policies, Designing Programs, and Deploying Projects: From Policy to PracticeNo ratings yet
- Ai Autonomous Vehicles Paper Exp 1cDocument17 pagesAi Autonomous Vehicles Paper Exp 1cakshayaharitha8No ratings yet
- A CarsDocument3 pagesA CarsAdil Naseer KhawajaNo ratings yet
- Robotics HighwayDocument14 pagesRobotics HighwayManikandan RavichandranNo ratings yet
- Automated Highway SystemsDocument24 pagesAutomated Highway SystemsDilip MrNo ratings yet
- Automated HIGhway SYStem CPP ProjectDocument88 pagesAutomated HIGhway SYStem CPP ProjectDurvank ShethNo ratings yet
- Smart Traffic Management SystemDocument10 pagesSmart Traffic Management SystemGetachew BefekaduNo ratings yet
- Automated Highway SystemsDocument6 pagesAutomated Highway SystemsEinstein JeboneNo ratings yet
- Autonomous Car SimulationDocument8 pagesAutonomous Car SimulationPrayNo ratings yet
- Ivhs Part 1 v2Document6 pagesIvhs Part 1 v2Sarah MadiNo ratings yet
- Advanced Vehicle Technologies, Autonomous Vehicles and CyclingDocument15 pagesAdvanced Vehicle Technologies, Autonomous Vehicles and CyclingGiampaolo PastorinoNo ratings yet
- Public Policy Aging Report 2014 Reimer 27 31Document5 pagesPublic Policy Aging Report 2014 Reimer 27 31Sándor BányaiNo ratings yet
- AV Impacts on Transport: Benefits, but Widespread Effects Not Until 2040sDocument21 pagesAV Impacts on Transport: Benefits, but Widespread Effects Not Until 2040sjavomattNo ratings yet
- Autonomous Vehicles: Theoretical and Practical ChallengesDocument8 pagesAutonomous Vehicles: Theoretical and Practical ChallengesBasketbol PirataNo ratings yet
- AV Implementation Predictions: Implications for Transport PlanningDocument21 pagesAV Implementation Predictions: Implications for Transport PlanninghrishikeshNo ratings yet
- LiteratureReviewDocument5 pagesLiteratureReviewKhamraev AzamatNo ratings yet
- Admin, ID 3810 New FileDocument19 pagesAdmin, ID 3810 New FileRDNo ratings yet
- Lane Change Strategy For Autonomous VehicleDocument43 pagesLane Change Strategy For Autonomous VehicleSamir BachirNo ratings yet
- Autonomous Vehicle Implementation Predictions: Implications For Transport PlanningDocument19 pagesAutonomous Vehicle Implementation Predictions: Implications For Transport PlanningLethal11No ratings yet
- Autonomous Cars - Recent DevelopmentDocument7 pagesAutonomous Cars - Recent DevelopmentpittysNo ratings yet
- Automatic HighwayDocument25 pagesAutomatic Highwaystars of the nationNo ratings yet
- EvaluativepaperDocument3 pagesEvaluativepaperapi-351340106No ratings yet
- Heuristic Autonomous Intersection ManagementDocument9 pagesHeuristic Autonomous Intersection ManagementAditya Prakash ChouhanNo ratings yet
- VA Todd LitmanDocument23 pagesVA Todd LitmanSamuel MatiasNo ratings yet
- Smart Mobility Elective: Assignment 1Document5 pagesSmart Mobility Elective: Assignment 1Shubhi KushwahaNo ratings yet
- 18AUP109L-Project: Autonomous DriveDocument8 pages18AUP109L-Project: Autonomous DriveSatvik JohariNo ratings yet
- Automated Highway Systems StudyDocument5 pagesAutomated Highway Systems StudyAnzil AzimNo ratings yet
- Vehicle IntelligenceeDocument24 pagesVehicle IntelligenceePrathik AkkapallyNo ratings yet
- The Study On Automated Highway SystemsDocument5 pagesThe Study On Automated Highway SystemsDurvank ShethNo ratings yet
- Design Aspects and Challenges in Automated Highway SystemDocument10 pagesDesign Aspects and Challenges in Automated Highway SystemPiyush Sharma100% (1)
- Intelligent Transportation SystemDocument13 pagesIntelligent Transportation SystemRajasekhar KrishnapatnamNo ratings yet
- A Review Paper On Development of E-VehiclesDocument6 pagesA Review Paper On Development of E-VehiclesIJRASETPublicationsNo ratings yet
- A Vehicle Control System Using A Time Synchronized Hybrid VANET To Reduce Road Accidents Caused by Human ErrorDocument31 pagesA Vehicle Control System Using A Time Synchronized Hybrid VANET To Reduce Road Accidents Caused by Human ErrorAKASH HASMUKHBHAI SAVALIYA SVNITNo ratings yet
- Autonomous VehiclesDocument3 pagesAutonomous VehiclesAdnanNo ratings yet
- Automated Highway SystemDocument26 pagesAutomated Highway SystemSanjay Kumar86% (7)
- Obstacle Avoidance Path Design For Auton 1823a95eDocument19 pagesObstacle Avoidance Path Design For Auton 1823a95e7ossam AbduNo ratings yet
- Tanyaradzwa Mare Research Project Chapter1-5 2023Document14 pagesTanyaradzwa Mare Research Project Chapter1-5 2023tapiwamuchenje123No ratings yet
- Autonomous Vehicles RRLDocument8 pagesAutonomous Vehicles RRLDominique LopenaNo ratings yet
- Autonomous Vehicle Will Not Make These Mistakes.Document12 pagesAutonomous Vehicle Will Not Make These Mistakes.Jern LoewNo ratings yet
- Aguila JImenez Mario ProjectoDocument18 pagesAguila JImenez Mario ProjectoMARIO ANTONIO AGUILA JIMENEZNo ratings yet
- Autonomous CarDocument2 pagesAutonomous CarUzair AhmadNo ratings yet
- AvipDocument23 pagesAvipAnonymous 0RxchcrqBNo ratings yet
- Intelligence Traffic Control SystemDocument24 pagesIntelligence Traffic Control Systemsuliat ikudaisiNo ratings yet
- Saint Louis University School of Engineering and Architecture Department of Electrical EngineeringDocument12 pagesSaint Louis University School of Engineering and Architecture Department of Electrical EngineeringMr. WftyNo ratings yet
- Mirko Gojic - Research ProposalDocument3 pagesMirko Gojic - Research Proposalonly1srbNo ratings yet
- Policy Implications of Autonomous VehiclesDocument16 pagesPolicy Implications of Autonomous VehiclesCato InstituteNo ratings yet
- IEEE PapersDocument3 pagesIEEE PaperssyedaNo ratings yet
- Autonomous Cars Using Embedded Systems & Spherical WheelsDocument5 pagesAutonomous Cars Using Embedded Systems & Spherical WheelsDionisie LefterNo ratings yet
- Automated Highway ReportDocument3 pagesAutomated Highway ReportPrathmesh DeshpandeNo ratings yet
- Self-Driving Cars: An Analysis of Benefits, Risks, and Ethical ConsiderationsDocument13 pagesSelf-Driving Cars: An Analysis of Benefits, Risks, and Ethical ConsiderationsGavin GrecsekNo ratings yet
- Traffic Light Control OptimizationDocument24 pagesTraffic Light Control OptimizationAli AsgerovNo ratings yet
- Automated Highways System2Document5 pagesAutomated Highways System2Shubham MohiteNo ratings yet
- TRB'14 ApplicationAutonomousDrivingTechnologytoTransit LutinKornhauserDocument39 pagesTRB'14 ApplicationAutonomousDrivingTechnologytoTransit LutinKornhauserwoodNo ratings yet
- SwethaS EthicsInAIDocument2 pagesSwethaS EthicsInAISswetha SaraNo ratings yet
- Autonomous Vehicles: The Future of TransportationDocument22 pagesAutonomous Vehicles: The Future of TransportationSuprithaNo ratings yet
- Automated Highway SystemDocument5 pagesAutomated Highway SystemLavanth DynoNo ratings yet
- ITS in India: Benefits and Applications of Intelligent Transportation SystemsDocument23 pagesITS in India: Benefits and Applications of Intelligent Transportation Systemspraveenpv70% (1)
- Autonomous VehiclesDocument2 pagesAutonomous VehiclesKhaled Ibrahim AlHamouriNo ratings yet
- Automated HighwaysDocument5 pagesAutomated HighwaysShubham MohiteNo ratings yet
- Smoke Detector CircuitDocument1 pageSmoke Detector CircuitBhushan NikumbhNo ratings yet
- Application For The Job of System EngineerDocument1 pageApplication For The Job of System EngineerBhushan Nikumbh100% (1)
- Letter of Recommendation: Prof. A. M. PatilDocument1 pageLetter of Recommendation: Prof. A. M. PatilBhushan NikumbhNo ratings yet
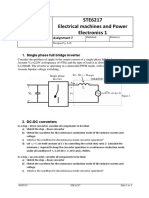
- Power Electronics and Electrical Drives 1: Exercise 1 (Chapter 5)Document2 pagesPower Electronics and Electrical Drives 1: Exercise 1 (Chapter 5)Bhushan NikumbhNo ratings yet
- Assignment 7Document1 pageAssignment 7Bhushan NikumbhNo ratings yet
- Ranking of PMUDocument17 pagesRanking of PMUBhushan NikumbhNo ratings yet
- Cable Bridge Conveyor - New Suspension Bridge Based Conveyor SystemDocument4 pagesCable Bridge Conveyor - New Suspension Bridge Based Conveyor SystemCable Bridge ConveyorNo ratings yet
- SR-71 Blackbird Rocket PlansDocument8 pagesSR-71 Blackbird Rocket PlansAviation/Space History LibraryNo ratings yet
- Warren - Eastlink Super T BridgesDocument23 pagesWarren - Eastlink Super T Bridges4493464No ratings yet
- Advantages of Metal CastingDocument6 pagesAdvantages of Metal CastingHarshGuptaNo ratings yet
- Classification of Building OccupanciesDocument24 pagesClassification of Building OccupanciesMelanie67% (3)
- Tank ErectionDocument13 pagesTank Erectionsajay2010No ratings yet
- Solutions Chapter14Document10 pagesSolutions Chapter14Ali Rehman100% (8)
- 08 Me 2014Document27 pages08 Me 2014WAPPNo ratings yet
- Oil & Gas Pipeline - 1 PDFDocument21 pagesOil & Gas Pipeline - 1 PDFAshif IqubalNo ratings yet
- Skype Id: Anwar - Shaikh1: Curriculum VitaeDocument8 pagesSkype Id: Anwar - Shaikh1: Curriculum VitaeAnwar hussainNo ratings yet
- Airbus A3XX Development Plan/TITLEDocument31 pagesAirbus A3XX Development Plan/TITLEHarsh AgrawalNo ratings yet
- Vehicle Hoist Safe Work ProcedureDocument2 pagesVehicle Hoist Safe Work ProcedureWiwinIndahSariEffendiNo ratings yet
- Guia para El Extranjero en La CD de Mexico 1903Document408 pagesGuia para El Extranjero en La CD de Mexico 1903fco_soria100% (1)
- Cooling CurvesDocument7 pagesCooling CurvesAvinash RampariyaNo ratings yet
- C7&C9 - Notes - S12Document64 pagesC7&C9 - Notes - S12Kareem RadwanNo ratings yet
- Ficha Tecnica - Microseal - DSDocument2 pagesFicha Tecnica - Microseal - DSedocducNo ratings yet
- Steel vs. Concrete MaterialDocument3 pagesSteel vs. Concrete MaterialGerald YasonNo ratings yet
- Sport Aviation Abr-1975Document92 pagesSport Aviation Abr-1975laerciofilho100% (1)
- CHAPTER 7 Freight RatesDocument11 pagesCHAPTER 7 Freight Ratesshaji100% (1)
- Updated SP-511Document7 pagesUpdated SP-511Feroz GullNo ratings yet
- Bethel Corridor PlanDocument78 pagesBethel Corridor PlanChris HenryNo ratings yet
- TDC PP742 F2Document3 pagesTDC PP742 F2Arjun PrajapatiNo ratings yet
- Spotface: Machined Faced Cast Forged Roughness Flatness Tolerances Counterbore BossDocument2 pagesSpotface: Machined Faced Cast Forged Roughness Flatness Tolerances Counterbore Bossmamasita25No ratings yet
- Peter TrautmannDocument51 pagesPeter TrautmannAmellliaNo ratings yet
- Lease TypesDocument1 pageLease TypesSatish RaiNo ratings yet
- Alphabetical List of Pharma CompaniesDocument4 pagesAlphabetical List of Pharma Companiesvipinbhai100% (1)
- Gen 26883 A FMDB02 2012 PDFDocument653 pagesGen 26883 A FMDB02 2012 PDFgrimaguil100% (1)
- Significant Small Ships 2009Document68 pagesSignificant Small Ships 2009nf_azevedo75% (4)
- Procedure For Welding of PipingDocument16 pagesProcedure For Welding of PipingJohnson Raju100% (1)
- Sheet Metal OperationsDocument63 pagesSheet Metal OperationsDilip ShenoyNo ratings yet