You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- DS06170953 000 enDocument482 pagesDS06170953 000 enWiteyElCaballeroOscuroNo ratings yet
- Application of Submarine Cables For Telecommunication in Nigeria 2Document8 pagesApplication of Submarine Cables For Telecommunication in Nigeria 2Taiwo OdumosuNo ratings yet
- Key CalculatorDocument7 pagesKey CalculatorChristina MullinsNo ratings yet
- Q3 ReportDocument38 pagesQ3 ReportAmossy ItozyaNo ratings yet
- Power Outage ReportDocument39 pagesPower Outage ReportmateenNo ratings yet
- SE8300 User Interface Guide: Commercial and Hotel/Lodging HVAC Fan Coil ApplicationsDocument50 pagesSE8300 User Interface Guide: Commercial and Hotel/Lodging HVAC Fan Coil ApplicationsInflation EngineeringNo ratings yet
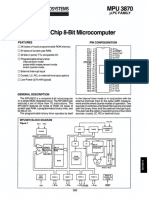
- Standard Microsystems Corporation: Features Pin ConfigurationDocument8 pagesStandard Microsystems Corporation: Features Pin ConfigurationВячеслав НебесныйNo ratings yet
- Module 1 Lesson 1 Laplace TransformDocument13 pagesModule 1 Lesson 1 Laplace TransformVictor DoyoganNo ratings yet
- OM8373 78 N3 v1.0 PDFDocument108 pagesOM8373 78 N3 v1.0 PDFJulio Alberto Cabrera Rodriguez100% (1)
- Distributed Power Wireless Control System (DPWCS)Document56 pagesDistributed Power Wireless Control System (DPWCS)Tushar Shivprasad DiwewarNo ratings yet
- Experiment 05Document6 pagesExperiment 05ZodkingNo ratings yet
- Vector SynthesisDocument19 pagesVector SynthesisGiorgio Magnanensi100% (1)
- Nse 3 PDFDocument3 pagesNse 3 PDFAsif RiazNo ratings yet
- Pub059-020-00 - 0100 (Pakscan Integral FCU (Field Control Unit) Technical Manual) PDFDocument34 pagesPub059-020-00 - 0100 (Pakscan Integral FCU (Field Control Unit) Technical Manual) PDFapisituNo ratings yet
- 131b0176 DGDocument279 pages131b0176 DGArief ReesaNo ratings yet
- Book List For EEE Job PreparationDocument5 pagesBook List For EEE Job PreparationTanvir Alam Shishir100% (1)
- E1 Pin AssignmentDocument4 pagesE1 Pin Assignmentihab_abdullahNo ratings yet
- Data Benchmarking: (RF) Connection Accessibility Task RetainabilityDocument2 pagesData Benchmarking: (RF) Connection Accessibility Task RetainabilityBonar SianiparNo ratings yet
- Practical Work Report 1Document6 pagesPractical Work Report 1KimZhiMie100% (1)
- An4499 Stm32 Nrf51822 Bluetooth Low Energy System Solution StmicroelectronicsDocument44 pagesAn4499 Stm32 Nrf51822 Bluetooth Low Energy System Solution Stmicroelectronicsjkdas12No ratings yet
- Yamaha 01V ManualDocument303 pagesYamaha 01V ManualHannanjah van GerrevinkNo ratings yet
- New Pin Wiring DiagramDocument8 pagesNew Pin Wiring DiagramGervie Rabadon PilapilNo ratings yet
- STTA 3006PI Diode STDocument10 pagesSTTA 3006PI Diode STFunda HandasNo ratings yet
- Activities On AC Motors in 2007Document22 pagesActivities On AC Motors in 2007CarlosNo ratings yet
- Manual InstalacionDocument18 pagesManual Instalacionmguardia892No ratings yet
- SBC Ru 110: Universal Remote ControlDocument44 pagesSBC Ru 110: Universal Remote ControlVictor LiraNo ratings yet
- Electrom-iTIG II BrochureDocument6 pagesElectrom-iTIG II Brochureorcbane27No ratings yet
- VectaStar PMPDocument236 pagesVectaStar PMPevashihminaNo ratings yet
- 590G-V2 in A4 CatalogueDocument6 pages590G-V2 in A4 CatalogueMATIAS_CNo ratings yet
- SR302 - SR306: Not Recommended For New Designs, Use Sb3X0 SeriesDocument2 pagesSR302 - SR306: Not Recommended For New Designs, Use Sb3X0 SeriesPaulo Roberto s freireNo ratings yet