You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Solution Manual Hcs12 Microcontrollers and Embedded Systems 1st Edition Ali MazidiDocument14 pagesSolution Manual Hcs12 Microcontrollers and Embedded Systems 1st Edition Ali MazidiSabithkk20070% (1)
- Monitor and Control of Greenhouse Environment (Automated Green House) Final DocumentationDocument99 pagesMonitor and Control of Greenhouse Environment (Automated Green House) Final DocumentationQaisar Nadeem70% (10)
- Self Study 1Document4 pagesSelf Study 1Shivam ShuklaNo ratings yet
- Ee16408 Mca Vith SemDocument5 pagesEe16408 Mca Vith SemharshalNo ratings yet
- 8051 PDFDocument118 pages8051 PDFShripal shahNo ratings yet
- MicroprocessorDocument2 pagesMicroprocessorriyazmothiNo ratings yet
- Core8051s HBDocument64 pagesCore8051s HBSiddhasen PatilNo ratings yet
- Introduction To 8051 ProgrammingDocument24 pagesIntroduction To 8051 Programmingveeramaniks408No ratings yet
- GSM Based Home Security SystemDocument7 pagesGSM Based Home Security Systemsabareeshnath007No ratings yet
- Micro Controllers ECE-310 FinalDocument10 pagesMicro Controllers ECE-310 Finalramjee26No ratings yet
- Fake Currency Tester and Counter Project ReportDocument44 pagesFake Currency Tester and Counter Project ReportGagan Maggo100% (2)
- Comparison of MicrocontrollerDocument5 pagesComparison of MicrocontrollerGitesh MisalNo ratings yet
- B.E - Eee Ug Syllabus 13.12.2017 PDFDocument107 pagesB.E - Eee Ug Syllabus 13.12.2017 PDFManikandan PNo ratings yet
- Microprocessors & Microcontrollers: Part A 1. What Is Microprocessor?Document21 pagesMicroprocessors & Microcontrollers: Part A 1. What Is Microprocessor?Nenu Meeku TelusaNo ratings yet
- Electrical EnggDocument52 pagesElectrical Enggveeru_virenderNo ratings yet
- T.Y. EJ6G Embedded System Lectures Notes Chapter - 1Document34 pagesT.Y. EJ6G Embedded System Lectures Notes Chapter - 1abhijit_jamdadeNo ratings yet
- Advanced Microprocessors & Microcontrollers: B.E. (Computer Engineering) Seventh Semester (C.B.S.)Document2 pagesAdvanced Microprocessors & Microcontrollers: B.E. (Computer Engineering) Seventh Semester (C.B.S.)Spark SparkNo ratings yet
- Microcontroller Chapter1Document13 pagesMicrocontroller Chapter1Neelam KapoorNo ratings yet
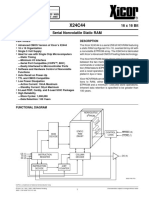
- X24C44 256 Bit 16 X 16 Bit: Features DescriptionDocument16 pagesX24C44 256 Bit 16 X 16 Bit: Features DescriptionMarinaBogaoNo ratings yet
- Accurate Room Temperature by Controlling Cooling DeviceDocument75 pagesAccurate Room Temperature by Controlling Cooling DeviceSiddarthaBathiniNo ratings yet
- Automatic Car Parking System: A Mini Project Report Submitted byDocument24 pagesAutomatic Car Parking System: A Mini Project Report Submitted bythasarathanr1993_939No ratings yet
- Arm7 ArchitectureDocument20 pagesArm7 ArchitectureCharitha CherryNo ratings yet
- VTU Important SyllabusDocument115 pagesVTU Important SyllabusDan HawkNo ratings yet
- Fdocuments - in - The 8051 Microcontroller Based Embedded Systems 5618177131d40 PDFDocument45 pagesFdocuments - in - The 8051 Microcontroller Based Embedded Systems 5618177131d40 PDFManinder SinghNo ratings yet
- 8051-CH9-TimePmg in Assem & CDocument101 pages8051-CH9-TimePmg in Assem & CshivaspyNo ratings yet
- MCES Unit 2 3Document7 pagesMCES Unit 2 3dup acountNo ratings yet
- ECX4236 TMA123 2014 A4 eDocument10 pagesECX4236 TMA123 2014 A4 eLackith Chandimal HettiarachchiNo ratings yet
- 8051 Assembly Language ProgrammingDocument51 pages8051 Assembly Language ProgrammingVishal Gudla NagrajNo ratings yet
- Embedded Systems: (Software)Document60 pagesEmbedded Systems: (Software)Ankit JhaNo ratings yet
- Ec2304 LP III EceDocument5 pagesEc2304 LP III EcesunvenkatNo ratings yet