You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Application Note 98: VFP Support CodeDocument27 pagesApplication Note 98: VFP Support CodenfwuNo ratings yet
- RTK1 Supplement (Newly Approved General-Use Kanji)Document27 pagesRTK1 Supplement (Newly Approved General-Use Kanji)nfwuNo ratings yet
- Nebulosity User ManualDocument87 pagesNebulosity User ManualManduCerianoNo ratings yet
- OakDSPCore Embedded Digital Signal Processing CoreDocument10 pagesOakDSPCore Embedded Digital Signal Processing CorenfwuNo ratings yet
- Efficient Algorithms For Supersingular Isogeny Diffie-HellmanDocument34 pagesEfficient Algorithms For Supersingular Isogeny Diffie-HellmannfwuNo ratings yet
- You've Worked in A Lab Too Long WhenDocument1 pageYou've Worked in A Lab Too Long WhennfwuNo ratings yet
- Diagram Showing The Order of Cells in A SquiralDocument8 pagesDiagram Showing The Order of Cells in A SquiralnfwuNo ratings yet
- Fast Scalar Multiplication On Elliptic Curves - Tanja LangeDocument48 pagesFast Scalar Multiplication On Elliptic Curves - Tanja LangenfwuNo ratings yet
- Efficient Algorithms For Supersingular Isogeny Diffie-HellmanDocument34 pagesEfficient Algorithms For Supersingular Isogeny Diffie-HellmannfwuNo ratings yet
- A Tutorial Implementation of A Dependently Typed Lambda CalculusDocument32 pagesA Tutorial Implementation of A Dependently Typed Lambda CalculusnfwuNo ratings yet
- Simple Type Inference For Higher-Order Stack-Oriented LanguagesDocument12 pagesSimple Type Inference For Higher-Order Stack-Oriented LanguagesnfwuNo ratings yet
- On Disk Format 0822Document55 pagesOn Disk Format 0822spiegela3599No ratings yet
- TeX by Topic - Victor EijkhoutDocument287 pagesTeX by Topic - Victor EijkhoutnfwuNo ratings yet
- Programming Paradigms For Dummies: What Every Programmer Should KnowDocument39 pagesProgramming Paradigms For Dummies: What Every Programmer Should Knowakj504100% (1)
- Growing A Language - Guy L. Steele Jr.Document16 pagesGrowing A Language - Guy L. Steele Jr.nfwuNo ratings yet
- Ocelot Installation ManualDocument10 pagesOcelot Installation ManualnfwuNo ratings yet
- IET Useful LinksDocument3 pagesIET Useful LinksnfwuNo ratings yet
- Unit3 Images&GraphicsDocument23 pagesUnit3 Images&GraphicsNec'x RoseteNo ratings yet
- CAD/CAM/CAE IntroductionDocument101 pagesCAD/CAM/CAE IntroductionSatyaprakash Dinesh VisputeNo ratings yet
- Thematic Map - Wikipedia, The Free EncyclopediaDocument5 pagesThematic Map - Wikipedia, The Free EncyclopediaAnthony AngelesNo ratings yet
- DIP 17EC72 18EC733assigment1Document1 pageDIP 17EC72 18EC733assigment1NagarajNo ratings yet
- 3D File FormatsDocument3 pages3D File FormatsNoel NgNo ratings yet
- Latihan Soal BlankDocument8 pagesLatihan Soal BlankDanbooNo ratings yet
- SyllabusDocument2 pagesSyllabuscap2010No ratings yet
- Tooth Shade Dxetermination: Dr. Borbély JuditDocument46 pagesTooth Shade Dxetermination: Dr. Borbély JuditMariam MohamedNo ratings yet
- Test Unit 1 and Unit 2Document4 pagesTest Unit 1 and Unit 2bebeulemNo ratings yet
- Portra 400 Film Emulation GuideDocument5 pagesPortra 400 Film Emulation GuidemarNo ratings yet
- MCA Computer Graphics ReportDocument15 pagesMCA Computer Graphics ReportRaj VermaNo ratings yet
- Chapter 1 Introduction To Multimedia and Building BlocksDocument47 pagesChapter 1 Introduction To Multimedia and Building BlocksAjay MandalNo ratings yet
- DYP Sys InfoDocument16 pagesDYP Sys InfoVinoth RockerNo ratings yet
- Vron StageDocument6 pagesVron StagehamidrezaNo ratings yet
- Keyboard Shortcuts For Adobe Photoshop: Activity Shortcut KeyDocument3 pagesKeyboard Shortcuts For Adobe Photoshop: Activity Shortcut Keymuhammadumar412296No ratings yet
- List of 3D Modeling SoftwareDocument5 pagesList of 3D Modeling SoftwareJiyad KhanNo ratings yet
- Agisoft Photogrammetry Broch 7010 2194 Revb TF SMDocument4 pagesAgisoft Photogrammetry Broch 7010 2194 Revb TF SMDavid MalleaNo ratings yet
- Lession-1 AGK App Game Kit PDFDocument5 pagesLession-1 AGK App Game Kit PDFchetandasamNo ratings yet
- Discovering Bryce 5 TerrainsDocument7 pagesDiscovering Bryce 5 TerrainsMarcos Germano DegenhardtNo ratings yet
- Rolen ResumeDocument2 pagesRolen Resumeapi-225165143No ratings yet
- Color Space Conversion For The Laser Film Recorder Using 3-D LUTDocument8 pagesColor Space Conversion For The Laser Film Recorder Using 3-D LUT程杰No ratings yet
- Gmax Tutorial - A Simple Diesel Loco, Part TwoDocument24 pagesGmax Tutorial - A Simple Diesel Loco, Part TwoCeren ErgulNo ratings yet
- Grade 11 Ict Chapter 4 NotesDocument4 pagesGrade 11 Ict Chapter 4 NotesMohammadNajath100% (2)
- Computer Graphics and Multimedia - Applications,.Problems - And.solutions (IDEA GROUP)Document283 pagesComputer Graphics and Multimedia - Applications,.Problems - And.solutions (IDEA GROUP)Saurav MaheshkarNo ratings yet
- Beginning Photoshop 7Document5 pagesBeginning Photoshop 7general2000No ratings yet
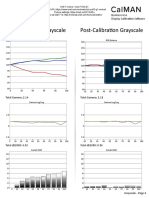
- Vizio PX65-G1 CNET Review Calibration ResultsDocument3 pagesVizio PX65-G1 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- Nouveau Document TexteDocument4 pagesNouveau Document TexteMounir SelmiNo ratings yet
- LAB MANUAL COMPUTER GRAPHICSDocument61 pagesLAB MANUAL COMPUTER GRAPHICSsatyam gargNo ratings yet
- Openfiledialog: " " "Bitmap Files ( .BMP) - .BMP - Jpeg Files ( .JPG) - .JPG - All Valid Files ( .BMP/ .JPG) - .BMP/ .JPG"Document7 pagesOpenfiledialog: " " "Bitmap Files ( .BMP) - .BMP - Jpeg Files ( .JPG) - .JPG - All Valid Files ( .BMP/ .JPG) - .BMP/ .JPG"Andrew TejahusadaNo ratings yet