You might also like
- Exact simulation method for one-dimensional diffusionsDocument16 pagesExact simulation method for one-dimensional diffusionselintelectual05No ratings yet
- Processes Discrete Time GeissDocument99 pagesProcesses Discrete Time Geisselintelectual05No ratings yet
- SummaryDocument2 pagesSummaryelintelectual05No ratings yet
- Differential Equations and Dynamical Systems Lawrence PerkoDocument571 pagesDifferential Equations and Dynamical Systems Lawrence PerkoVishnuKumarMeenaNo ratings yet
- 1 ARCH Model 80 PagesDocument80 pages1 ARCH Model 80 PagesPuPu Shing ShingNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Physics MCQs Question BankDocument613 pagesPhysics MCQs Question BankNotes Notes100% (1)
- Practice Sheet NLMDocument65 pagesPractice Sheet NLMAnshul Tiwari100% (1)
- PC1431 Assignment 2 AnswersDocument19 pagesPC1431 Assignment 2 AnswersMikael Lee0% (3)
- FREE ENERGY and Anti GravityDocument48 pagesFREE ENERGY and Anti GravityDilJalaay100% (2)
- Suction-Ejection of A Ping-Pong Ball in A Falling Water-Filled Cup. A. Barlet, N. MalhommeDocument5 pagesSuction-Ejection of A Ping-Pong Ball in A Falling Water-Filled Cup. A. Barlet, N. Malhomme이온유No ratings yet
- Astronomy Lesson PlanDocument5 pagesAstronomy Lesson PlanWilliam BaileyNo ratings yet
- Lab: Graph Matching Using Logger Pro: BackgroundDocument4 pagesLab: Graph Matching Using Logger Pro: BackgroundK BNo ratings yet
- Metric Units, Vectors, Kinematics Word ProblemsDocument16 pagesMetric Units, Vectors, Kinematics Word ProblemsAlexa Marsh50% (2)
- PHGN100 EquationSheetDocument1 pagePHGN100 EquationSheetSamuel BangapadangNo ratings yet
- OneDimensionalMotionSimulationActivity - EstradaCE12S16Document6 pagesOneDimensionalMotionSimulationActivity - EstradaCE12S16Jerilou EstradaNo ratings yet
- FTRE Sample Paper Class 9th Paper 2Document26 pagesFTRE Sample Paper Class 9th Paper 2Akash100% (1)
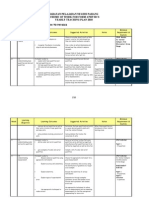
- Physics Form 4 Yearly Lesson Plan 2010Document26 pagesPhysics Form 4 Yearly Lesson Plan 2010Mohd Khairul AnuarNo ratings yet
- MOTIONDocument6 pagesMOTIONAnthropophobe NyctophileNo ratings yet
- IIT JEE Maths Practice Problems for Daily TargetDocument9 pagesIIT JEE Maths Practice Problems for Daily TargetPankaj ThakurNo ratings yet
- You Might Need To Solve Some of These On Separate Sheet of PaperDocument2 pagesYou Might Need To Solve Some of These On Separate Sheet of PaperVedant PatnaikNo ratings yet
- General Education: Biological Science and Physical ScienceDocument248 pagesGeneral Education: Biological Science and Physical Sciencedennis balbuenaNo ratings yet
- Physics Question BankDocument209 pagesPhysics Question BankRoberto De La Paz93% (15)
- HES5310 Machine Dynamics 2, Semester 1, 2012, Assignment 2Document57 pagesHES5310 Machine Dynamics 2, Semester 1, 2012, Assignment 2StephenPYBong100% (1)
- Science Department 8 First First 1 Physics: I. ObjectivesDocument10 pagesScience Department 8 First First 1 Physics: I. ObjectivesAllister Lee Gaerlan CruzNo ratings yet
- Oxfordaqa Advance Info 9660 International A Level Mathematics May June 2022v2Document13 pagesOxfordaqa Advance Info 9660 International A Level Mathematics May June 2022v2Pragna AnanthNo ratings yet
- 1.circular Motion PDFDocument13 pages1.circular Motion PDFKundan ChoudharyNo ratings yet
- AIATS Practise TestDocument20 pagesAIATS Practise TestVishu BansalNo ratings yet
- s71200&v90 PDFDocument95 pagess71200&v90 PDFMohamed BOULARESNo ratings yet
- Objectives:: Uniformly Accelerated MotionDocument7 pagesObjectives:: Uniformly Accelerated MotionClarisse Palma100% (2)
- Las Science 9 Melc 1 q4 Week-1Document4 pagesLas Science 9 Melc 1 q4 Week-1ROVELYN FURATERONo ratings yet
- The Warp Drive and AntigravityDocument6 pagesThe Warp Drive and AntigravityPeter Morris-HindNo ratings yet
- Analysis and Optimization of A Crash Worthy Helicopter SeatsDocument88 pagesAnalysis and Optimization of A Crash Worthy Helicopter SeatsThomas WilcoxNo ratings yet
- Fisika Teknik Bab 3 PDFDocument32 pagesFisika Teknik Bab 3 PDFkikikNo ratings yet
- GEOPHYSICS TWO MARKSDocument9 pagesGEOPHYSICS TWO MARKSArunodhaya NNo ratings yet