You might also like
- G104 - Guide For Estimation of Measurement Uncertainty in Testing (2014)Document31 pagesG104 - Guide For Estimation of Measurement Uncertainty in Testing (2014)Vallik TadNo ratings yet
- Uncertainty Budget TemplateDocument4 pagesUncertainty Budget TemplatedonkalonkNo ratings yet
- Uncertainty in Thermometer CalibrationDocument6 pagesUncertainty in Thermometer CalibrationJoel Villasanta DeocaresNo ratings yet
- Uncertainty MeasurementsDocument7 pagesUncertainty MeasurementsŇuman ÅliNo ratings yet
- Measurement UncertaintyDocument48 pagesMeasurement Uncertaintycsmanien100% (1)
- Chap4.2 Lecture Method ValidationDocument53 pagesChap4.2 Lecture Method ValidationLily ERc Peter100% (1)
- Handbook of Weighting Applications PDFDocument32 pagesHandbook of Weighting Applications PDFiptNo ratings yet
- Technical Report Measurement Uncertainty 2007Document62 pagesTechnical Report Measurement Uncertainty 2007yousaf_zai_khan81995No ratings yet
- Measurement UncertaintyDocument10 pagesMeasurement UncertaintySajal MahmudNo ratings yet
- LAB 48 Decision Rules and Statements of ConformityDocument47 pagesLAB 48 Decision Rules and Statements of ConformityNirja ParmarNo ratings yet
- Estimating Measurement-Uncertainty - in Quantitative Chemical AnalysisDocument18 pagesEstimating Measurement-Uncertainty - in Quantitative Chemical AnalysisMohammad Youssefi100% (2)
- 7 Steps To Calculate Measurement Uncertainty - IsobudgetsDocument17 pages7 Steps To Calculate Measurement Uncertainty - IsobudgetsJGlobex100% (1)
- 5 - Decision Rule Associated To The Measurement UncertaintyDocument38 pages5 - Decision Rule Associated To The Measurement UncertaintyMoldoveanu AlionaNo ratings yet
- Steps To Evaluating Measurement UncertaintyDocument14 pagesSteps To Evaluating Measurement UncertaintyAjit K GNo ratings yet
- Uncertainty'2014Document38 pagesUncertainty'2014zilangamba_s4535No ratings yet
- Conformity Assessment of Temperature Measuring Devices Used in Forensic Science Laboratories Under Iso/iec 17025: 2017Document9 pagesConformity Assessment of Temperature Measuring Devices Used in Forensic Science Laboratories Under Iso/iec 17025: 2017IJAR JOURNALNo ratings yet
- Calibration uncertainty guide for non-expertsDocument7 pagesCalibration uncertainty guide for non-expertsmagtrolNo ratings yet
- Water Quality. Sampling. Guidance On Quality Assurance and Quality Control of Environmental Water Sampling and Handling - Libgen - LiDocument46 pagesWater Quality. Sampling. Guidance On Quality Assurance and Quality Control of Environmental Water Sampling and Handling - Libgen - Lilouis bothe100% (1)
- Measurement UncertaintyDocument10 pagesMeasurement UncertaintyRoyal BimhahNo ratings yet
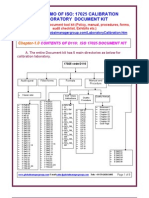
- ISO 17025 Calibration Laboratory Document Kit PDFDocument9 pagesISO 17025 Calibration Laboratory Document Kit PDFjpenjerry100% (1)
- Whitepaper: When Recognition MattersDocument10 pagesWhitepaper: When Recognition MattersLuân Nguyễn QuỳnhNo ratings yet
- Anallytica Methodd VaalidaationDocument65 pagesAnallytica Methodd Vaalidaationvaishali patelNo ratings yet
- Calibration ISO IEC 17025 Application DocumentDocument60 pagesCalibration ISO IEC 17025 Application DocumentHandayani Dhiniyati Dhini100% (1)
- Measurement Uncertainty StrategiesDocument3 pagesMeasurement Uncertainty Strategiesjrlr65No ratings yet
- Measurement Uncertainty ChemicalDocument8 pagesMeasurement Uncertainty ChemicalGanesh KashinathNo ratings yet
- Type A and B Uncertainty Analysis ASTM E74 1Document13 pagesType A and B Uncertainty Analysis ASTM E74 1Anonymous rYZyQQot55No ratings yet
- DKD R 6 2 t5 e PDFDocument9 pagesDKD R 6 2 t5 e PDFDragan IlicNo ratings yet
- Technical Requirement For ISO 17025-2005-SanasDocument11 pagesTechnical Requirement For ISO 17025-2005-Sanasyouni_2005No ratings yet
- Measurement and UncertaintyDocument12 pagesMeasurement and UncertaintyTiến Dũng100% (1)
- Quality Manual CalibrationDocument30 pagesQuality Manual CalibrationsaidvaretNo ratings yet
- Calibrate Metal Tapes Using Standard Tape MethodDocument12 pagesCalibrate Metal Tapes Using Standard Tape Methodhaharamesh100% (1)
- SOP Pipettes AESOP13640-08 052013 en Online PDFDocument0 pagesSOP Pipettes AESOP13640-08 052013 en Online PDFPutriErvinaNo ratings yet
- Euramet Calibration Guide No18Document120 pagesEuramet Calibration Guide No18Jesika Andilia Setya WardaniNo ratings yet
- DKD R 5 7 PDFDocument31 pagesDKD R 5 7 PDFcal lanNo ratings yet
- 7 Steps To Calculate Measurement Uncertainty by Rick Hogan 2019Document14 pages7 Steps To Calculate Measurement Uncertainty by Rick Hogan 2019Musab Mohammed100% (1)
- Calibration TerminologyDocument15 pagesCalibration TerminologyDavid GaryNo ratings yet
- Astm d4448-01 Standard Guide For Sampling Ground Water Monitoring WellsDocument343 pagesAstm d4448-01 Standard Guide For Sampling Ground Water Monitoring WellsEdson MoscosoNo ratings yet
- Thermometer Calibration Guide PDFDocument8 pagesThermometer Calibration Guide PDFteknisi primaNo ratings yet
- Uncertainty Budget TemplateDocument4 pagesUncertainty Budget TemplateshahazadNo ratings yet
- Quality Manual HETL FCS 17025 2017Document108 pagesQuality Manual HETL FCS 17025 2017Mohamed azarudeenNo ratings yet
- How To Combine Measurement Uncertainty With Different Units of Measure by Rick Hogan PDFDocument14 pagesHow To Combine Measurement Uncertainty With Different Units of Measure by Rick Hogan PDFehab MichaelNo ratings yet
- Metrology Terminology Calibration Verification ValidationDocument2 pagesMetrology Terminology Calibration Verification ValidationQuality controllerNo ratings yet
- Uncertainty 2Document2 pagesUncertainty 2maniNo ratings yet
- Uncertainty FormatDocument6 pagesUncertainty FormatAhmad BaigNo ratings yet
- Proficiency Testing Scheme Providers ISO IEC 17043 Standard Application DocumentDocument11 pagesProficiency Testing Scheme Providers ISO IEC 17043 Standard Application Documentrani septiani100% (1)
- SWGTOX ValidationFINALDocument52 pagesSWGTOX ValidationFINALArnaldo Santos GomesNo ratings yet
- ASTM E2655 2014 Reportar Incertidumbre ResultadosDocument7 pagesASTM E2655 2014 Reportar Incertidumbre ResultadosDoina MarquezNo ratings yet
- Method Validation PDFDocument63 pagesMethod Validation PDFAhmad Atsari SujudNo ratings yet
- The Concise Calibration & Test Equipment Management Guide: The Concise Collection, #1From EverandThe Concise Calibration & Test Equipment Management Guide: The Concise Collection, #1Rating: 4.5 out of 5 stars4.5/5 (2)
- ISO IEC 17025 A Clear and Concise ReferenceFrom EverandISO IEC 17025 A Clear and Concise ReferenceRating: 5 out of 5 stars5/5 (1)
- ISO 17025 A Complete Guide - 2021 EditionFrom EverandISO 17025 A Complete Guide - 2021 EditionRating: 5 out of 5 stars5/5 (1)
- Capstone Final ReportDocument32 pagesCapstone Final ReportJeff Kim100% (1)
- Application of Digital Twin TechnologyDocument41 pagesApplication of Digital Twin TechnologyHemn Rafiq TofiqNo ratings yet
- A Novel Approach To Derive The Average-Case Behavior of Distributed Embedded SystemDocument11 pagesA Novel Approach To Derive The Average-Case Behavior of Distributed Embedded SystemijccmsNo ratings yet
- Specialized Control ChartsDocument36 pagesSpecialized Control Chartsapi-3701058No ratings yet
- Norma Militar 105eDocument77 pagesNorma Militar 105ePoncho La Lira VillagomezNo ratings yet
- Interpreting Multivariate T2Document11 pagesInterpreting Multivariate T2api-3701058100% (2)
- Auditing ISODocument10 pagesAuditing ISOapi-3701058100% (1)
- Production Part Approval ProcessDocument5 pagesProduction Part Approval Processapi-3701058No ratings yet
- Improving The Sensitivity of T2Document11 pagesImproving The Sensitivity of T2api-3701058100% (2)
- Hotelling T2 For BatchDocument14 pagesHotelling T2 For Batchapi-3701058No ratings yet
- Audits ISO 9000&14000Document16 pagesAudits ISO 9000&14000api-3701058No ratings yet
- Assessment of Multi Variable Control TechniquesDocument4 pagesAssessment of Multi Variable Control Techniquesapi-3701058No ratings yet
- Risk Management AuditDocument3 pagesRisk Management Auditapi-3701058No ratings yet
- ISO17025Document55 pagesISO17025api-3701058No ratings yet
- Kaizen 1Document4 pagesKaizen 1api-3701058No ratings yet
- Joint Adoption of ISO 14000-IsO 9000Document18 pagesJoint Adoption of ISO 14000-IsO 9000api-3701058No ratings yet
- APQP LinkingQualityToolsDocument1 pageAPQP LinkingQualityToolsapi-3701058No ratings yet
- Square, Q-Q Plots &normalityDocument7 pagesSquare, Q-Q Plots &normalityapi-3701058No ratings yet
- IMS A Model Based On A TQ ApproachDocument13 pagesIMS A Model Based On A TQ Approachapi-3701058No ratings yet
- Best Quality Improvement ToolsDocument19 pagesBest Quality Improvement Toolsapi-3701058No ratings yet
- The Role of The Maintenence Ion in An IMSDocument6 pagesThe Role of The Maintenence Ion in An IMSapi-3701058No ratings yet
- Integrated TQMDocument20 pagesIntegrated TQMapi-3701058No ratings yet
- Musings On iIMSDocument10 pagesMusings On iIMSapi-3701058No ratings yet
- ISO14001&OSHA18001Document9 pagesISO14001&OSHA18001api-3701058No ratings yet
- The Integration of The StandardsDocument10 pagesThe Integration of The Standardsapi-3701058No ratings yet
- Integration of MSDocument12 pagesIntegration of MSapi-3701058No ratings yet
- IMS in Small and Medium EnterprisesDocument5 pagesIMS in Small and Medium Enterprisesapi-3701058No ratings yet
- Integrating The Safety Dimension Into QualityDocument19 pagesIntegrating The Safety Dimension Into Qualityapi-3701058No ratings yet
- The ISO 14000 ModelDocument1 pageThe ISO 14000 Modelapi-3701058100% (1)
- Integrating ISO 9000&14000Document8 pagesIntegrating ISO 9000&14000api-3701058No ratings yet
- The Impact of ISO 14000Document7 pagesThe Impact of ISO 14000api-3701058No ratings yet
- The Future of The ISO 14000 FamilyDocument1 pageThe Future of The ISO 14000 Familyapi-3701058100% (1)
- Energy Monitoring With Ultrasonic Flow MetersDocument35 pagesEnergy Monitoring With Ultrasonic Flow MetersViswa NathanNo ratings yet
- RepairManual NEF M100 M150 P3D32N003E Mar06Document172 pagesRepairManual NEF M100 M150 P3D32N003E Mar06manuel segovia100% (1)
- Coyle Chapter 2 PowerPoint SlidesDocument33 pagesCoyle Chapter 2 PowerPoint SlidesKhaled Sheykh0% (1)
- Soal Big A Tukpd 2011-2012 RevisiDocument5 pagesSoal Big A Tukpd 2011-2012 RevisiTriana WatiNo ratings yet
- Intelligence, Reasoning, Creativity, and WisdomDocument3 pagesIntelligence, Reasoning, Creativity, and WisdomSammy DeeNo ratings yet
- Mtech Geotechnical Engineering 2016Document48 pagesMtech Geotechnical Engineering 2016Venkatesh ThumatiNo ratings yet
- Pic24fj256ga705 Family Data Sheet Ds30010118eDocument424 pagesPic24fj256ga705 Family Data Sheet Ds30010118eD GzHzNo ratings yet
- Qanooneislamorcu 00 JafaDocument646 pagesQanooneislamorcu 00 JafaawNo ratings yet
- A Community School: Research Aspect 2 ReportDocument13 pagesA Community School: Research Aspect 2 ReportMarsha MianNo ratings yet
- Introduction To The Philosophy of Science First PartDocument138 pagesIntroduction To The Philosophy of Science First PartChandra Sekhar Sahu100% (1)
- 2G Call FlowDocument71 pages2G Call Flowm191084No ratings yet
- June 2023 BillingDocument10 pagesJune 2023 BillingEsther AkpanNo ratings yet
- Doctors Appointment - 4!14!17 Acid RefluxDocument11 pagesDoctors Appointment - 4!14!17 Acid RefluxRay Edwin Anderson IIINo ratings yet
- Operation Manual: Impedance Audiometer AT235hDocument102 pagesOperation Manual: Impedance Audiometer AT235hmendezoswaldoNo ratings yet
- EV1116 Manual 146251999-4DDocument32 pagesEV1116 Manual 146251999-4Danitha ferryNo ratings yet
- Tabel Benkelman Beam Baru - AsisDocument21 pagesTabel Benkelman Beam Baru - AsisAsisNo ratings yet
- Serospin Operating Manual 20100407Document19 pagesSerospin Operating Manual 20100407Verdana50% (2)
- Engagement & Akad PDFDocument3 pagesEngagement & Akad PDFedputriNo ratings yet
- 28 2001 04 0007Document1 page28 2001 04 0007Fernando FanteNo ratings yet
- Assignment IDocument2 pagesAssignment Ivaishnavi priyaNo ratings yet
- HTP 12 SkodaDocument3 pagesHTP 12 SkodamihnutzuNo ratings yet
- DCT PIR insulation technical data sheetDocument4 pagesDCT PIR insulation technical data sheetHenky MantophaniNo ratings yet
- Lynn Waterhouse - Critique On Multiple IntelligenceDocument20 pagesLynn Waterhouse - Critique On Multiple IntelligencenkrontirNo ratings yet
- Assignment 1 Systems Analysis - EME5601Document7 pagesAssignment 1 Systems Analysis - EME5601Travis GrantNo ratings yet
- Outotec: Managing Talent Globally With Successfactors® SolutionsDocument3 pagesOutotec: Managing Talent Globally With Successfactors® SolutionsxandaniNo ratings yet
- Team Handball SG Pratt v2Document2 pagesTeam Handball SG Pratt v2Peter StonesNo ratings yet
- Presentation 1Document26 pagesPresentation 1Vaibhav Hireraddi100% (1)
- 7 Must Have Equipment Items For Your Church Safety TeamDocument7 pages7 Must Have Equipment Items For Your Church Safety TeamhmareidNo ratings yet
- Op-Amp Comparator: Astable (Or Free-Running) Multivibrators Monostable MultivibratorsDocument5 pagesOp-Amp Comparator: Astable (Or Free-Running) Multivibrators Monostable MultivibratorsYuvaraj ShanNo ratings yet
- CH 2 Atoms, Ions, and MoleculesDocument64 pagesCH 2 Atoms, Ions, and MoleculesBritney SimmsNo ratings yet