Exploiting Acoustic Modality in Micro Air Vehicle (MAV) Missions Towards Synergy in Global R&D Efforts V.S.
.Chandrashekar, Sc G, ADE and B.P.Shashidhara, Sc F, ADE S.Sadasivan, Sc G (Retired), ADE, Hans Elias de Bree and Alex Koers, Microflown Technologies, NL Abstract Vehicles of this type might carry visual, acoustic, chemical or biological sensors (emphasis added), writes Thomas J. Mueller, a widely respected authority on MAVs [1]. Although significant focus as regards MAV based surveillance is in the realms of video and infra-red imagery, acoustics, a sister discipline of optics, has been in the limelight for wrong reasons, as the giveaway mechanical signature of MAV electric motors, somehow to be suppressed. However, acoustic sensors as payloads onboard MAVS can be very useful in their unique non - line of sight and beyond field of view capabilities, for instance, towards detecting direct and indirect fire activity on ground, hear and avoid other UAVS in the air and also a mission, to quote Mueller again, to place acoustic sensors on the outside of a building during a hostage rescue or counter-drug operation . The onboard acoustic sensor can also double as an accurate sensor of RPM of the propellers possibly of use in motor control for MAV manoeuvres. The MAV clearly is a surveillance platform of choice in low intensity conflict scenario and it is important that maximum benefit be derived on situation awareness from its short and urgent missions. Clearly, acoustics is its own nemesis because the MAV motor noise and flow noise can be significant factors when far field sources need to be listened to. Under these environments, an acoustic vector sensor (AVS) with its ability to directly measure particle velocity in three orthogonal directions together with the scalar pressure at a single point in air, offers a powerful option with its ability to determine bearing of a wideband source with simple algorithms. The emergence of microflown, a particle velocity sensor in AVS configuration [2] is a significant development in aeroacoustics measurement technology. The microflown AVS sensor has been deemed appropriate for the battlefield context by Hawkes and Nehorai [3], the latter, especially providing significant theoretical insights on AVS source localization algorithms in many publications [4]. The MEMS technology based microflown sensor is especially of value in MAV payload suite because of its miniature size with the silicon version of the sensor becoming recently available [2]. Presented in this paper is an account of field performance evaluation of the microflown sensor in situation awareness applications under the broad context of defence and security with a view to assess its merits towards developing an acoustic payload system for MAVs . Microflown Technologies have mounted significant R&D work on AVS payload for MAV [4]. It is thought appropriate that efforts between ADE and Microflown Technologies be synergized towards realizing an AVS payload for MAVs. The paper attempts to focus on global partnership modalities on these aspects.
1. ADE Experience in far field acoustic measurements 1.1 EARSS Project
A Technology demonstrator project towards investigating source localization applications exploiting platform acoustic signature propagation features was carried out successfully by ADE between 2004 and 2007 under Project EARSS [5]. The EARSS project scope included (1)
establishment of database on acoustic signature pertaining to propeller aircraft, jet aircraft, helicopters and UAVs under various propagation conditions,(2) studying performance of array processing algorithm using simple array configuration under real world environment, (3) estimating aircraft kinematic parameters relevant to localisation based on instantaneous Dopplers computed using time-frequency distribution algorithm and (4) studying potential of microflown sensor, a vector sensor, for source direction of arrival estimation. A CARS project was also completed that focused on theoretical aspects of AVS algorithms [6]. Typically the scenario of aircraft flying in the vicinity of sensor station in land and ocean environment was taken up for database creation and aircraft localization algorithm development. See Fig.1.
Fig.1 Project EARSS - Measurement platforms and field environment
1.2 Post EARSS acoustic research at ADE 2008 till date A field appreciation of the performance of the Microflown AVS as a ground based sensor towards localizing aircraft and also transient events was obtained in 2008 and 2009 [7,8,9,10 ]. Intensity based and particle velocity correlation based AVS algorithms were evaluated towards passive bearing estimation of low flying aircraft, Fig.2.
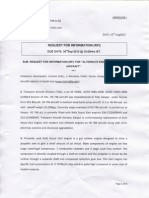
Fig. 2 Vector sensor algorithms are being investigated towards estimating bearing of an aircraft using ground located AVS signals. A recent important ongoing study by ADE pertains to measurement of acoustic environment underneath fuselage of a small aircraft (piloted) using an array of microphones and a 2-D microflown specially fitted below the fuselage of the aircraft for the purpose. A prototype simultaneously sampling 8-channel digital acoustic signal acquisition and storage hardware with programmable sampling rate capability out to 50 kilo samples per second for onboard measurements has been manufactured by a Bangalore firm under ADE auspices. Encouraging results have been obtained towards detecting acoustic transients (played on ground) amid the aerodynamic and propeller noise. Analysis of time varying pressure spectra and pressure particle velocity co-spectra brings out power of these quantities towards contributing to algorithm development of relevance to such intelligence gathering missions. For instance, pressure spectrogram shows the propeller rate frequency component threading through the pulsatile environment in the time-frequency representation and integrated pressure-velocity spectrum shows increased levels during ground fire activity. See Fig. 3.
co-spectrum integral x 10 2 1 0 -1 0 10 20 30 40 50 60 70 time,s pressure spectrogram - front nose end sensor 80 90 100
-3
particle velocity,u and non-collocated pressure sensor signal analysis integral values unscaled red - u & p (rear) black - u & p (front)
Frequency,Hz
200 100 0
0 x 10
-3
10
co-spectrum integral
20 30 40 50 60 70 80 Time,s particle velocity,v and non-collocated pressure sensor signal analysis integral values unscaled red - v & p (rear) black -v & p (front)
90
100
2 1 0 -1 0 10 20
30
40
50 time,s
60
70
80
90
100
Fig.3 Acoustic sensors underneath fuselage of Long Ez aircraft. Pressure and particle velocity signal processing forms basis for algorithmic approaches for localization of transient acoustic source on ground
Work has begun at ADE towards exploring acoustic sensor payload for MAVs. Performance of a COTS wav recorder with microphone sensor is being evaluated for transient detection and also for possible motor control of the MAV using the propeller RPM deduced from onboard acoustic measurements, Fig.4. The onboard sensor could detect a horn sound of a stationary car on ground, Fig.5.
Fig.4 A twin Propeller MAV with a COTS microphone recorder onboard. Spectral analysis helps resolve the propeller RPM differences.
Fig. 5 Onboard MAV acoustic pressure measurements Car horn sound as measured on ground (above) & onboard (lower)
2. Exploiting battlefield acoustics Microflown as an enabling sensor platform [11,12] 2.1 Concept of acoustic vector sensor and possible applications localization in far field source
Acoustic measurements in air have always been based upon (arrays of) sound pressure microphones. After the invention of the Microflown sensor in 1994, capable of measuring directly the acoustic particle velocity in air, acoustic vector sensors have become available . In addition, Microflown based AVSs for underwater use are now being developed.
Fig. 6 Microflown the two-wire sensor, in 3D configuration and as a 3D monolithic chip The acoustic vector sensor represents a completely new generation of acoustic sensors that measures directly the acoustic particle velocity, a physical quantity which was evaluated only indirectly until recently using a pair of closely spaced gradient microphones. See Fig. 6 for configurations. Any sound field can be described by the scalar value sound pressure and the 3D vector value acoustic particle velocity. An acoustic vector sensor (AVS) is a 4 channel sensor capturing the sound pressure and the three orthogonal components of the acoustic particle velocity. A sound pressure microphone is omni-directional: its sensitivity is not dependant on the direction of arrival (DOA) of a sound source. A Microflown particle velocity has a figure of eight sensitivity: its sensitivity is dependant on the cosine of the DOA. An AVS is a small acoustic sensor that is capable of determining the direction of arrival (DOA) of a sound source instantly from the relative amplitudes of the three orthogonal components and for the entire acoustic bandwidth. Local processing on the sensor node itself is therefore possible. The output of such a node is the classification of the acoustic event, providing at least the azimuth (or bearing) and elevation. With some events the range can be determined as well. Traditional systems use the time of arrival at microphones spaced apart in an array to determine the DOA. This technique has some drawbacks: large system size, limited bandwidth and accuracy loss due to wind and temperature changes.
The acoustic vector sensor can be placed on many types of platforms and it can detect multiple simultaneous acoustic signatures: rockets, artillery and mortars (RAM), gunshots, UAVs, rotary wing and fixed wing (both fast jets and propeller driven aircraft) and ground vehicles. Acoustic signatures of both battlefield and underwater sources can be passively exploited towards detecting, localizing and tracking hostile units. Acoustic vector sensors (AVSs) have come to play an increasingly significant role in this technology with application focus on border control, harbor protection, gunshot localization, and situational awareness. Microflown Technologies, Netherlands, has significant R&D programmes and closely interacts with Universities and research institutions with several Ph.D. work being completed around the sensor and associated theoretical models on its performance and applications. Microflown Technologies is conducting several co-funded R&D projects over the next three years including, a dual AVS buoy, mortar localization, sense and avoid for UAVs, RPG detection, and acoustic radar. In Gdansk, Poland, 12 AVS systems are being deployed to enrich an urban video surveillance system. A project to integrate video and AVS is funded in Turkey. The Dutch Ministry of Defence (MoD) has acquired a Microflown shooting range safety system with 10 AVS nodes. 2.2 Microflown in UAV operations Experiments towards detection and classification of UAVs using Microflown AVS have been carried out under the auspices of Microflown Technologies. A few tests have been undertaken with a civilian UAV, and another study is made in Crete in October 2010, where UAVs are used as targets for LFX stinger training. End 2010 a field test was done to measure the Raven mini- UAV under in realistic battlefield conditions (at the Dutch MoD). See Fig. 7 and Fig.8
AVS probe mounted on the nose of the MAV. Onboard MAV acoustic intensity measurements
Fig. 7
Fig. 8 UAV Platforms tested for AVS applications: Raven small UAV, another fixed wing UAV and quad-rotor
2.3 Microflown and impulsive acoustics
Gunshot localization is done by detecting two acoustic events: the shock wave created by the supersonic bullet and the muzzle blast created by the weapon. First trials were conducted by measuring small arms fire from various weapons including 9mm handguns, 5.56mm and 7.62mm rifles, and .50 calibre machine guns. In successive trials real time software was tested. Competitive systems use the time of arrival at microphones spaced apart in an array to determine the DOA. This method is dependent on temperature and wind speed. In an extensive test of Microflown AVS by a large system integrator, it was proved that the angular accuracy is better than 2 degrees [3]. This test has been repeated at the Dutch MoD in 2010, Fig 9.
Fig. 9 Gunshot localization trial with the Dutch MoD using a Diemaco C7 rifle and right Panzer Howitzer localized to 16m accuracy at 680m A theoretical framework to find the shooter location using the DOA of the shock wave and the muzzle blast has been developed and was applied to a field test at the Dutch MoD in 2010. To calculate range, the DOA of the shock wave has to be known in 3D (so both direction and elevation). Traditional systems appear to have problems with elevation measurements. Apart from not knowing the shooters elevation, this also introduces a problem in calculating the distance to the shooter. Within the framework of a NIAG study concerning the protection of civil aircraft against attacks with MANPADS, a dense mesh of sea based and land based autonomous and wireless AVS nodes (6000) will be proposed. Such a solution meets the requirements of a complex scenario monitoring an airport close to sea, mountains and an urban area. The solution is part of a demonstration plan of NIAG 146. In parallel, the sea floating AVS will be developed in a large Aselsan led project (Reconsurve), the land based solution will be developed with Dutch national funding. It is envisaged that such an AVS network can be used for many other less demanding applications such as CRAM, UAV threats, wide area compound protection, etc. Conclusion The applications described go to show that Microflown sensors are suitable for battlefield acoustics and this vision was adopted by both ADE in India [5] and Microflown Technologies and by undisclosed system integrators in 2008, and the US Naval Postgraduate School in 2009 [12 and references therein] . As of the end of 2010, for several acoustic vector sensor based applications,
Microflown Technologies has an R&D cooperation with several large system integrators. Given the strong R&D initiatives already taken by ADE and Microflown Technologies on AVS applications in Defence and Security, it is proposed that a joint synergistic effort between ADE and Microflown Technologies, Netherlands , be mounted to co-develop an acoustic payload system for MAV platforms in a Technology Demonstrator project model with a time frame of 2 years.
Acknowledgement Sincere thanks to Director, ADE, for according permission to this paper submission at Aero India 2011 International Seminar. Colleagues at NAL, MIT, Chennai, Simulation and Structures Divisions at ADE, student interns and engineers and scientists at Microflown Technologies, Netherlands, are thanked for wonderful support for some of the work reported herein. References (1) Thomas J. Mueller, On the Birth of Micro Air Vehicles, International Journal of Micro Air Vehicles, Volume 1 Number 1 2009. (2). de Bree, H.E., A Perspective on Acoustic Vector Sensors in Passive Surveillance Real World Measurements,Algorithms and Applications, Invited Presentation, Aero India 2009 International Seminar, Journal of Aerospace Sciences and Technologies, Aeronautical Society of India, Feb.2009, Vol. 61, no.1, pp. 271-282. (3) Hawkes, M., and Nehorai, A., Wideband Source Localization Using a Distributed Acoustic Vector-Sensor Arry, IEEE Transactions on Signal Processing, Vol.51, No.6, June 2003, pp. 14791491. (4) E.H.G. Tijs, G.C.H.E. de Croon, J.W. Wind, B. Remes, C. De Wagter, H-E de Bree, R.Ruijsink, Hear-and-Avoid for Micro Air Vehicles, IMAV 2010. (5) Environmental Acoustics Remote Sensing Station (EARSS) Development and Evaluation Project No TD-PX-04/ADE-191, ADE, 2004 2007. (6) KP Arunkumar and GV Anand, 3-Dmensional Localization of Acoustic Sources by arbitrarily distributed Vector Sensors: Literature Survey and Implementation of Hawkes-Nehorai Algoritm, Technical Report No PC 99113/1, Dept of Electrical Communication Engineering, IISc, Sept.2006. (7) S.Sadasivan, K.V.Srinivasan, Chhaya Rajput, and S. Ravi Sekar, Sensor and Signal Processing in Passive Acoustic Modality Estimation of Aircraft Flight Dynamic Parameters, Proceedings of the International Conference on Avionics Systems, 22-23 Feb. 2208, Organized by RCI,ASI and IEEE. ICAS 2008, RCI, Hyderabad, India pp. 620-624. (8) Tom Basten, Hans-Elias de Bree, S. Sadasivan., Acoustic eyes, a novel sound source localization and monitoring technique with 3D sound probes, Proceedings, ISMA 2008 International Conference on Noise and Vibration Engineering, September 15-17, 2008, Leuven, Belgium
(9) S. Sadasivan, HE deBree and Tom Basten, "Acoustic Vector Sensor based Intensity Measurements for Passive Localization of Small Aircraft, Journal of Acoustical Society of India, JASI, Vol. 36(1), pp. 8-13, Jan. 2009. (10) S. Sadasivan, Direct Measurement of Particle Velocity New Paradigms in Quantifying Acoustic Fields, Proceedings, National Symposium on Acoustics, NSA 2009, RCI, Hyderabad, 2009. (11) Alex Koers, Acoustic Vector Sensors Increasing Situation Awareness, Presented at Microsystems and Smart Miniaturised systems Information Day, Brussels, June 23, 2009
(12) H.E. deBree, Jelmer Wind, Eric Druyvesteyn and Henk te Kulve, Multipurpose Acoustic Vector Sensors for Battlefield Acoustics A passive sensor to detect multi events that can be used on multiple platforms, NATO Symposium DAMA, Norway, Dec. 2010
You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- As 1926.1 - 2012 Swimming Pool SafetyDocument49 pagesAs 1926.1 - 2012 Swimming Pool SafetyrteteNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Design, Safety and Operability Performances of 220 MWe, 540 MWe & 700 MWe PHWRs in IndiaDocument127 pagesDesign, Safety and Operability Performances of 220 MWe, 540 MWe & 700 MWe PHWRs in IndiaLuptonga100% (2)
- Primary Checkpoint - Science (0846) October 2016 Paper 2 MSDocument12 pagesPrimary Checkpoint - Science (0846) October 2016 Paper 2 MSdinakarc78% (9)
- HATF-IX / NASR Pakistan's Tactical Nuclear Weapons: Implications For Indo-Pak DeterrenceDocument50 pagesHATF-IX / NASR Pakistan's Tactical Nuclear Weapons: Implications For Indo-Pak DeterrenceAditi Malhotra100% (2)
- Technology Development, Design and Safety Features of PHWR and Their Operating PerformanceDocument57 pagesTechnology Development, Design and Safety Features of PHWR and Their Operating PerformanceLuptonga100% (2)
- Rafale The Omnirole Fighter: Direction Générale InternationaleDocument15 pagesRafale The Omnirole Fighter: Direction Générale InternationaleLuptonga100% (1)
- Racial Bias in Pulse Oximetry Measurement: CorrespondenceDocument2 pagesRacial Bias in Pulse Oximetry Measurement: CorrespondenceYony Gutierrez100% (1)
- XDM-300 IMM ETSI B00 8.2.1-8.2.2 enDocument386 pagesXDM-300 IMM ETSI B00 8.2.1-8.2.2 enHipolitomvn100% (1)
- DRDO-ADA - LCA Tejas IOC2 Brochure Final - Dec 2013Document24 pagesDRDO-ADA - LCA Tejas IOC2 Brochure Final - Dec 2013cheenu100% (3)
- Countdown Journal (July 1980)Document8 pagesCountdown Journal (July 1980)LuptongaNo ratings yet
- Atre Book 03Document18 pagesAtre Book 03LuptongaNo ratings yet
- Harry Hillaker Father of The F16Document15 pagesHarry Hillaker Father of The F16LuptongaNo ratings yet
- PSLV c52 Eos 04 v4Document6 pagesPSLV c52 Eos 04 v4LuptongaNo ratings yet
- Recon Scout Robot RFP IAFDocument23 pagesRecon Scout Robot RFP IAFLuptongaNo ratings yet
- ARDE Electronic GuidanceDocument19 pagesARDE Electronic GuidanceLuptonga0% (1)
- Hal Engine RFPDocument6 pagesHal Engine RFPLuptonga100% (1)
- ARVDocument19 pagesARVLuptongaNo ratings yet
- YF 16 AnnotatedDocument61 pagesYF 16 AnnotatedLuptongaNo ratings yet
- Up Rustom II UavDocument25 pagesUp Rustom II UavLuptongaNo ratings yet
- India Coastal Missile (Navy)Document10 pagesIndia Coastal Missile (Navy)Luptonga100% (1)
- Overview of Indian Fast Breeder Nuclear Reactor ProgrammeDocument15 pagesOverview of Indian Fast Breeder Nuclear Reactor ProgrammeLuptongaNo ratings yet
- Indian Participation in CERN Accelerator ProgrammesDocument54 pagesIndian Participation in CERN Accelerator ProgrammesLuptonga100% (1)
- HS 748 Replacement EngineDocument4 pagesHS 748 Replacement EngineLuptongaNo ratings yet
- 0 0 Project Emerald EOI 01 PDFDocument26 pages0 0 Project Emerald EOI 01 PDFLuptongaNo ratings yet
- 03 Chairman AECDocument48 pages03 Chairman AECLuptongaNo ratings yet
- Mini UAV Indian Army 01Document36 pagesMini UAV Indian Army 01LuptongaNo ratings yet
- Evolving Indian Nuclear Programme Rationale and Perspective UPDocument18 pagesEvolving Indian Nuclear Programme Rationale and Perspective UPLuptongaNo ratings yet
- Upload PSLV 1st FlightDocument19 pagesUpload PSLV 1st FlightLuptongaNo ratings yet
- 02 RamannaDocument2 pages02 RamannaLuptongaNo ratings yet
- CABS ReadDocument6 pagesCABS ReadLuptongaNo ratings yet
- Three Dimensionality in Chinese Views On India and SpaceDocument18 pagesThree Dimensionality in Chinese Views On India and SpaceLuptongaNo ratings yet
- NFCDocument46 pagesNFCLuptongaNo ratings yet
- Enabling Technologies For High Voltage Pulse PowerDocument4 pagesEnabling Technologies For High Voltage Pulse PowerLuptongaNo ratings yet
- Amartya Sen's Annie Hall MomentDocument1 pageAmartya Sen's Annie Hall MomentLuptongaNo ratings yet
- Crio - Copy Business Operations - Case Study AssignmentDocument3 pagesCrio - Copy Business Operations - Case Study Assignmentvaishnawnikhil3No ratings yet
- BS en 1044-1999 - Brazing Filler MetalsDocument26 pagesBS en 1044-1999 - Brazing Filler MetalsBorn ToSinNo ratings yet
- Uhde Painting SpecificationDocument34 pagesUhde Painting Specificationmohamed elmasryNo ratings yet
- Future War in Cities Alice Hills PDFDocument5 pagesFuture War in Cities Alice Hills PDFazardarioNo ratings yet
- Eurapipe ABS Pipe - Fittings ManualDocument52 pagesEurapipe ABS Pipe - Fittings ManualLê Minh ĐứcNo ratings yet
- DrainHoles - InspectionDocument14 pagesDrainHoles - Inspectionohm3011No ratings yet
- Hydroponics SummaryDocument4 pagesHydroponics SummaryJose NovoaNo ratings yet
- Online JournalismDocument24 pagesOnline JournalismZandra Kate NerNo ratings yet
- 3.6 God Provides Water and Food MaryDocument22 pages3.6 God Provides Water and Food MaryHadassa ArzagaNo ratings yet
- IPIECA - IOGP - The Global Distribution and Assessment of Major Oil Spill Response ResourcesDocument40 pagesIPIECA - IOGP - The Global Distribution and Assessment of Major Oil Spill Response ResourcesОлегNo ratings yet
- ADD MATH ProjectDocument13 pagesADD MATH Projectmegazat27No ratings yet
- Unit 4 AE Scan OCRed PDFDocument44 pagesUnit 4 AE Scan OCRed PDFZia AhmedNo ratings yet
- Chapter 27 Protists I. Evolution of EukaryotesDocument7 pagesChapter 27 Protists I. Evolution of EukaryotesNadeem IqbalNo ratings yet
- SBLO Jepp Charts PDFDocument12 pagesSBLO Jepp Charts PDFElton CacefoNo ratings yet
- Dinflo DFCSDocument2 pagesDinflo DFCSvictorharijantoNo ratings yet
- Huawei Switch S5700 How ToDocument10 pagesHuawei Switch S5700 How ToJeanNo ratings yet
- Living in a digital age unit review and digital toolsDocument1 pageLiving in a digital age unit review and digital toolsLulaNo ratings yet
- UNIT- 5 IRSDocument78 pagesUNIT- 5 IRSganeshjaggineni1927No ratings yet
- Case Study OrthoDocument21 pagesCase Study Orthojoshua_santiago_5No ratings yet
- De Thi Thu Tuyen Sinh Lop 10 Mon Anh Ha Noi Nam 2022 So 2Document6 pagesDe Thi Thu Tuyen Sinh Lop 10 Mon Anh Ha Noi Nam 2022 So 2Ngọc LinhNo ratings yet
- LinkedIn Learning - Workplace Learning Report 2021 EN 1Document65 pagesLinkedIn Learning - Workplace Learning Report 2021 EN 1Ronald FriasNo ratings yet
- Pirates and Privateers of the Caribbean: A Guide to the GameDocument25 pagesPirates and Privateers of the Caribbean: A Guide to the GameLunargypsyNo ratings yet
- Rozgar Sutra EnglishDocument105 pagesRozgar Sutra EnglishRisingsun PradhanNo ratings yet
- Cases 39 45 PDFDocument11 pagesCases 39 45 PDFYvette Marie VillaverNo ratings yet
- ms360c Manual PDFDocument130 pagesms360c Manual PDFEdgardoCadaganNo ratings yet
- Lesson Plan Earth & SpaceDocument5 pagesLesson Plan Earth & SpaceSol Vega PagdangananNo ratings yet