You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Curl-Noise For Procedural Fluid FlowDocument4 pagesCurl-Noise For Procedural Fluid FlowArthur Gonze MachadoNo ratings yet
- PRACTICE SHEET - 02 (Physics)Document4 pagesPRACTICE SHEET - 02 (Physics)ABD 17No ratings yet
- In-Plane Cyclic Performance of Confined Partially Grouted Masonry Walls With Joint and Vertical ReinforcementDocument12 pagesIn-Plane Cyclic Performance of Confined Partially Grouted Masonry Walls With Joint and Vertical ReinforcementPanayioti ZoupantisNo ratings yet
- Winfried BÖSTERLING International Requirements For Composite Sleepers For Different ApplicationDocument23 pagesWinfried BÖSTERLING International Requirements For Composite Sleepers For Different Applicationazlan.shareNo ratings yet
- LP Phy Sci Q2-M6 (W2)Document3 pagesLP Phy Sci Q2-M6 (W2)MARIA DINA TAYACTACNo ratings yet
- Schaum's Outline of Thermodynamics With Chemical ApplicationsDocument370 pagesSchaum's Outline of Thermodynamics With Chemical ApplicationsMuhammad Usman100% (6)
- Bolt Data: Non-Preloaded Ordinary Bolts Grade 4.6 Bolts in S275 DmeterDocument1 pageBolt Data: Non-Preloaded Ordinary Bolts Grade 4.6 Bolts in S275 DmeterAlphyl BalasabasNo ratings yet
- Load FactorDocument4 pagesLoad Factormgskumar100% (1)
- Pitot TubesDocument12 pagesPitot TubesOscar CruzNo ratings yet
- SDIII LectureDocument210 pagesSDIII LectureKiran BandeNo ratings yet
- Module 2 Physical and Mechanical Properties of Rocks 2Document64 pagesModule 2 Physical and Mechanical Properties of Rocks 2Flora FigueredoNo ratings yet
- Design Procedure For Two Phase SeparatorsDocument6 pagesDesign Procedure For Two Phase Separatorsmadx222222No ratings yet
- Emwf - t185 QsDocument6 pagesEmwf - t185 QsSiva KumarNo ratings yet
- Physics Question Paper - Acadecraft !Document8 pagesPhysics Question Paper - Acadecraft !Amit Shrivastava100% (1)
- Modern Physics Problem Set 14: Page 1 of 3Document3 pagesModern Physics Problem Set 14: Page 1 of 3Muzamil ShahNo ratings yet
- Contiguous Pile Design With StrutsDocument5 pagesContiguous Pile Design With StrutsHabib Ur RahmanNo ratings yet
- US Tsubaki Chain ManualDocument326 pagesUS Tsubaki Chain ManualJorge FernandezNo ratings yet
- Scotch 3cdmas Mock ExamDocument32 pagesScotch 3cdmas Mock ExamFredNo ratings yet
- 3.0 Material Properties of Metals and FailureDocument29 pages3.0 Material Properties of Metals and FailureHasmitthaNo ratings yet
- Ab Ko Witz 1964 LecturesDocument122 pagesAb Ko Witz 1964 LecturesMaria Eduarda Felippe ChameNo ratings yet
- Albert Einstein BiographyDocument1 pageAlbert Einstein BiographyfermrtechNo ratings yet
- Moment-Rotation Characterization of Cold-Formed Steel Beam in Box SectionDocument1 pageMoment-Rotation Characterization of Cold-Formed Steel Beam in Box SectionXavier NietoNo ratings yet
- Chapter - 5 The Step Potential (Continued From Chapter 4)Document5 pagesChapter - 5 The Step Potential (Continued From Chapter 4)solomon mwatiNo ratings yet
- Instrumentation and Control Systems 2 Mid Online BitsDocument8 pagesInstrumentation and Control Systems 2 Mid Online BitstslnarayanaNo ratings yet
- Calculation of Effective Length Factor For Columns As Per BS 5950-1 Annex EDocument49 pagesCalculation of Effective Length Factor For Columns As Per BS 5950-1 Annex Eruhul72No ratings yet
- B.Tech First Year: Course Name: Engineering PhysicsDocument72 pagesB.Tech First Year: Course Name: Engineering PhysicsDhyey DESAIIINo ratings yet
- BIPL - 30th LP List Wef 16.11.2021Document249 pagesBIPL - 30th LP List Wef 16.11.2021Unfeatable GamerNo ratings yet
- H 99 Sec 8 D 1 App 1Document9 pagesH 99 Sec 8 D 1 App 1Benjamin Enmanuel Mango DNo ratings yet
- 506-002-01-05 - 흙막이보고서 (동내면 신촌리 581-4)Document125 pages506-002-01-05 - 흙막이보고서 (동내면 신촌리 581-4)byeby125No ratings yet
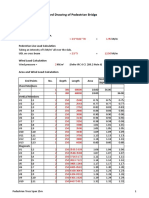
- Preparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsDocument19 pagesPreparation of Standard Drawing of Pedestrian Bridge Span: 60 M Load CalculationsRoshan KejariwalNo ratings yet