JOURNAL OF COMPUTING, VOLUME 3, ISSUE 9, SEPTEMBER 2011, ISSN 2151-9617 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING WWW.JOURNALOFCOMPUTING.
ORG
46
A Hybrid method for Iris Segmentation
Muaadh Sh. Azzubeiry and Dzulkifli Bin Mohammed
Abstract Advance development in security technology has caused many major corporations and governments to start employing modern techniques in identifying the identity of the individuals. Among the common biometric identification methods are facial recognition, fingerprint recognition, speaker verification and so on, presenting a new solution for applications that require a high degree of security. Among these biometric methods, iris recognition becomes an important topic in pattern recognition and it depends on the iris which is located in a place that is still stable through human life. Furthermore, the probability to find two identical irises approaching to zero value is quite easy. The identification system consists of several stages, and segmentation is the most crucial step. The current segmentation methods still have its limitation in localizing the iris due to the circular shape consideration of the pupil. In this paper an enhanced hybrid method, which can guarantee the accuracy of the iris identification system is proposed. The proposed method takes into account the elliptical shape of the pupil and iris. Moreover, Eyelid detection is another step that has been proposed in this paper as a part of segmentation stage. The dataset which is used is CASIA v3 including the three subsets: Interval, Lamp and Twin. The performance measurement of the proposed method is done by determining the number of success images. The results of the study are very promising with an accuracy of 99.1% as compared to the related existing methods. Index Terms Eyelid detection, Iris segmentation, Pupil detection
1 INTRODUCTION
he iris is known as the thin colored area, which is located between the cornea and the lens of the human's eye. Its center is closed by a part known as the pupil [1]. If we make a comparison among biometrics, iris identification systems will gain a good result. Iris texture has a very high degree of freedom and that make it extremely important. What's more, the chance of finding two persons who have the same identical irises is close to zero and most iris patterns remain stable over ones life time. Therefore, the iris identification system is the most reliable among other identification systems and for sure it can be useful in many secure places [2]. A standard iris identification system consists of four stages: acquisition, preprocessing, feature extraction and matching [3]. Preprocessing combines three steps: segmentation, normalization and enhancement. Acquisition is the process of getting the image from the source by using a particularly designed device for this purpose. Preprocessing is used to enhance the captured image and prepare it for the next stage which is feature extraction. Eventually, matching is performed to check whether the current features that have been extracted have a match with the existing features of candidate iris to identify the identical iris [4]. Iris segmentation is the most important and serious step in the iris identification system. It is to localize the exact iris area image from the human eye image. The output of this stage is very important and has played a pri
mary role in the steps after segmentation (normalization, enhancement, feature extraction and matching). The efficiency of iris identification system is primarily dependent on the accurate output of iris segmentation [5]. The iris segmentations role is to identify the iris region in the eye image (fitting detection for iris boundaries); we can see that in figure 1 below.
Figure 1: An iris segmentation stage
Therefore, in this paper we will concentrate on iris segmentation stage to increase the performance of iris recognition system. In addition, an enhanced method to guarantee the accuracy will be applied to increase the accuracy of the identification system.
2 RELATED WORK
Iris segmentation stage is the most important stage that can be the origin of the accuracy of the iris. Based on this fact a lot of researchers exerted their efforts trying to find a suitable algorithm to achieve the goal of including the whole iris. That was because missing to include any part will eventually affect the efficiency of the iris identification system. In [6, 7, 8] proposed the Integro-differential operator (IDO), which actually treated the pupil and limbus of the
Muaadh Sh. Azzubeiry, Faculty of Computer Science and Information Systems Universiti Teknologi Malaysia, 81310, Skudai, Johor, Malaysia. Dzulkifli bin Mohamad, Faculty of Computer Science and Information Systems Universiti Teknologi Malaysia, 81310, Skudai, Johor, Malaysia.
2011 Journal of Computing Press, NY, USA, ISSN 2151-9617
JOURNAL OF COMPUTING, VOLUME 3, ISSUE 9, SEPTEMBER 2011, ISSN 2151-9617 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING WWW.JOURNALOFCOMPUTING.ORG
47
iris as a circular shape and trying to detect these boundaries by yielding a search for large circular variations in the image. An integro-differential operator (IDO) was used for locating the inner and outer boundaries of an iris by means of the following optimization:
and outer boundary of iris.
3 INSPIRATION
Most iris segmentation techniques assume the boundary of pupil and iris to be as a circle, but their boundary is not quite like a circle and a small error in detecting the boundary of the iris will lead to lose some information that exists around the iris. Furthermore, there are a lot of challenges that should be overcome by proposing an enhanced segmentation method that can yield precise results as input to the identification system to enhance its efficiency.
where I (x, y) is the image that contains the eye. The IDO seek over the image domain (x, y) for the maximum in the partial derivative that is blurred due to to increasing radius r, of the integral contour of I (x, y) that has been normalized along a circular arc ds of radius r and center coordinates (x0, y0). The symbol d enotes convol ti u on and G (r) is a smoothing function such as a Gaussian of scale . The common behavior of the IDO is actually a circular edge detector. The IDO searches for the gradient maxima over the 3D parameter space, so there are no threshold parameters required as in the Canny edge detector. By changing the contour path from circular to an accurate design, IDO also detects the upper and lower eyelid boundaries. The integro-differential can be considered as a modified version of the Hough transform, since it also makes use of the image's first derivatives and carry out a search to find geometric parameters. Since it works with raw derivative information, it does not suffer from the threshold problems of the Hough transform. However, the algorithm can fail where there is noise in the eye image, such as from reflections, since it works only on a local scale. A method introduced by [9] to segment iris which was based on rotation average analysis of intensity-inversed image. The method segmented the inner boundary and fitted the outer boundary (both as a circle) by least-square non-linear circular regression. As [10] stated an algorithm to detect the boundaries between both pupil and iris and sclera and iris. A technique called rectangular area is applied in order to find the pupil and detect the inner circle of iris and after that detect the iris outer boundary. A Circle Density Based Iris Segmentation method (CDIS) has been proposed by [11]. It consists of specular reflection deduction, eyelash elimination and Iris segmentation along with eyelid removal based on the local image statistics and block intensity. In addition, [12] proposed a method based on the adaptive boosting eye detection algorithm (AdaBoost), which is an algorithm that constructs a strong classifier by coupling the weak classifiers), in order to balance the iris detection errors caused by the two circular edge detection operations. On the other hand, [13] introduced a new method to segment iris which was based on rotation average analysis of intensity-inversed image in detail. The inner boundary is segmented and the outer boundary is fitted (both as a circle) by least-square non-linear circular regression. [14] Proposed an algorithm for detecting the boundaries between pupil and iris and also sclera and iris. The rectangular area method was applied in order to segment the pupil and detect the inner
4 PROPOSED IRIS SEGMENTATION METHOD
An eye image contains not only the iris region but also contains some unwanted parts like sclera, pupil and eyelids. Moreover, the pupil boundary can be considered as the inner boundary of the iris. For this reason, the proposed method goes through the following steps:
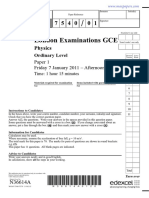
4.1 Pupil Detection In this step, we will detect the pupil in an iris image, taking into account the elliptical shape of the pupil. To do that first, we binarize the image then find the linear indices of the resulting entry image after removing the noise. After that, fit the values that have been found as ellipse. The center of the ellipse will be the intersection of the two lines which have been drawn from the min point to the max point in X- axis with the line from the min value to the max value of Y-axis. Direct Least Square fitting of ellipse which has been proposed by [15] was applied.
Original Image
1-Binary Image
2-Removing Noise
3-Edge Detection
Figure 2: Pupil Detection Steps
4-Pupil Detection
2011 Journal of Computing Press, NY, USA, ISSN 2151-9617
JOURNAL OF COMPUTING, VOLUME 3, ISSUE 9, SEPTEMBER 2011, ISSN 2151-9617 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING WWW.JOURNALOFCOMPUTING.ORG
48
4.2 Iris localization In this step, we can detect the boundary of the iris based on its inner boundary. The same previous method of detecting the pupil is applied by considering the diameter of iris and the center of the pupil.
determined regions that have been mentioned, if the pixel is foreground (eyelid edge), the pixel it will record the x, y of that pixel. From figure 5 below, it can be seen that the green line is our border for each region. The number in each row, the column is how the pixel is traced. In the top-left side (red) region, tracing starts from 1 (see green line) then move to the upper row (2) then move again to upper row (3) until it reach the image border (4) it will start again but in the different column (indicated by number 5). Tracing will be stopped if foreground pixel (eyelid edge) is found.
4 3 2 1
Figure 3: Iris Localization
8 7 6 5 6 7 8
12 11 10 9 10 11 12
8 7 6 5 6 7 8
4 3 2 1 2 3 4
2 3 4
4.3 Eyelid Detection
To determine the edge of the eyelids, the following steps were followed: 1. 2. 3. 4. 5. 6. Extract edge of eyelid using Canny (define threshold value of Canny). Remove unwanted eyelashes and another edge (define threshold value of noise). Divide the eyes into 4 regions based on the center point of the pupil. Tracing pixels in each region to find the eyelid. Save the 4 points of the eyelid [(x, y) top and (x, y) bottom]. Connect each corresponding point to draw the curve/arc.
Figure 5: Searching technique for eyelid point
The determined points that hae been found, will look like the following figure
Figure 6: Determined points in a binarized image of the eye
Top left Top right
After determining the points, an arc should be drawn for each eyelid as shown in figure 7.
Bottom left
Bottom right
Figure 4: Eye regions determination
Figure 7: Eyelid Detection
2011 Journal of Computing Press, NY, USA, ISSN 2151-9617
We should check pixel by pixel in each region of the
JOURNAL OF COMPUTING, VOLUME 3, ISSUE 9, SEPTEMBER 2011, ISSN 2151-9617 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING WWW.JOURNALOFCOMPUTING.ORG
49
EXPERIMENTAL RESULTS
The proposed method was applied using 3060 images including 200 irises taken from CASIA v.3 [17, also including the three subsets. All the steps were carried out using MATLAB on Fujitsu Siemens Laptop, Intel (R) Core(TM) 2 CPU T5600 @ 1.83 GHz, 1 GB RAM, Windows XP Professional Service Pack 3. The results of the proposed method were: iris localization on the interval subset was 99.9%. The same result also was for both subset (Lamp and Twin). Elliptical consideration of the pupil in the segmentation step has played a significant role by including the whole pupil area and then including the whole iris. On the other hand, eyelid detection results were 99.9% on Interval subset while the results were 98% on Lamp and 97% on Twin. The challenge that has been faced was on Twin subset and the difficulty was in finding the right points that should be determined to draw the arc due to the complex borders after extraction. The final results of the proposed segmentation method (iris localization and eyelid detection) with a comparison among some existing methods are presented in Table 1. TABLE 1 THE PERFORMANCE OF THE PROPOSED METHOD AMONG SOME
EXISTING METHODS
Figure 9: Segmentation results with A) Circular shape consideration B) Elliptical shape consideration For Lamp subset.
Method Proposed Gupta [11] Masek Libor [16]
Iris Segmentation Accuracy Interval 99.9% 99.9% 83% Lamp 98.95% 81% 82% Twin 98.45% 80% 81%
Figure 10: Segmentation results with A) Circular shape consideration B) Elliptical shape consideration For Twin subset.
6 CONCLUSION
In this paper, we enhanced a method that can guarantee the accuracy during the segmentation stage to include the whole iris image by considering the elliptical shape of the pupil and the iris. The proposed method includes pupil detection, iris ocalization and eyelid detection. Most techniques that haves been used were based on [1] and [11] techniques.
The results were obtained by calculating the number of images that have been segmented relative to the accurate total number of images. Figure 8,9,10 show the results of segmentation by using either method that considers the pupil as a circle or methods that consider the pupil as an ellipse. Hence, it was concluded that the resulted images of the elliptical shape consideration is better than those which resulted by using circular shape consideration.
7
[1] [2]
REFERENCES
Daugman, J.G. (2004), how iris recognition works, IEEE Trans. Circ. Syst. Video Technol, Vol: 14, pp.2130. Park, H.A. and Park K.R. (2007), Iris recognition based on score level fusion by using SVM, Pattern Recognition Letters Vol:28 (15), pp.20192028. Miyazawa, K., Ito K., Aoki T., Kobayashi K. and Nakajima H. (2008), An effective approach for iris recognition using phasebased image matching, IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol:30 (10), pp. 17411756, Yu, L., Zhang, D. and Wang K. (2007), The relative distance of key point based iris recognition, Pattern Recognition ,Vol:40 (2),pp. 423430. Kim , J., Cho S. and Choi J. (2004), Iris recognition using wavelet features, Journal of VLSI Signal Processing,Vol:38 (2) ,
[3]
[4]
Figure 8: Segmentation results with A) Circular shape consideration B) Elliptical shape consideration for Interval subset.
[5]
2011 Journal of Computing Press, NY, USA, ISSN 2151-9617
JOURNAL OF COMPUTING, VOLUME 3, ISSUE 9, SEPTEMBER 2011, ISSN 2151-9617 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING WWW.JOURNALOFCOMPUTING.ORG
50
[6]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
[14]
[15] [16] [17]
[18]
pp.147156. Daugman, J.G (1993), "High Confidence Visual Recognition of Persons by a Test of Statistical Independence", IEEE Transactions On Pattern Analysis and Machine Intelligence, Vol. 15, pp.1148-1161. Daugman, J.G (2001), Statistical Richness of Visual Phase Information: Update on Recognizing Persons by Iris Patterns, International Journal of Computer Vision, vol:45, no. 1, pp. 2538. Daugman, J.: New methods in iris recognition. IEEE Transactions on Systems, Man, and Cybernetics-Part B 37(5), 11671175 (2007) Wei, Li and Lin-Hua Jiang (2009), Fast Iris Segmentation by Rotation Average Analysis of Intensity-Inversed Image, Springer Berlin / Heidelberg Vol: 5855, pp. 340-349. Rahib Hidayat Abiyev and Koray Altunkaya (2009), Neural Network Based Biometric Personal Identification with Fast Iris Segmentation: The Institute of Control, Robotics and Systems Engineers and The Korean Institute of Electrical Engineers, copublished with Springer-Verlag GmbH,Vol:7, ppt. 17-23. Gupta, Anand, Anita Kumari, Boris Kundu, and Isha Agarwal (2009),CDIS: Circle Density Based Iris Segmentation. Second International Conference, IC3 2009, Noida, Dae, Sik Jeong, Jae Won Hwang, Byung Jun Kang, Kang Ryoung Park, Chee Sun Won, Dong-Kwon Park and Jaihie Kim (2010). A new iris segmentation method for non-ideal iris images, Image and Vision Computing Vol: 28, pp. 254260. Wei, Li and Lin-Hua Jiang (2009), Fast Iris Segmentation by Rotation Average Analysis of Intensity-Inversed Image , Springer Berlin / Heidelberg Vol: 5855, pp. 340-349. Rahib Hidayat Abiyev and Koray Altunkaya (2009), Neural Network Based Biometric Personal Identification with Fast Iris Segmentation: The Institute of Control, Robotics and Systems Engineers and The Korean Institute of Electrical Engineers, copublished with Springer-Verlag GmbH, Vol: 7, ppt. 17-23. Fitzgibbon , A., Pilu M., and Fisher R. B., Direct least square fitting of ellipses, IEEE Trans. Pattern Anal. Machine Intell., vol. 21, pp. 477480, May 1999. Masek L. and Kovesi P. (2003), MATLAB Source Code for a Biometric Identification System Based on Iris Patterns. The School of Computer Science and Software Engineering, The University of Western Australia. CASIA iris database, Institute of Automation, Chinese Academy of Sciences, http://sinobiometrics.com/casiairis.h.
National University of Malaysia in 1978, a Postgraduate Diploma from the University of Glasgow, UK in 1981, a Master of Science from the University of Technology Malaysia in 1990 and Ph.D. from the University of Technology Malaysia in 1997. He held different positions in UTM. He is a consultant for different firms. He supervised more than 120 master and Ph.D. students. Furthermore, he evaluated/examined more than 200 post-graduates. Prof. Dr. Dzulkifli has received numerous awards and published more than 200 research papers in the international journals and conferences. His areas of interest are biometrics, pattern recognition, multimedia signal processing.
Muaadh Sh. Azzubeiry is a Ph.D. student in Computer Science and Information Systems Faculty at the Universiti Teknologi Malaysia, Malaysia. He received his Bachelor of Science in Computer Science in 2002 at Almustansiriah University, Baghdad, Iraq and a Master of Science in Computer Science in 2010 from the University of Technology Malaysia, Malaysia -UTM. In 2011, he started his Ph.D. in Computer Science at the Department of Computer Graphics and Multimedia, UTM. His research interests include pattern recognition and biometrics and security systems (fingerprint classification and recognition, signature verification, iris identification and face recognition). He is till date a lecturer at Sanaa Community College 2002, Yemen.
Prof. Dr. Dzulkifli bin Mohamad is now a Professor at the University of Technology Malaysia. He received his Bachelor of Science from
2011 Journal of Computing Press, NY, USA, ISSN 2151-9617
You might also like
- 3Document14 pages3amk2009No ratings yet
- A Literature Review On Iris Segmentation Techniques For Iris Recognition SystemsDocument5 pagesA Literature Review On Iris Segmentation Techniques For Iris Recognition SystemsInternational Organization of Scientific Research (IOSR)No ratings yet
- A Novel Approach To Iris Localization For IrisDocument19 pagesA Novel Approach To Iris Localization For IrisRajasree PkNo ratings yet
- Literature Review: Iris Segmentation Approaches For Iris Recognition SystemsDocument4 pagesLiterature Review: Iris Segmentation Approaches For Iris Recognition SystemsInternational Journal of computational Engineering research (IJCER)No ratings yet
- Iris Recognition For Personal Identification Using Lamstar Neural NetworkDocument8 pagesIris Recognition For Personal Identification Using Lamstar Neural NetworkAnonymous Gl4IRRjzNNo ratings yet
- Biometric Identification Using Fast Localization and Recognition of Iris ImagesDocument7 pagesBiometric Identification Using Fast Localization and Recognition of Iris ImageslukhachvodanhNo ratings yet
- A Review Paper On Biometric Recognition Using Iris ScannerDocument3 pagesA Review Paper On Biometric Recognition Using Iris ScannerEditor IJRITCCNo ratings yet
- Iris Segmentation For Iris Recognititon Using Hough TransformationDocument5 pagesIris Segmentation For Iris Recognititon Using Hough TransformationInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Review On Iris Segmentation Based On Eyelid Detection For Non Ideal Images by Sonia SiglaDocument4 pagesA Review On Iris Segmentation Based On Eyelid Detection For Non Ideal Images by Sonia Siglaijr_journalNo ratings yet
- International Journal of Computational Engineering Research (IJCER)Document8 pagesInternational Journal of Computational Engineering Research (IJCER)International Journal of computational Engineering research (IJCER)No ratings yet
- Feature Extraction of An Iris For PatternRecognitionDocument7 pagesFeature Extraction of An Iris For PatternRecognitionJournal of Computer Science and EngineeringNo ratings yet
- Iris Scanning ReportDocument17 pagesIris Scanning ReporthunnbajajNo ratings yet
- Iris Based Authentication ReportDocument5 pagesIris Based Authentication ReportDragan PetkanovNo ratings yet
- Fusion of IrisDocument6 pagesFusion of IrisGaurav DiyewarNo ratings yet
- Iris Based Authentication System: R.Shanthi, B.DineshDocument6 pagesIris Based Authentication System: R.Shanthi, B.DineshIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- IrisDocument36 pagesIrisMUDIT_10No ratings yet
- Iris Recognition Using MATLABDocument9 pagesIris Recognition Using MATLABmanojmuthyalaNo ratings yet
- Implementation of Reliable Open SourceDocument6 pagesImplementation of Reliable Open Sourcenilesh_092No ratings yet
- Iris Segmentation Using A New Unsupervised Neural ApproachDocument7 pagesIris Segmentation Using A New Unsupervised Neural ApproachIAES IJAINo ratings yet
- Fcrar2004 IrisDocument7 pagesFcrar2004 IrisPrashant PhanseNo ratings yet
- Enhance Iris Segmentation Method For Person Recognition Based On Image Processing TechniquesDocument10 pagesEnhance Iris Segmentation Method For Person Recognition Based On Image Processing TechniquesTELKOMNIKANo ratings yet
- Iris Recognition SystemthesisDocument6 pagesIris Recognition Systemthesisrebeccaevansspringfield100% (2)
- A New Iris Segmentation Method For Recognition: (Jzhuang, Wangyh, TNT, Jlcui) @NLPR - Ia.ac - CNDocument4 pagesA New Iris Segmentation Method For Recognition: (Jzhuang, Wangyh, TNT, Jlcui) @NLPR - Ia.ac - CNchinmay2882No ratings yet
- Research Paper On Iris RecognitionDocument5 pagesResearch Paper On Iris Recognitioncnowkfhkf100% (1)
- Iris Segmentation Methodology For Non-Cooperative RecognitionDocument7 pagesIris Segmentation Methodology For Non-Cooperative Recognitionanon_447732652No ratings yet
- Iris Recognition Using Modified Fuzzy Hyperline Segment Neural NetworkDocument6 pagesIris Recognition Using Modified Fuzzy Hyperline Segment Neural NetworkJournal of ComputingNo ratings yet
- A Novel Approach To The Detection of Macula in Human Retinal ImageryDocument6 pagesA Novel Approach To The Detection of Macula in Human Retinal ImageryRabia SaeedNo ratings yet
- A Study of Various Soft Computing Techniques For Iris RecognitionDocument5 pagesA Study of Various Soft Computing Techniques For Iris RecognitionInternational Organization of Scientific Research (IOSR)No ratings yet
- An Efficient Iris Segmentation Approach To Develop An Iris Recognition SystemDocument6 pagesAn Efficient Iris Segmentation Approach To Develop An Iris Recognition Systemhhakim32No ratings yet
- Localización Confiable Del Iris Utilizando La Transformada de Hough, La Bisección de Histograma y La ExcentricidadDocument12 pagesLocalización Confiable Del Iris Utilizando La Transformada de Hough, La Bisección de Histograma y La ExcentricidadkimalikrNo ratings yet
- Fusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemDocument9 pagesFusion of Gabor Filter and Steerable Pyramid To Improve Iris Recognition SystemIAES IJAINo ratings yet
- A Human Iris Recognition Techniques To Enhance E-Security Environment Using Wavelet TrasformDocument8 pagesA Human Iris Recognition Techniques To Enhance E-Security Environment Using Wavelet Trasformkeerthana_ic14No ratings yet
- An Atm With EyeDocument24 pagesAn Atm With EyeunweltedNo ratings yet
- Iris Recognition System: A Survey: Pallavi Tiwari, Mr. Pratyush TripathiDocument4 pagesIris Recognition System: A Survey: Pallavi Tiwari, Mr. Pratyush Tripathianil kasotNo ratings yet
- S R SDocument7 pagesS R Sfaizan_keNo ratings yet
- A Closure Looks To Iris Recognition System: Sukhwinder Singh, Ajay JatavDocument7 pagesA Closure Looks To Iris Recognition System: Sukhwinder Singh, Ajay JatavIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- 1 ST Review Doc AishDocument16 pages1 ST Review Doc AishHarikrishnan ShunmugamNo ratings yet
- Corner Sharpening With Modified Harris Corner Detection To Localize Eyes in Facial ImagesDocument5 pagesCorner Sharpening With Modified Harris Corner Detection To Localize Eyes in Facial ImagesUdin GibrigNo ratings yet
- V4 Issue 8 855 859Document5 pagesV4 Issue 8 855 859saiNo ratings yet
- New Methods in Iris Recognition: John DaugmanDocument9 pagesNew Methods in Iris Recognition: John Daugman1manoj1No ratings yet
- Biometric Identification Using Matching Algorithm MethodDocument5 pagesBiometric Identification Using Matching Algorithm MethodInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- E D U F N C - C: Fficient Eyes Etection Sing AST Ormalised Ross OrrelationDocument7 pagesE D U F N C - C: Fficient Eyes Etection Sing AST Ormalised Ross OrrelationsipijNo ratings yet
- Dual Integration of Iris and Palmprint For RealizationDocument6 pagesDual Integration of Iris and Palmprint For Realizationeditor_ijarcsseNo ratings yet
- Low-Complexity Iris Coding and Recognition Based On DirectionletsDocument16 pagesLow-Complexity Iris Coding and Recognition Based On DirectionletsReetika BishnoiNo ratings yet
- (230496172) NewMethodsInIrisRecogDocument12 pages(230496172) NewMethodsInIrisRecogIpung AnwarsNo ratings yet
- A Robust Iris Segmentation Scheme Based On Improved U-NetDocument8 pagesA Robust Iris Segmentation Scheme Based On Improved U-NetpedroNo ratings yet
- Biometric Course:: RashaDocument43 pagesBiometric Course:: Rashabhavani gongaliNo ratings yet
- Fast Identification of Individuals Based On Iris Characteristics For Biometric SystemsDocument4 pagesFast Identification of Individuals Based On Iris Characteristics For Biometric SystemsJonathan RogeriNo ratings yet
- Drowsy Driver Warning For Accident-Avoidance System Using Image ProcessingDocument6 pagesDrowsy Driver Warning For Accident-Avoidance System Using Image ProcessingIJRASETPublicationsNo ratings yet
- Eye State Detection Using Image Processing TechniqueDocument6 pagesEye State Detection Using Image Processing TechniqueAJER JOURNALNo ratings yet
- Ijet V3i4p17Document5 pagesIjet V3i4p17International Journal of Engineering and TechniquesNo ratings yet
- Iris Recognition With Fake IdentificationDocument12 pagesIris Recognition With Fake IdentificationiisteNo ratings yet
- Iris SegmantationDocument23 pagesIris Segmantationعمر اسامه محمد نصر ٢٠١٠٧٨٤٨No ratings yet
- An Effective Segmentation Technique For Noisy Iris ImagesDocument8 pagesAn Effective Segmentation Technique For Noisy Iris ImagesInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Personal Identification Using Iris Recognition System, A ReviewDocument5 pagesPersonal Identification Using Iris Recognition System, A ReviewShakeel RanaNo ratings yet
- Daughman Rubber Sheet Model.Document4 pagesDaughman Rubber Sheet Model.KING BARBNo ratings yet
- Reliable and Fast Eye Finding in Close-Up ImagesDocument6 pagesReliable and Fast Eye Finding in Close-Up ImagesEmilio Marín LópezNo ratings yet
- Eye GazeDocument8 pagesEye Gazeyashaswi_pnNo ratings yet
- Mobile Search Engine Optimization (Mobile SEO) : Optimizing Websites For Mobile DevicesDocument5 pagesMobile Search Engine Optimization (Mobile SEO) : Optimizing Websites For Mobile DevicesJournal of ComputingNo ratings yet
- Analytical Study of AHP and Fuzzy AHP TechniquesDocument4 pagesAnalytical Study of AHP and Fuzzy AHP TechniquesJournal of ComputingNo ratings yet
- Hybrid Network Coding Peer-to-Peer Content DistributionDocument10 pagesHybrid Network Coding Peer-to-Peer Content DistributionJournal of ComputingNo ratings yet
- Applying A Natural Intelligence Pattern in Cognitive RobotsDocument6 pagesApplying A Natural Intelligence Pattern in Cognitive RobotsJournal of Computing100% (1)
- Complex Event Processing - A SurveyDocument7 pagesComplex Event Processing - A SurveyJournal of ComputingNo ratings yet
- Using Case-Based Decision Support Systems For Accounting Choices (CBDSS) : An Experimental InvestigationDocument8 pagesUsing Case-Based Decision Support Systems For Accounting Choices (CBDSS) : An Experimental InvestigationJournal of ComputingNo ratings yet
- Business Process: The Model and The RealityDocument4 pagesBusiness Process: The Model and The RealityJournal of ComputingNo ratings yet
- A Compact Priority Based Architecture Designed and Simulated For Data Sharing Based On Reconfigurable ComputingDocument4 pagesA Compact Priority Based Architecture Designed and Simulated For Data Sharing Based On Reconfigurable ComputingJournal of ComputingNo ratings yet
- Exploring Leadership Role in GSD: Potential Contribution To An Overall Knowledge Management StrategyDocument7 pagesExploring Leadership Role in GSD: Potential Contribution To An Overall Knowledge Management StrategyJournal of ComputingNo ratings yet
- Image Retrival of Domain Name System Space Adjustment TechniqueDocument5 pagesImage Retrival of Domain Name System Space Adjustment TechniqueJournal of ComputingNo ratings yet
- Divide and Conquer For Convex HullDocument8 pagesDivide and Conquer For Convex HullJournal of Computing100% (1)
- Product Lifecycle Management Advantages and ApproachDocument4 pagesProduct Lifecycle Management Advantages and ApproachJournal of ComputingNo ratings yet
- QoS Aware Web Services Recommendations FrameworkDocument7 pagesQoS Aware Web Services Recommendations FrameworkJournal of ComputingNo ratings yet
- Decision Support Model For Selection of Location Urban Green Public Open SpaceDocument6 pagesDecision Support Model For Selection of Location Urban Green Public Open SpaceJournal of Computing100% (1)
- Predicting Consumers Intention To Adopt M-Commerce Services: An Empirical Study in The Indian ContextDocument10 pagesPredicting Consumers Intention To Adopt M-Commerce Services: An Empirical Study in The Indian ContextJournal of ComputingNo ratings yet
- Secure, Robust, and High Quality DWT Domain Audio Watermarking Algorithm With Binary ImageDocument6 pagesSecure, Robust, and High Quality DWT Domain Audio Watermarking Algorithm With Binary ImageJournal of ComputingNo ratings yet
- Real-Time Markerless Square-ROI Recognition Based On Contour-Corner For Breast AugmentationDocument6 pagesReal-Time Markerless Square-ROI Recognition Based On Contour-Corner For Breast AugmentationJournal of ComputingNo ratings yet
- Energy Efficient Routing Protocol Using Local Mobile Agent For Large Scale WSNsDocument6 pagesEnergy Efficient Routing Protocol Using Local Mobile Agent For Large Scale WSNsJournal of ComputingNo ratings yet
- Detection and Estimation of Multiple Far-Field Primary Users Using Sensor Array in Cognitive Radio NetworksDocument8 pagesDetection and Estimation of Multiple Far-Field Primary Users Using Sensor Array in Cognitive Radio NetworksJournal of ComputingNo ratings yet
- Hiding Image in Image by Five Modulus Method For Image SteganographyDocument5 pagesHiding Image in Image by Five Modulus Method For Image SteganographyJournal of Computing100% (1)
- Impact of Facebook Usage On The Academic Grades: A Case StudyDocument5 pagesImpact of Facebook Usage On The Academic Grades: A Case StudyJournal of Computing100% (1)
- Combining Shape Moments Features For Improving The Retrieval PerformanceDocument8 pagesCombining Shape Moments Features For Improving The Retrieval PerformanceJournal of ComputingNo ratings yet
- Application of DSmT-ICM With Adaptive Decision Rule To Supervised Classification in Multisource Remote SensingDocument11 pagesApplication of DSmT-ICM With Adaptive Decision Rule To Supervised Classification in Multisource Remote SensingJournal of ComputingNo ratings yet
- Impact of Software Project Uncertainties Over Effort Estimation and Their Removal by Validating Modified General Regression Neural Network ModelDocument6 pagesImpact of Software Project Uncertainties Over Effort Estimation and Their Removal by Validating Modified General Regression Neural Network ModelJournal of ComputingNo ratings yet
- Arabic Documents Classification Using Fuzzy R.B.F Classifier With Sliding WindowDocument5 pagesArabic Documents Classification Using Fuzzy R.B.F Classifier With Sliding WindowJournal of ComputingNo ratings yet
- K-Means Clustering and Affinity Clustering Based On Heterogeneous Transfer LearningDocument7 pagesK-Means Clustering and Affinity Clustering Based On Heterogeneous Transfer LearningJournal of ComputingNo ratings yet
- Detection of Retinal Blood Vessel Using Kirsch AlgorithmDocument4 pagesDetection of Retinal Blood Vessel Using Kirsch AlgorithmJournal of ComputingNo ratings yet
- Towards A Well-Secured Electronic Health Record in The Health CloudDocument5 pagesTowards A Well-Secured Electronic Health Record in The Health CloudJournal of Computing0% (1)
- Prioritization of Detected Intrusion in Biometric Template Storage For Prevention Using Neuro-Fuzzy ApproachDocument9 pagesPrioritization of Detected Intrusion in Biometric Template Storage For Prevention Using Neuro-Fuzzy ApproachJournal of ComputingNo ratings yet
- When Do Refactoring Tools Fall ShortDocument8 pagesWhen Do Refactoring Tools Fall ShortJournal of ComputingNo ratings yet
- Machine Tools PDFDocument57 pagesMachine Tools PDFnikhil tiwariNo ratings yet
- Skills Check Extra 2ADocument1 pageSkills Check Extra 2AVishmi JayawardeneNo ratings yet
- List of Practicals Class Xii 2022 23Document1 pageList of Practicals Class Xii 2022 23Night FuryNo ratings yet
- Jurnal Direct and Indirect Pulp CappingDocument9 pagesJurnal Direct and Indirect Pulp Cappingninis anisaNo ratings yet
- B1 Editable End-of-Year TestDocument6 pagesB1 Editable End-of-Year TestSyahira Mayadi50% (2)
- Brianna Pratt - l3stl1 - Dsu Lesson Plan TemplateDocument5 pagesBrianna Pratt - l3stl1 - Dsu Lesson Plan Templateapi-593886164No ratings yet
- Deictics and Stylistic Function in J.P. Clark-Bekederemo's PoetryDocument11 pagesDeictics and Stylistic Function in J.P. Clark-Bekederemo's Poetryym_hNo ratings yet
- Mars Atlas MOM 8 13Document6 pagesMars Atlas MOM 8 13aldert_pathNo ratings yet
- 2015 Grade 4 English HL Test MemoDocument5 pages2015 Grade 4 English HL Test MemorosinaNo ratings yet
- Mastering American EnglishDocument120 pagesMastering American Englishmarharnwe80% (10)
- ASHRAE Final Operating Room 508 PDFDocument13 pagesASHRAE Final Operating Room 508 PDFSilisteanu AndreiNo ratings yet
- How Should We Allocate Scarce Resources Over Our Business Portfolio?Document20 pagesHow Should We Allocate Scarce Resources Over Our Business Portfolio?Vivek AryaNo ratings yet
- 7540 Physics Question Paper 1 Jan 2011Document20 pages7540 Physics Question Paper 1 Jan 2011abdulhadii0% (1)
- HAI ROBOTICS Introduction ENV2022.0829 MarketingDocument40 pagesHAI ROBOTICS Introduction ENV2022.0829 MarketingKit WooNo ratings yet
- Unix SapDocument4 pagesUnix SapsatyavaninaiduNo ratings yet
- Discrete Random Variables: 4.1 Definition, Mean and VarianceDocument15 pagesDiscrete Random Variables: 4.1 Definition, Mean and VariancejordyswannNo ratings yet
- Security Policy 6 E CommerceDocument6 pagesSecurity Policy 6 E CommerceShikha MehtaNo ratings yet
- Recognition AND AmbivalenceDocument350 pagesRecognition AND AmbivalenceFrederic ValNo ratings yet
- State Common Entrance Test Cell: 3001 Jamnalal Bajaj Institute of Management Studies, MumbaiDocument9 pagesState Common Entrance Test Cell: 3001 Jamnalal Bajaj Institute of Management Studies, MumbaiSalman AnwarNo ratings yet
- Installation, Operation & Maintenance Manual - Original VersionDocument11 pagesInstallation, Operation & Maintenance Manual - Original VersionAli AafaaqNo ratings yet
- Supreme Court Case Analysis-Team ProjectDocument5 pagesSupreme Court Case Analysis-Team ProjectJasmineA.RomeroNo ratings yet
- Yuzu InstallerDocument3 pagesYuzu InstallerJohnnel PrietosNo ratings yet
- Zimbabwe - Youth and Tourism Enhancement Project - National Tourism Masterplan - EOIDocument1 pageZimbabwe - Youth and Tourism Enhancement Project - National Tourism Masterplan - EOIcarlton.mamire.gtNo ratings yet
- Datasheet of STS 6000K H1 GCADocument1 pageDatasheet of STS 6000K H1 GCAHome AutomatingNo ratings yet
- First Aid Transportation of The InjuredDocument30 pagesFirst Aid Transportation of The InjuredMuhammad Naveed Akhtar100% (1)
- INDUSTRIAL PHD POSITION - Sensor Fusion Enabled Indoor PositioningDocument8 pagesINDUSTRIAL PHD POSITION - Sensor Fusion Enabled Indoor Positioningzeeshan ahmedNo ratings yet
- 20150714rev1 ASPACC 2015Document22 pages20150714rev1 ASPACC 2015HERDI SUTANTONo ratings yet
- Market Structure and TrendDocument10 pagesMarket Structure and TrendbillNo ratings yet
- Photoshoot Plan SheetDocument1 pagePhotoshoot Plan Sheetapi-265375120No ratings yet
- New Regular and Irregular Verb List and Adjectives 1-Ix-2021Document11 pagesNew Regular and Irregular Verb List and Adjectives 1-Ix-2021MEDALITH ANEL HUACRE SICHANo ratings yet