You might also like
- ATSG Tech Books ListDocument2 pagesATSG Tech Books ListLaszlo Fazakas100% (2)
- Snorkel TB80 1997-05 Rev01Document304 pagesSnorkel TB80 1997-05 Rev01Lucho AlencastroNo ratings yet
- PT6A Small Customer Training OptimizadoDocument221 pagesPT6A Small Customer Training Optimizadonestor ivan jerez francoNo ratings yet
- Topics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationFrom EverandTopics in Engineering Logic: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- Master SetDocument624 pagesMaster SetEr Lokesh MahorNo ratings yet
- Ya Y Ya Y2 Ya Y A Y2: Common Data For Questions 3 & 4Document19 pagesYa Y Ya Y2 Ya Y A Y2: Common Data For Questions 3 & 4Rahul RoyNo ratings yet
- Final Report On Staad ProDocument36 pagesFinal Report On Staad ProPangerwati Ozukum90% (10)
- 9A04401 Switching Theory & Logic DesignDocument4 pages9A04401 Switching Theory & Logic DesignsivabharathamurthyNo ratings yet
- Iec 61000-2-5-2017 TR PDFDocument150 pagesIec 61000-2-5-2017 TR PDFMehdi MakarovNo ratings yet
- Clean Architecture A Craftsmans Guide To PDFDocument7 pagesClean Architecture A Craftsmans Guide To PDFMelesio Roldan20% (10)
- Final Apr 03 SolnsDocument16 pagesFinal Apr 03 Solnsapi-3755462No ratings yet
- Gate Sample PaperDocument7 pagesGate Sample Papershettyashwin19No ratings yet
- APR2013P21Document63 pagesAPR2013P21qsashutoshNo ratings yet
- Guessing Papers 1-2-12th Electronics Sub Code C2Document6 pagesGuessing Papers 1-2-12th Electronics Sub Code C2snigdhagulhane0922No ratings yet
- Model QPDocument6 pagesModel QPvlsisivaNo ratings yet
- 9A04306 Digital Logic DesignDocument4 pages9A04306 Digital Logic DesignsivabharathamurthyNo ratings yet
- O Object, Class, Inheritance and PolymorphismDocument6 pagesO Object, Class, Inheritance and Polymorphismstephen sonNo ratings yet
- DLDM Question BankDocument8 pagesDLDM Question BankMayur PatilNo ratings yet
- Birla Institute of Technology and Science, Pilani I SEMESTER 2004-05Document6 pagesBirla Institute of Technology and Science, Pilani I SEMESTER 2004-05navaneeth_kumarNo ratings yet
- Digital Electronics Question BankDocument6 pagesDigital Electronics Question BankReshna ShowkathNo ratings yet
- QuestionBank 15012019Document14 pagesQuestionBank 15012019Mohammed RafaatNo ratings yet
- Tutorial 1 15Document13 pagesTutorial 1 15Charan Kanwal SinghNo ratings yet
- Mecom1 Question PaperDocument12 pagesMecom1 Question Paperpajadhav100% (1)
- Prof. Anantha Chandrakasan and Prof. Don TroxelDocument10 pagesProf. Anantha Chandrakasan and Prof. Don TroxelCristian CastroNo ratings yet
- EE6301 QB FinalDocument21 pagesEE6301 QB FinallithijanarNo ratings yet
- Sample Question Paper - Principles of Digital Techniques-12069Document4 pagesSample Question Paper - Principles of Digital Techniques-12069Jackson AnthonyNo ratings yet
- DLD GTU Question Bank: Chapter-1 Binary SystemDocument129 pagesDLD GTU Question Bank: Chapter-1 Binary Systemnirav34No ratings yet
- Solution ST1 Set ADocument12 pagesSolution ST1 Set Agaurika.sawhney2003No ratings yet
- Comp SC 18Document8 pagesComp SC 18Masiur RahamanNo ratings yet
- DLD GTU Question Bank: Chapter-1 Binary SystemDocument5 pagesDLD GTU Question Bank: Chapter-1 Binary Systemnirav34No ratings yet
- EE6301 DLC Question Bank Rejinpaul 2Document8 pagesEE6301 DLC Question Bank Rejinpaul 2aruljothiNo ratings yet
- Principles of Digital Techniques On Web PDFDocument5 pagesPrinciples of Digital Techniques On Web PDFmdwalunjkar3095No ratings yet
- 3CS3 04 PDFDocument3 pages3CS3 04 PDFprashantvlsiNo ratings yet
- Assignment EDES232CDocument3 pagesAssignment EDES232CPrakash DasNo ratings yet
- Digital Electronics Tutorial Sheet-1Document13 pagesDigital Electronics Tutorial Sheet-1shraddhabansalNo ratings yet
- Department of EceDocument8 pagesDepartment of Ecerajendr_46No ratings yet
- 04 30067 Electronic Engineering January 2022 Exam PaperDocument10 pages04 30067 Electronic Engineering January 2022 Exam PaperCharlie CoxNo ratings yet
- (EIC& Est: Thapar University PatialaDocument1 page(EIC& Est: Thapar University PatialaKshitij GulatiNo ratings yet
- Computer Architecture: Ph.D. Qualifiers Examination - Sample QuestionsDocument2 pagesComputer Architecture: Ph.D. Qualifiers Examination - Sample QuestionsAkeNo ratings yet
- LAB #7 - Section 02 (15:30-18:30) : File Handling, Numpy and Matplotlib in Python (Due: End of The Lab)Document3 pagesLAB #7 - Section 02 (15:30-18:30) : File Handling, Numpy and Matplotlib in Python (Due: End of The Lab)Gloria HuNo ratings yet
- Deld QB EndsemDocument4 pagesDeld QB EndsemUV New MoviesNo ratings yet
- Sample CSE370 Final Exam Questions: Logic MinimizationDocument8 pagesSample CSE370 Final Exam Questions: Logic MinimizationQaseem HussainNo ratings yet
- 9A04401 Switching Theory and Logic DesignDocument4 pages9A04401 Switching Theory and Logic DesignsivabharathamurthyNo ratings yet
- Ec1312 QBDocument7 pagesEc1312 QBGopinathan MuthusamyNo ratings yet
- EC2203 U Q BankDocument12 pagesEC2203 U Q Bankvlsi_satheeshNo ratings yet
- ECE 341 Final Exam Solution: Problem No. 1 (10 Points)Document9 pagesECE 341 Final Exam Solution: Problem No. 1 (10 Points)bsudheertecNo ratings yet
- UNIT WISE QUEST DIGITAL LOGIC DESIGN - GIET 2019 II - I (3rd Sem)Document18 pagesUNIT WISE QUEST DIGITAL LOGIC DESIGN - GIET 2019 II - I (3rd Sem)Deepak NaiduNo ratings yet
- DLD Question BankDocument5 pagesDLD Question BankHarshad ThiteNo ratings yet
- s4 Cse Ns May 2013Document15 pagess4 Cse Ns May 2013rakhilpvNo ratings yet
- Switching Theory and Logic DesignDocument8 pagesSwitching Theory and Logic DesignVenkat ChadalavadaNo ratings yet
- Computer Applications and ManagementDocument11 pagesComputer Applications and ManagementParag PaliwalNo ratings yet
- 194 Sorting in Linear Time: 8.2 Counting SortDocument3 pages194 Sorting in Linear Time: 8.2 Counting SortLizbeth AzNo ratings yet
- STLD 2009 RegularDocument4 pagesSTLD 2009 RegularrangerNo ratings yet
- Not An Exam PaperDocument5 pagesNot An Exam PaperJill chaudharyNo ratings yet
- Network Basics CollectionDocument11 pagesNetwork Basics Collectionrocks66aryanNo ratings yet
- FAQs - CS1202 Digital Principles and System DesignDocument13 pagesFAQs - CS1202 Digital Principles and System DesignsridharanchandranNo ratings yet
- Te Oct 2014Document149 pagesTe Oct 2014contrasterNo ratings yet
- DE - KOE 039 - Question BankDocument6 pagesDE - KOE 039 - Question Bankyash vatsNo ratings yet
- Thapar University, Patiala: Proc # RTN #A RTN #B RTN #C RTN #DDocument2 pagesThapar University, Patiala: Proc # RTN #A RTN #B RTN #C RTN #DAdamyaKaushikNo ratings yet
- MST 2017 (O) PDFDocument2 pagesMST 2017 (O) PDFAdamyaKaushikNo ratings yet
- Digital System Design: Provided by Humayra JahanDocument5 pagesDigital System Design: Provided by Humayra JahanZabirNo ratings yet
- For Each Question First Design Your Circuit On The Paper!!! (Document3 pagesFor Each Question First Design Your Circuit On The Paper!!! (Mehmethan AyrımNo ratings yet
- Digital Electronics 2: Sequential and Arithmetic Logic CircuitsFrom EverandDigital Electronics 2: Sequential and Arithmetic Logic CircuitsRating: 5 out of 5 stars5/5 (1)
- Final Dec 2003Document6 pagesFinal Dec 2003api-3755462No ratings yet
- Final Dec 2002Document5 pagesFinal Dec 2002api-3755462No ratings yet
- Final Apr 2002Document5 pagesFinal Apr 2002api-3755462100% (2)
- December 2005 WithsloutionDocument21 pagesDecember 2005 Withsloutionapi-3755462No ratings yet
- TopicsDocument2 pagesTopicsapi-3755462100% (2)
- IEEEXplore Global All-JournalsDocument51 pagesIEEEXplore Global All-JournalsTameemuddinNo ratings yet
- Peace Corps Spanish I & WorkbookDocument157 pagesPeace Corps Spanish I & WorkbookElie YabroudiNo ratings yet
- 9ma0 01 Rms 20230817Document35 pages9ma0 01 Rms 20230817aali010800No ratings yet
- 2 - Transformers - FIDPDocument12 pages2 - Transformers - FIDPLoumarie C. ZepedaNo ratings yet
- Catalog Lampu PijarDocument32 pagesCatalog Lampu PijarMuhammad Nuryaqin Pratama PutraNo ratings yet
- Kompatibilost Starih BlicevaDocument38 pagesKompatibilost Starih BlicevaAleksandar RisticNo ratings yet
- Asymmetric Cryptography:: Generating Private KeyDocument4 pagesAsymmetric Cryptography:: Generating Private KeyGaurav SrivastavNo ratings yet
- Detecting SQL Injection Attacks Based On Text Analysis: Lu Yu, Senlin Luo, Limin PanDocument7 pagesDetecting SQL Injection Attacks Based On Text Analysis: Lu Yu, Senlin Luo, Limin PanPramono PramonoNo ratings yet
- WEG Motor Scan Gateway Cassia X1000 Manual 10008451731 PT en EsDocument74 pagesWEG Motor Scan Gateway Cassia X1000 Manual 10008451731 PT en EsMiguel LunaNo ratings yet
- ECA2+ Tests Language Test 4C 2018Document6 pagesECA2+ Tests Language Test 4C 2018Czarek MNo ratings yet
- 2020 TCV-X and TCV-XMAX Tactical Command Vehicle Demo DetailsDocument1 page2020 TCV-X and TCV-XMAX Tactical Command Vehicle Demo DetailsMoukhtar KamelNo ratings yet
- Pal007a DatasheetDocument1 pagePal007a DatasheetCarlos Iran Benítez MedinaNo ratings yet
- Ball Mill FLSDocument15 pagesBall Mill FLSMudassir RafiqNo ratings yet
- Saf 7113 HTDocument80 pagesSaf 7113 HTgheo23No ratings yet
- Theme Installation StepsDocument10 pagesTheme Installation Steps.No ratings yet
- Mmbth10 (SMD 3em Sot-23) Transistor NPN Vhf-UhfDocument4 pagesMmbth10 (SMD 3em Sot-23) Transistor NPN Vhf-UhfJesus Hung RodriguezNo ratings yet
- Practical Guidelines Myomed 632Document23 pagesPractical Guidelines Myomed 632Nedal AltaherNo ratings yet
- ASVAB Word Knowledge Practice Test 5Document5 pagesASVAB Word Knowledge Practice Test 5ASVABTestBankNo ratings yet
- Ampeg SVT Classic Owner's GuideDocument8 pagesAmpeg SVT Classic Owner's GuideAlexandre S. CorrêaNo ratings yet
- Product DatasheetDocument1 pageProduct DatasheetCătălin NicoarăNo ratings yet
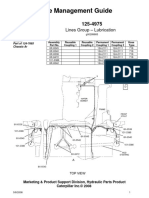
- Hose Management Guide: SN: 4AR Lines Group - LubricationDocument52 pagesHose Management Guide: SN: 4AR Lines Group - LubricationNY DanyNo ratings yet
- Optimization of Multi-Stage Constant Current Charging Pattern Based OnDocument9 pagesOptimization of Multi-Stage Constant Current Charging Pattern Based OnBao BaoNo ratings yet
- The Use of Unmanned Aerial Vehicles (Uavs) For Remote Sensing and MappingDocument6 pagesThe Use of Unmanned Aerial Vehicles (Uavs) For Remote Sensing and MappingBesim BnproNo ratings yet
- Global Data Center Newsletter - 2023.06.15Document22 pagesGlobal Data Center Newsletter - 2023.06.15indr4m4 7u5ufNo ratings yet