You might also like
- Day 2 1 Advanced-OpenmpDocument52 pagesDay 2 1 Advanced-OpenmpJAMEEL AHMADNo ratings yet
- CPP SlidesDocument231 pagesCPP Slidesapi-3711149No ratings yet
- Basic Code Optimizations in CDocument5 pagesBasic Code Optimizations in CKrishanu ModakNo ratings yet
- PIC16F87X Tutorial Sample Ccs CompilerDocument21 pagesPIC16F87X Tutorial Sample Ccs Compileremmanuel.braud6065100% (9)
- Introduction To C' Programming For MicrocontrollersDocument19 pagesIntroduction To C' Programming For MicrocontrollersUsman Ullah AsifNo ratings yet
- PIC16F87X Tutorial by Example: Document HistoryDocument69 pagesPIC16F87X Tutorial by Example: Document Historymytran1325No ratings yet
- Program Flow: Contents of This SectionDocument6 pagesProgram Flow: Contents of This SectionmuddasaryaminNo ratings yet
- Arduino PID CompleteDocument27 pagesArduino PID CompleteNorizham Abdul Razak100% (1)
- Oving-The-Beginners-Pid-Introduction/ Improving The Beginner's PID - IntroductionDocument2 pagesOving-The-Beginners-Pid-Introduction/ Improving The Beginner's PID - IntroductionmathsantosNo ratings yet
- C++ Cheat Sheet & Quick ReferenceDocument25 pagesC++ Cheat Sheet & Quick ReferenceMuhammad SalmanNo ratings yet
- How To Measure The Time in MultiDocument6 pagesHow To Measure The Time in MultiveenadivyakishNo ratings yet
- Unit 2.6 For, Do, While LoopDocument40 pagesUnit 2.6 For, Do, While LoopSanya SharmaNo ratings yet
- Linuxwochen2007 SocatDocument55 pagesLinuxwochen2007 SocatGabrijela BegićNo ratings yet
- Week 1: Getting Started With C++: BackgroundDocument63 pagesWeek 1: Getting Started With C++: BackgroundJeetendra SinghNo ratings yet
- Balancebot CodeDocument8 pagesBalancebot CodeSam Fisher LambertNo ratings yet
- OneWire Ds18b020 Termometre UygulamasımikrocDocument4 pagesOneWire Ds18b020 Termometre Uygulamasımikrocabdulkadir dönerNo ratings yet
- Arduino Lab - COVID - 5301Document9 pagesArduino Lab - COVID - 5301Bing WangNo ratings yet
- Define PRDocument46 pagesDefine PRsolarisan4No ratings yet
- Arduino Clinic 2Document24 pagesArduino Clinic 2Benjamin Dover100% (1)
- Enb 4Document11 pagesEnb 4Pon Vignesh vickyNo ratings yet
- ElectronoobsDocument5 pagesElectronoobsTaufiq QurahmanNo ratings yet
- TCP/IP - Socket Programming: Jrb@socket - To.meDocument30 pagesTCP/IP - Socket Programming: Jrb@socket - To.meChristian StewartNo ratings yet
- Programming With ThreadsDocument17 pagesProgramming With ThreadsrajNo ratings yet
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- 17 Shared MemoryDocument73 pages17 Shared MemoryYuniel Armando González TorresNo ratings yet
- This Study Resource Was: Modelsim Pe Student Edition Is A Free Download of The Industry-LeadingDocument8 pagesThis Study Resource Was: Modelsim Pe Student Edition Is A Free Download of The Industry-Leading다나No ratings yet
- Unit 2: Beginning With C++Document46 pagesUnit 2: Beginning With C++Sayali PatilNo ratings yet
- Oop C++ Book Solution All Mcq's PDFDocument37 pagesOop C++ Book Solution All Mcq's PDFmitranNo ratings yet
- Lab: Initial Setup: 1. Create The Symbolic Link To The Lab Source DirectoryDocument41 pagesLab: Initial Setup: 1. Create The Symbolic Link To The Lab Source DirectoryaanbalanNo ratings yet
- Solution Exe Ques PDFDocument37 pagesSolution Exe Ques PDFmitranNo ratings yet
- Oop C++ Book Solution All Mcq's PDFDocument37 pagesOop C++ Book Solution All Mcq's PDFmitranNo ratings yet
- Mitran PDFDocument37 pagesMitran PDFmitranNo ratings yet
- Course C++Document23 pagesCourse C++aya Mohamed abdelrahmanNo ratings yet
- SWE2007 - Fundamentals of Operating SystemsDocument6 pagesSWE2007 - Fundamentals of Operating SystemsmaneeshmogallpuNo ratings yet
- The Basic Structure of The C/C++ Language: I. ObjectivesDocument8 pagesThe Basic Structure of The C/C++ Language: I. ObjectivesAdamNo ratings yet
- Dallas DS2450 Emulation With Tiny AVRDocument10 pagesDallas DS2450 Emulation With Tiny AVRVladimir YershovNo ratings yet
- CP - Unit 1 - 2Document43 pagesCP - Unit 1 - 226Bhutesh kumar meher ITNo ratings yet
- Chapter 6 - Code GenerationDocument22 pagesChapter 6 - Code GenerationArebu MarufNo ratings yet
- Course: Parallel Processing Lab #2 - Multithreads and OpenmpDocument14 pagesCourse: Parallel Processing Lab #2 - Multithreads and OpenmpLong NhậtNo ratings yet
- Lesson 06Document13 pagesLesson 06Mz zaveriNo ratings yet
- C++ Notes TO USEDocument53 pagesC++ Notes TO USEolamilekan00100No ratings yet
- C - Data TypesDocument4 pagesC - Data TypesDeepesh RohillaNo ratings yet
- ECE391 Ch5 Basic C++ ProgrammingDocument25 pagesECE391 Ch5 Basic C++ ProgrammingLoc LeNo ratings yet
- Instrumentation and Measurement Project Report PDFDocument13 pagesInstrumentation and Measurement Project Report PDFShahzaib IqbalNo ratings yet
- Lecture 6b CPP More BasicsDocument84 pagesLecture 6b CPP More BasicsRuben KempterNo ratings yet
- Jon Ece341 DCMDocument4 pagesJon Ece341 DCMapi-317118620No ratings yet
- RangkaianDocument6 pagesRangkaianRirinNo ratings yet
- OS Lab Record - 19Document58 pagesOS Lab Record - 19Rajeshkannan VasinathanNo ratings yet
- Tech ME007 PDFDocument12 pagesTech ME007 PDFfredniels100% (2)
- Transport Layer: UDP: COMS W6998 Spring 2010Document25 pagesTransport Layer: UDP: COMS W6998 Spring 2010Jason LeeNo ratings yet
- Tutorial LTE SimDocument6 pagesTutorial LTE SimgowdamandaviNo ratings yet
- Programming Fundamentals Lab 06 (Simple Loops and Switch)Document6 pagesProgramming Fundamentals Lab 06 (Simple Loops and Switch)Ahmad AbduhuNo ratings yet
- Gpioonewire Sample (Dht11) : Windows Dev CenterDocument7 pagesGpioonewire Sample (Dht11) : Windows Dev CenterDiego PhillipeNo ratings yet
- Arduino Pellet Boiler Data Logger v1 My Nerd StuffDocument36 pagesArduino Pellet Boiler Data Logger v1 My Nerd StuffmyEbooks0% (1)
- OpenMP ProgramsDocument4 pagesOpenMP ProgramsAnkur HirwaniNo ratings yet
- LED ButtonDocument14 pagesLED Buttonlabirint10No ratings yet
- Hochiminh City University of Technology Computer Science and EngineeringDocument35 pagesHochiminh City University of Technology Computer Science and EngineeringĐại Vinh NguyễnNo ratings yet
- Lecture 2Document53 pagesLecture 2Diana MocanuNo ratings yet
- S6B1713Document70 pagesS6B1713api-3755810No ratings yet
- Ibl DspiclistDocument1 pageIbl Dspiclistapi-3755810No ratings yet
- Display Grafico KSO713Document68 pagesDisplay Grafico KSO713Sair Puello RuizNo ratings yet
- Problem On Samsung KS0713 - Crystalfontz LCD ForumDocument2 pagesProblem On Samsung KS0713 - Crystalfontz LCD Forumapi-37558100% (1)
- GTP Usb Pic ProgrammerDocument1 pageGTP Usb Pic Programmerapi-3755810100% (3)
- DsPIC30F 5011 Development Board - Open CircuitsDocument34 pagesDsPIC30F 5011 Development Board - Open Circuitsapi-3755810100% (6)
- Problem On Samsung KS0713 - Crystalfontz LCD ForumDocument3 pagesProblem On Samsung KS0713 - Crystalfontz LCD Forumapi-3755810No ratings yet
- Mono LCD128 X 64Document1 pageMono LCD128 X 64api-3755810No ratings yet
- CCS - View Topic - Triggering INT - EXT1 On H - TO - LDocument1 pageCCS - View Topic - Triggering INT - EXT1 On H - TO - Lapi-3755810No ratings yet
- CCS - View Topic - Wrong Filter OutputDocument3 pagesCCS - View Topic - Wrong Filter Outputapi-3755810No ratings yet
- The Anatomy of DMX-512Document5 pagesThe Anatomy of DMX-512api-3755810No ratings yet
- Icd 2Document4 pagesIcd 2api-3755810No ratings yet
- CCS - View Topic - Sub Microsecond TimingDocument3 pagesCCS - View Topic - Sub Microsecond Timingapi-3755810No ratings yet
- CCS - View Topic - Using Hardware Interrupt (INT0)Document2 pagesCCS - View Topic - Using Hardware Interrupt (INT0)api-3755810100% (1)
- CCS - View Topic - Multiple InterruptsDocument2 pagesCCS - View Topic - Multiple Interruptsapi-3755810No ratings yet
- CCS - View Topic - Low Voltage Detect InterruptDocument3 pagesCCS - View Topic - Low Voltage Detect Interruptapi-3755810No ratings yet
- CCS - View Topic - SET BIT IN PIC REGISTERDocument2 pagesCCS - View Topic - SET BIT IN PIC REGISTERapi-3755810100% (2)
- CCS - View Topic - Stability Issues With ADCDocument6 pagesCCS - View Topic - Stability Issues With ADCapi-3755810No ratings yet
- CCS - View Topic - SOLVED - Problem With INT - RDA Not Beeing FDocument5 pagesCCS - View Topic - SOLVED - Problem With INT - RDA Not Beeing Fapi-3755810100% (3)
- CCS - View Topic - Multiple PWM OutputsDocument24 pagesCCS - View Topic - Multiple PWM Outputsapi-3755810No ratings yet
- CCS - View Topic - INT - EXT Interrupting in EnableDocument2 pagesCCS - View Topic - INT - EXT Interrupting in Enableapi-3755810100% (3)
- CCS - View Topic - Is PortB The Only Place For A Hardware inDocument2 pagesCCS - View Topic - Is PortB The Only Place For A Hardware inapi-3755810No ratings yet
- CCS - View Topic - Interrupt Problem After Migration 16f877Document8 pagesCCS - View Topic - Interrupt Problem After Migration 16f877api-3755810No ratings yet
- CCS - View Topic - INT0 Interrupt 18F242Document3 pagesCCS - View Topic - INT0 Interrupt 18F242api-3755810No ratings yet
- CCS - View Topic - Fast Interrupts For Timer0, Timer1 and TiDocument9 pagesCCS - View Topic - Fast Interrupts For Timer0, Timer1 and Tiapi-3755810100% (3)
- CCS - View Topic - Interrupt Ext - Int - Edge Triggers BackwardsDocument3 pagesCCS - View Topic - Interrupt Ext - Int - Edge Triggers Backwardsapi-3755810No ratings yet
- CCS - View Topic - Impossible To Use RB0 As InterruptDocument6 pagesCCS - View Topic - Impossible To Use RB0 As Interruptapi-3755810No ratings yet
- CCS - View Topic - Infrared Receiver For SONY RemotesDocument2 pagesCCS - View Topic - Infrared Receiver For SONY Remotesapi-3755810100% (1)
- CCS - View Topic - Enable Timer1 Interrupt in Another ISRDocument4 pagesCCS - View Topic - Enable Timer1 Interrupt in Another ISRapi-3755810100% (2)
- CCS - View Topic - Does Anybody Try EX - USB - SERIALDocument6 pagesCCS - View Topic - Does Anybody Try EX - USB - SERIALapi-3755810No ratings yet
- Pathfinder House RulesDocument2 pagesPathfinder House RulesilililiilililliliI100% (1)
- History and Development of StatisticsDocument4 pagesHistory and Development of Statisticsjosedenniolim96% (27)
- Taguig City University: College of Information and Communication TechnologyDocument9 pagesTaguig City University: College of Information and Communication TechnologyRay SenpaiNo ratings yet
- Engineering & Machinery Corp vs. CADocument8 pagesEngineering & Machinery Corp vs. CALaila Ismael SalisaNo ratings yet
- Moral IssuesDocument34 pagesMoral IssuesDaryll Jade PoscabloNo ratings yet
- ProEXR ManualDocument44 pagesProEXR ManualSabine BNo ratings yet
- Presentation 2Document32 pagesPresentation 2Jackie LeeNo ratings yet
- Polaris Ranger 500 ManualDocument105 pagesPolaris Ranger 500 ManualDennis aNo ratings yet
- Roque v. IACDocument3 pagesRoque v. IACBryce KingNo ratings yet
- MODULE-1-EU111 Univeristy and IDocument8 pagesMODULE-1-EU111 Univeristy and IAbzchen YacobNo ratings yet
- Đo Nhiệt Độ LI-24ALW-SelectDocument4 pagesĐo Nhiệt Độ LI-24ALW-SelectThang NguyenNo ratings yet
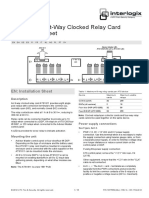
- Ats1811 MLDocument16 pagesAts1811 MLWathNo ratings yet
- Ch10ex10-3 Cost AccountingDocument2 pagesCh10ex10-3 Cost AccountingRichKingNo ratings yet
- New Champlain Bridge: Final Report Summary (English)Document82 pagesNew Champlain Bridge: Final Report Summary (English)andyrigaNo ratings yet
- NISE3600EDocument2 pagesNISE3600ENgo CuongNo ratings yet
- Mba Mini Project ReportDocument32 pagesMba Mini Project ReportAvneesh KumarNo ratings yet
- Annexure 3 Courtesy Car AgreementDocument3 pagesAnnexure 3 Courtesy Car AgreementManishNo ratings yet
- Introduction To Risk Management and Insurance 10th Edition Dorfman Test BankDocument26 pagesIntroduction To Risk Management and Insurance 10th Edition Dorfman Test BankMichelleBellsgkb100% (50)
- Performance Online - Classic Car Parts CatalogDocument168 pagesPerformance Online - Classic Car Parts CatalogPerformance OnlineNo ratings yet
- Case Study (3 To 5 Months Test Plan) : Test Deliverable Responsibility Completion TimeDocument1 pageCase Study (3 To 5 Months Test Plan) : Test Deliverable Responsibility Completion Timepry_kumNo ratings yet
- MCQ Criminal Law 1Document18 pagesMCQ Criminal Law 1Clark Vincent Ponla0% (1)
- Alex FordDocument4 pagesAlex FordElectroventica ElectroventicaNo ratings yet
- Sciencedirect Sciencedirect SciencedirectDocument7 pagesSciencedirect Sciencedirect SciencedirectMiguel AngelNo ratings yet
- Astm D7830 - D7830M-2013 - 8750Document3 pagesAstm D7830 - D7830M-2013 - 8750Wael SeoulNo ratings yet
- 1580823068890043Document6 pages1580823068890043Cristopher Dave CabañasNo ratings yet
- Talent Neuron NewsletterDocument2 pagesTalent Neuron NewsletterTalent NeuronNo ratings yet
- Micro Link Information Technology Business College: Department of Software EngineeringDocument34 pagesMicro Link Information Technology Business College: Department of Software Engineeringbeki4No ratings yet
- Materials Science and Engineering ADocument10 pagesMaterials Science and Engineering Akhudhayer1970No ratings yet
- ITEC 11 Lesson 1.1Document35 pagesITEC 11 Lesson 1.1ivyquintelaNo ratings yet
- A Case Study On Mahindra's Blue Sense Application Project by RohitDocument43 pagesA Case Study On Mahindra's Blue Sense Application Project by RohitrohitNo ratings yet