You might also like
- Modern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingFrom EverandModern Engine Blueprinting Techniques: A Practical Guide to Precision Engine BlueprintingRating: 4.5 out of 5 stars4.5/5 (9)
- Band Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsFrom EverandBand Saw (Missing Shop Manual): The Tool Information You Need at Your FingertipsRating: 5 out of 5 stars5/5 (1)
- Chainsaw Carving for Beginners: Patterns and 250 Step-by-Step PhotosFrom EverandChainsaw Carving for Beginners: Patterns and 250 Step-by-Step PhotosNo ratings yet
- Machinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionFrom EverandMachinery's Handbook Pocket Companion: Quick Access to Basic Data & More from the 31st EditionNo ratings yet
- Unit-4 Bevel GearsDocument27 pagesUnit-4 Bevel GearsMarthande0% (1)
- MF 5460Document586 pagesMF 5460Maximiliano Hitschfeld100% (2)
- Traditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingFrom EverandTraditional Toolmaking: The Classic Treatise on Lapping, Threading, Precision Measurements, and General ToolmakingRating: 5 out of 5 stars5/5 (2)
- Wood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingFrom EverandWood Turning - The Lathe and Its Accessories, Tools, Turning Between Centres Face-Plate Work, Boring, PolishingNo ratings yet
- Topic1-Introduction To Gears PDFDocument55 pagesTopic1-Introduction To Gears PDFimranNo ratings yet
- GearsDocument70 pagesGearsJayesh NayakantiNo ratings yet
- Bearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsFrom EverandBearings And Bearing Metals: A Treatise Dealing with Various Types of Plain Bearings, the Compositions and Properties of Bearing Metals, Methods of Insuring Proper Lubrication, and Important Factors Governing the Design of Plain BearingsRating: 4 out of 5 stars4/5 (1)
- Gear Terminology and Its Types: Pitch CircleDocument6 pagesGear Terminology and Its Types: Pitch CircleMuhammad UmerNo ratings yet
- Gears, Types and ItsDocument22 pagesGears, Types and ItsBravo VermaNo ratings yet
- Introduction To GearsDocument28 pagesIntroduction To Gearssandeep_gaikwad2100% (4)
- Gears Design MD2Document52 pagesGears Design MD2Faizan MohyuddinNo ratings yet
- Spur Gear (Treb)Document19 pagesSpur Gear (Treb)diiivadNo ratings yet
- Power Transmission: Rotational PulleyDocument19 pagesPower Transmission: Rotational PulleyQim SvNo ratings yet
- Unit 1 - Gear Manufacturing ProcessDocument54 pagesUnit 1 - Gear Manufacturing ProcessAkash DivateNo ratings yet
- False CeilingDocument70 pagesFalse CeilingBharti Sikri93% (15)
- GEAR TRANSMISSION BASICSDocument18 pagesGEAR TRANSMISSION BASICSKrishna Kumar AlagarNo ratings yet
- UNIT-2 Design of Spur GearDocument56 pagesUNIT-2 Design of Spur GearMarthandeNo ratings yet
- ME0403 Ch2 Gear MeasurementDocument42 pagesME0403 Ch2 Gear MeasurementMANOJ M100% (1)
- GearsDocument45 pagesGearsSomendra Brijesh Pandey100% (1)
- Scor Overview v2 0Document62 pagesScor Overview v2 0Grace Jane Sinaga100% (1)
- Roda Gigi Lurus (Spur Gear) : Mott, Robert L., "Machine Elements in Mechanical Design"Document90 pagesRoda Gigi Lurus (Spur Gear) : Mott, Robert L., "Machine Elements in Mechanical Design"Sandisusanto JsNo ratings yet
- Gears Guide: Transmit Power & Change Speeds in 40 CharactersDocument55 pagesGears Guide: Transmit Power & Change Speeds in 40 CharactersIshank Singh SandhuNo ratings yet
- Collection of Books To Read Preparing For ACM ICPCDocument1 pageCollection of Books To Read Preparing For ACM ICPCJia Hong100% (2)
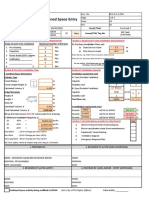
- Ventilation Plan For Confined Space EntryDocument9 pagesVentilation Plan For Confined Space EntryMohamad Nazmi Mohamad Rafian100% (1)
- GEARSDocument25 pagesGEARSamitNo ratings yet
- AGITAN Defoamer Technologies PDFDocument15 pagesAGITAN Defoamer Technologies PDFMarco Lopez100% (1)
- Chapter 4 Design of Power Transmission ElementsDocument43 pagesChapter 4 Design of Power Transmission ElementsMuhamad Arif100% (2)
- MEC 410 Chapter 8 Spring 2017Document68 pagesMEC 410 Chapter 8 Spring 2017Frederick KooNo ratings yet
- Lecture Design of Spur GearDocument97 pagesLecture Design of Spur GearOwais Ahmad KhanNo ratings yet
- GearsDocument51 pagesGearsKasi Visweswar Rao100% (1)
- Basic Mechanical Engineering (ME-405) : Machine Design GearsDocument43 pagesBasic Mechanical Engineering (ME-405) : Machine Design GearsUnknownNo ratings yet
- Gears FundamentalDocument24 pagesGears FundamentalVIMAL ANo ratings yet
- Design of Machine Elements-II: Lecture By: - Engr Aakash Munsif Mechanical Engineering DepartmentDocument37 pagesDesign of Machine Elements-II: Lecture By: - Engr Aakash Munsif Mechanical Engineering DepartmentMuhammad Mubashar FareedNo ratings yet
- GearDocument26 pagesGearRadhika GandhiNo ratings yet
- Gear & Gear TrainDocument20 pagesGear & Gear Trainniaz kilamNo ratings yet
- Chapter 4-Gears and Gear TrainsDocument93 pagesChapter 4-Gears and Gear TrainssahilrajpootasusNo ratings yet
- ME324 Lecture5Document66 pagesME324 Lecture5Jam Maica TuboNo ratings yet
- Unit - 4Document85 pagesUnit - 4Shriparno deyNo ratings yet
- GEAR AND GEAR TRAINDocument23 pagesGEAR AND GEAR TRAINingridNo ratings yet
- Gear and Screw Thread MetrologyDocument34 pagesGear and Screw Thread Metrologykunj ranaNo ratings yet
- Chapter 4 Part 1Document37 pagesChapter 4 Part 1Izzat FakhriNo ratings yet
- Chapter 9 - Sections 9.1-9.5Document26 pagesChapter 9 - Sections 9.1-9.5hanihamoud05No ratings yet
- GearDocument19 pagesGearArul DossNo ratings yet
- Gears: Syed Shaheer Uddin Ahmed Lecturer, MPEDocument15 pagesGears: Syed Shaheer Uddin Ahmed Lecturer, MPEimranNo ratings yet
- Chapter 3 GEAR M&MDocument51 pagesChapter 3 GEAR M&MSYEDA VANIZA NAVED STUDENTNo ratings yet
- GEAR HOBBING: THE PROCESS OF CUTTING GEARSDocument6 pagesGEAR HOBBING: THE PROCESS OF CUTTING GEARSShubhamNo ratings yet
- GearsDocument48 pagesGearsIshrita SaxenaNo ratings yet
- Theory of Gears and Gear TrainsDocument17 pagesTheory of Gears and Gear TrainsSumit KumarNo ratings yet
- Gear Measurement and TestingDocument52 pagesGear Measurement and TestingHemanth Kumar MadhuNo ratings yet
- Gears PDFDocument45 pagesGears PDFSanmukh ShindeNo ratings yet
- KDM UNIT-2 Gears - Gear TrainsDocument11 pagesKDM UNIT-2 Gears - Gear TrainsAchyuth KrishnaNo ratings yet
- Gears: Gear Types: Spur Gears Are The Most Common Type of GearsDocument3 pagesGears: Gear Types: Spur Gears Are The Most Common Type of GearsSheikh SaadullahNo ratings yet
- BET 120 Gear PresentationDocument31 pagesBET 120 Gear PresentationBakht AliNo ratings yet
- 06 GearsDocument22 pages06 GearsTeaching ClubNo ratings yet
- Cutting of Spur Gear and Bevel GearDocument25 pagesCutting of Spur Gear and Bevel GearJay EmNo ratings yet
- Spur GearDocument27 pagesSpur GearOmar BadawaNo ratings yet
- Basic Gear Fundamentals R1Document29 pagesBasic Gear Fundamentals R1JuanNo ratings yet
- 7 Gears: 7.1 Gear ClassificationDocument15 pages7 Gears: 7.1 Gear ClassificationSimrit Kaur MakanNo ratings yet
- Chapter 4 Mechanical Element 1 - Gear Part 1 PDFDocument34 pagesChapter 4 Mechanical Element 1 - Gear Part 1 PDFKimin MonNo ratings yet
- Turning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.From EverandTurning and Boring A specialized treatise for machinists, students in the industrial and engineering schools, and apprentices, on turning and boring methods, etc.No ratings yet
- PrefDocument3 pagesPrefapi-3774614No ratings yet
- 18Document39 pages18api-3774614No ratings yet
- IndxDocument10 pagesIndxapi-3774614No ratings yet
- Reaction Types: PrefaceDocument8 pagesReaction Types: Prefaceapi-3774614No ratings yet
- 15Document15 pages15api-3774614No ratings yet
- EsterificationDocument5 pagesEsterificationapi-3774614No ratings yet
- 23Document24 pages23api-3774614100% (1)
- Water GasDocument17 pagesWater Gasapi-3774614No ratings yet
- 24Document14 pages24api-3774614No ratings yet
- Condensation and AdditionDocument4 pagesCondensation and Additionapi-3774614No ratings yet
- Quinoline: Iso-Quinoline ( 95% Pure) Can Be Isolated by Treating A Crude FractionDocument11 pagesQuinoline: Iso-Quinoline ( 95% Pure) Can Be Isolated by Treating A Crude Fractionapi-3774614No ratings yet
- 14Document9 pages14api-3774614No ratings yet
- Chemistry of Salicylic Acid and Aspirin ProductionDocument58 pagesChemistry of Salicylic Acid and Aspirin Productionapi-3774614No ratings yet
- Kerosene: Kerosene (Kerosine, Paraffin Oil Approximately Boiling Range: 205 ToDocument17 pagesKerosene: Kerosene (Kerosine, Paraffin Oil Approximately Boiling Range: 205 Toapi-3774614100% (1)
- Lorenzo Texas AirDocument11 pagesLorenzo Texas Airapi-3774614No ratings yet
- Case Analysis Lorenzo and Texas AirDocument30 pagesCase Analysis Lorenzo and Texas Airapi-377461467% (3)
- PolymerizationDocument2 pagesPolymerizationapi-3774614No ratings yet
- 13Document12 pages13api-3774614No ratings yet
- 07Document4 pages07api-3774614No ratings yet
- Reaction TypesDocument10 pagesReaction TypesaqibazizkhanNo ratings yet
- IbuprofenDocument12 pagesIbuprofenapi-3774614100% (1)
- 11Document18 pages11api-3774614No ratings yet
- T TestsDocument6 pagesT Testsapi-3774614No ratings yet
- Chap 012Document31 pagesChap 012api-3774614No ratings yet
- Chap 011Document36 pagesChap 011api-3774614No ratings yet
- CH 14 NewDocument25 pagesCH 14 Newapi-3774614100% (1)
- CL3Document26 pagesCL3Shamsul FaisNo ratings yet
- CH 07 New 2Document24 pagesCH 07 New 2api-3774614No ratings yet
- CH 08 New 2Document18 pagesCH 08 New 2api-3774614No ratings yet
- Transmission Line Surge Impedance Loading ExplainedDocument3 pagesTransmission Line Surge Impedance Loading ExplainedviksoniNo ratings yet
- A.3s Scheme Used in Managing Epp ClassDocument35 pagesA.3s Scheme Used in Managing Epp Classpixie02100% (2)
- H07RN-F, Enhanced Version: Product InformationDocument5 pagesH07RN-F, Enhanced Version: Product InformationDarwin YupaNo ratings yet
- LD Lab ManualDocument92 pagesLD Lab ManualSunil BegumpurNo ratings yet
- BBK SMP123HDT2 SMP124HDT2 Service ManualDocument25 pagesBBK SMP123HDT2 SMP124HDT2 Service ManualdanielNo ratings yet
- Series Portable Oscilloscopes: Keysight DSO1000A/BDocument15 pagesSeries Portable Oscilloscopes: Keysight DSO1000A/BNestor CardenasNo ratings yet
- KTO12 Curriculum ExplainedDocument24 pagesKTO12 Curriculum ExplainedErnesto ViilavertNo ratings yet
- Adv - Student - HandbookDocument61 pagesAdv - Student - HandbookOmkar BezzankiNo ratings yet
- Curios AllianceDocument32 pagesCurios AllianceyesterowNo ratings yet
- Gradient of A Scalar Field and Its Geometrical InterpretationDocument3 pagesGradient of A Scalar Field and Its Geometrical InterpretationMichael100% (1)
- Middle Range TheoriesDocument134 pagesMiddle Range TheoriesMary Joyce MejiaNo ratings yet
- Design of A Neural Network Function Block For Insertion Into The Function Block Library of A Programmable Logic ControllerDocument4 pagesDesign of A Neural Network Function Block For Insertion Into The Function Block Library of A Programmable Logic ControllerArmando Fermin PerezNo ratings yet
- Logisitim CircuitDocument7 pagesLogisitim CircuitDragos ManoleaNo ratings yet
- New Membership Application GemsDocument5 pagesNew Membership Application Gemslaguila18No ratings yet
- ZF 4hp14 - 2Document9 pagesZF 4hp14 - 2Miguel BentoNo ratings yet
- Suggested For You: 15188 5 Years Ago 20:50Document1 pageSuggested For You: 15188 5 Years Ago 20:50DeevenNo ratings yet
- Line BalancingDocument21 pagesLine Balancingarno6antonio6spinaNo ratings yet
- 5 & 6 Risk AssessmentDocument23 pages5 & 6 Risk AssessmentAzam HasanNo ratings yet
- Materials Selection For Engineering DesignDocument31 pagesMaterials Selection For Engineering Designsyamsudin2006No ratings yet
- International Financial Management 7th Edition Eun Test BankDocument25 pagesInternational Financial Management 7th Edition Eun Test BankMatthewRosarioksdf100% (58)
- Load of Pedstrain On FobDocument26 pagesLoad of Pedstrain On FobPOOJA VNo ratings yet
- Pointer C++ (UAMD)Document6 pagesPointer C++ (UAMD)SaiDj DulevicNo ratings yet
- 5 Overview PsasDocument19 pages5 Overview Psasعلي صالحNo ratings yet
- Kamran Afzal ResumeDocument2 pagesKamran Afzal ResumeChelsea ElizabethNo ratings yet