You might also like
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- 8051 Timers: Microcontroller and ApplicationsDocument7 pages8051 Timers: Microcontroller and ApplicationsKaushal FaujdarNo ratings yet
- Timers and Interrupts ExperimentDocument7 pagesTimers and Interrupts ExperimentPrakash PrasadNo ratings yet
- Faculty of EngineeringDocument20 pagesFaculty of EngineeringMohammed AliNo ratings yet
- Module 4 MC 18EC46 Timer CounterDocument19 pagesModule 4 MC 18EC46 Timer Counterkirthi bharadwajNo ratings yet
- Unit-III 8051 Timers, Interrupts and Serial Communication: TH/TL (Timer High/ Timer Low)Document19 pagesUnit-III 8051 Timers, Interrupts and Serial Communication: TH/TL (Timer High/ Timer Low)Rushikesh NandeNo ratings yet
- Basics of Interrupts.: Steps Taken by Processor While Processing An InterruptDocument10 pagesBasics of Interrupts.: Steps Taken by Processor While Processing An InterruptAmy OliverNo ratings yet
- Difference Between Timers and CounterDocument5 pagesDifference Between Timers and CounterAmit ChauhanNo ratings yet
- 8051 CH9 950217Document103 pages8051 CH9 950217Amardeep PotdarNo ratings yet
- MicrocontrollerDocument53 pagesMicrocontrollerMoumita Bera100% (3)
- Answer Scheme (I) A) - Which Are The Two Basic Registers of The Timer? Explain TMOD Register Bitwise. (6marks)Document6 pagesAnswer Scheme (I) A) - Which Are The Two Basic Registers of The Timer? Explain TMOD Register Bitwise. (6marks)vishwanath81No ratings yet
- 8051 Timer CounterDocument8 pages8051 Timer Countermuralimunraj100% (1)
- 8051 TimersDocument17 pages8051 Timersfcmandi100% (1)
- 8051 Tutorial: Timers: How Does A Timer Count?Document8 pages8051 Tutorial: Timers: How Does A Timer Count?Heyang LiuNo ratings yet
- CSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Document17 pagesCSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Santosh Kumar GowdaNo ratings yet
- Book PIC Microcontrollers-Chapter 4 TimersDocument13 pagesBook PIC Microcontrollers-Chapter 4 TimersHammamiSalahNo ratings yet
- Lesson 14Document18 pagesLesson 14satsoexNo ratings yet
- Lect 19 F ETDocument11 pagesLect 19 F ETAbhiJeetSinh GhariyaNo ratings yet
- IS AK MPMC Questions Bank2Document40 pagesIS AK MPMC Questions Bank2Disha GoelNo ratings yet
- Timers and Counters Interfacing With 8051Document12 pagesTimers and Counters Interfacing With 8051Faizan RajNo ratings yet
- 8051 Timer CounterDocument98 pages8051 Timer CounterpremNo ratings yet
- Lect 03-2022-10!24!8051 Counter and TimerDocument5 pagesLect 03-2022-10!24!8051 Counter and Timerahmed alhammadNo ratings yet
- 8051 Timers and Serial Port: Module - 4Document16 pages8051 Timers and Serial Port: Module - 4Pate VishnuNo ratings yet
- Timeri 8051 MikroE EngDocument13 pagesTimeri 8051 MikroE EngDarko TopićNo ratings yet
- Microcontroller 8051 Programming in CDocument22 pagesMicrocontroller 8051 Programming in CM.K50% (2)
- Module 4Document22 pagesModule 4Rohit AnejaNo ratings yet
- 8051 Timers and Counters: Timer0 Registers Is A 16 Bits Register and Accessed As Low Byte and High Byte. The Low Byte IsDocument4 pages8051 Timers and Counters: Timer0 Registers Is A 16 Bits Register and Accessed As Low Byte and High Byte. The Low Byte IsSHubhamNo ratings yet
- Theory of EDsim 51Document8 pagesTheory of EDsim 51anshulkumarjaiswalNo ratings yet
- The 8051Document29 pagesThe 8051Rabia SaeedNo ratings yet
- Es 2Document26 pagesEs 2vamsi kiranNo ratings yet
- 8051 TimersDocument20 pages8051 TimersRohitNo ratings yet
- Timers, Serial Port & Interrupts in 8051Document51 pagesTimers, Serial Port & Interrupts in 8051Sureka N Assistant Professor - ECENo ratings yet
- Timer ProgrammingDocument42 pagesTimer ProgrammingNeal MeyerNo ratings yet
- Real Timer ControlDocument94 pagesReal Timer ControlSai Krishna KodaliNo ratings yet
- Unit 5-Typed NotesDocument34 pagesUnit 5-Typed NotesAparna durairajNo ratings yet
- Hardware Features of 8051Document52 pagesHardware Features of 8051Manjunath Shimoga100% (1)
- 8051 Tutorial: Timers: How Does A Timer Count?Document6 pages8051 Tutorial: Timers: How Does A Timer Count?Sujy CauNo ratings yet
- Class 5 Timer HandoutDocument12 pagesClass 5 Timer Handoutlok171962No ratings yet
- BooksDocument14 pagesBookssravyaNo ratings yet
- 7-Timers and CountersDocument3 pages7-Timers and CountersKalidindi Puneeth100% (1)
- Mci 8Document7 pagesMci 8Het PatelNo ratings yet
- 5 Timer (Part 1)Document29 pages5 Timer (Part 1)lsuwdaa100% (1)
- 8051-CH9-TimePmg in Assem & CDocument101 pages8051-CH9-TimePmg in Assem & CshivaspyNo ratings yet
- TimersDocument17 pagesTimers87krishna331No ratings yet
- Timers CountersDocument25 pagesTimers CountersajaykumarnotomNo ratings yet
- Ec8691 Unit V - PPTDocument36 pagesEc8691 Unit V - PPTVinothkumar UrumanNo ratings yet
- Microcontroller TimersDocument42 pagesMicrocontroller TimersPatel NeelNo ratings yet
- Microcontroller (1) Lab Manual: University of Science &technolegy Facualty of Engneering BiomedicalDocument23 pagesMicrocontroller (1) Lab Manual: University of Science &technolegy Facualty of Engneering BiomedicalIyyaasuu YaadataaNo ratings yet
- Ec8691 Unit VDocument36 pagesEc8691 Unit V19CS038 HARIPRASADRNo ratings yet
- Lecture 8: TimersDocument3 pagesLecture 8: Timersvtech247No ratings yet
- TimerDocument29 pagesTimerhanhdoducNo ratings yet
- Delay Using 8051 TimerDocument6 pagesDelay Using 8051 TimerDK White LionNo ratings yet
- 8051 Microcontroller FeaturesDocument42 pages8051 Microcontroller FeaturesTech_MX67% (3)
- Lecture 55Document8 pagesLecture 55Anuj SainiNo ratings yet
- 8051 Timers and CountersDocument11 pages8051 Timers and CountersVenkata Konda Reddy MulleNo ratings yet
- Parul Institute of Engineering & Technology: Subject Code:-151001 Name of Subject: - Microcontroller and InterfacingDocument35 pagesParul Institute of Engineering & Technology: Subject Code:-151001 Name of Subject: - Microcontroller and InterfacingSiva CharanNo ratings yet
- SECA3019 - Embedded Processors Lecture 2.3 Timers in ATMEGA328Document18 pagesSECA3019 - Embedded Processors Lecture 2.3 Timers in ATMEGA328sugadev74No ratings yet
- TMOD and TCON RegistersDocument4 pagesTMOD and TCON RegistersAmit ChauhanNo ratings yet
- Practical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationFrom EverandPractical Reverse Engineering: x86, x64, ARM, Windows Kernel, Reversing Tools, and ObfuscationNo ratings yet
- Lab 3 Onwards Micro AssignmentsDocument3 pagesLab 3 Onwards Micro AssignmentsShashank M ChanmalNo ratings yet
- Software Testing: Chapter 1 and 4 From Ian Sommerville, 8 EditionDocument2 pagesSoftware Testing: Chapter 1 and 4 From Ian Sommerville, 8 EditionShashank M ChanmalNo ratings yet
- Language FundamentalsDocument34 pagesLanguage FundamentalsShashank M ChanmalNo ratings yet
- Resume Format & Registration FormDocument1 pageResume Format & Registration FormShashank M ChanmalNo ratings yet
- DSP Assignment (Full)Document10 pagesDSP Assignment (Full)Shashank M ChanmalNo ratings yet
- (Solutions Manual) Communication Systems 4Th Edition Simon HaykinDocument1,397 pages(Solutions Manual) Communication Systems 4Th Edition Simon HaykinPablo Montes0% (1)
- Signals & Systems EC403Document3 pagesSignals & Systems EC403Shashank M ChanmalNo ratings yet
- Pci Local Bus: Peripheral Component Interconnect (PCI)Document61 pagesPci Local Bus: Peripheral Component Interconnect (PCI)Shashank M ChanmalNo ratings yet
- Explain The Differences Between The Following: A) RISC and CISC Processors B) Harvard and Von-Neumann ArchitecturesDocument45 pagesExplain The Differences Between The Following: A) RISC and CISC Processors B) Harvard and Von-Neumann ArchitecturesShashank M ChanmalNo ratings yet
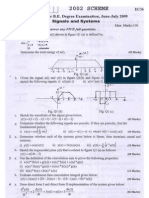
- Signals and Sys - 2002 - Ec36 - Jun 09Document2 pagesSignals and Sys - 2002 - Ec36 - Jun 09Shashank M ChanmalNo ratings yet
- Bus Comparisons: Bus Type Bus Width Bus Speed MB/se CDocument13 pagesBus Comparisons: Bus Type Bus Width Bus Speed MB/se CShashank M ChanmalNo ratings yet
- 8086 Programs-Semester 4Document40 pages8086 Programs-Semester 4Shashank M ChanmalNo ratings yet
- Micro Controller LabDocument33 pagesMicro Controller LabberihuteNo ratings yet
- Signals & SystemsDocument2 pagesSignals & SystemsShashank M ChanmalNo ratings yet
- Data Strs Using CDocument4 pagesData Strs Using CShashank M ChanmalNo ratings yet
- MicroprocessorsDocument2 pagesMicroprocessorsShashank M ChanmalNo ratings yet
- Signals & Systems EC403Document2 pagesSignals & Systems EC403Shashank M ChanmalNo ratings yet
- Engg MathsCSMAT41Document4 pagesEngg MathsCSMAT41Shashank M ChanmalNo ratings yet
- Fundamentals of HDL May Jun 010Document1 pageFundamentals of HDL May Jun 010Shashank M ChanmalNo ratings yet
- Fundls of Verilog HDLDocument2 pagesFundls of Verilog HDLShashank M ChanmalNo ratings yet
- Data Strs Using C EC401Document2 pagesData Strs Using C EC401Shashank M ChanmalNo ratings yet
- Maths Question BankDocument4 pagesMaths Question BankShashank M ChanmalNo ratings yet
- Engg Maths IV - CSMAT41 - 2010Document4 pagesEngg Maths IV - CSMAT41 - 2010Shashank M ChanmalNo ratings yet
- Microprocessors EC405Document2 pagesMicroprocessors EC405Shashank M ChanmalNo ratings yet
- Schneider ElectricDocument3 pagesSchneider ElectricShashank M ChanmalNo ratings yet
- Microprocessors 2Document14 pagesMicroprocessors 2Shashank M ChanmalNo ratings yet
- Microprocessors 2Document14 pagesMicroprocessors 2Shashank M ChanmalNo ratings yet
- Microprocessors 1Document2 pagesMicroprocessors 1Shashank M ChanmalNo ratings yet
- Microprocessors 2Document14 pagesMicroprocessors 2Shashank M ChanmalNo ratings yet
- CF1200(英文说明书)新款 08Document1 pageCF1200(英文说明书)新款 08dashdoggNo ratings yet
- Design Optimization For High-Performance Computing Using FPGADocument19 pagesDesign Optimization For High-Performance Computing Using FPGAheartdreamplusNo ratings yet
- Programmable 3 Channel Power Supply 526Document2 pagesProgrammable 3 Channel Power Supply 526digiarkanandNo ratings yet
- MCLab Manual FinalDocument58 pagesMCLab Manual FinalSaikrishnaNo ratings yet
- JZ4770 - Board - Design Guide - EN PDFDocument43 pagesJZ4770 - Board - Design Guide - EN PDFlathifkhanNo ratings yet
- Soft Dev Fund PPT 1.1Document15 pagesSoft Dev Fund PPT 1.1kartikrao31No ratings yet
- ĐỀ 1 - RCDocument30 pagesĐỀ 1 - RCLương Hữu TàiNo ratings yet
- ITDOCDocument26 pagesITDOCManav Chawla100% (1)
- Compal La-4141p r1.0 Schematics PDFDocument53 pagesCompal La-4141p r1.0 Schematics PDFJagopati Jr.No ratings yet
- The UniversimDocument2 pagesThe UniversimGhazisNo ratings yet
- Asus Product Guide: The World's Smallest 14" LaptopsDocument23 pagesAsus Product Guide: The World's Smallest 14" LaptopsAgent of ChangeNo ratings yet
- Poriyaan 1cmfA62QmpEUSssZeK 4a3Lq-KUrzO1jADocument171 pagesPoriyaan 1cmfA62QmpEUSssZeK 4a3Lq-KUrzO1jAS. GobikaNo ratings yet
- SR Flip-Flop With Tristate OutputDocument12 pagesSR Flip-Flop With Tristate OutputmamimawNo ratings yet
- Demand Paging & Page Replacement AlgorithmDocument5 pagesDemand Paging & Page Replacement AlgorithmAmudha ShanmugamNo ratings yet
- 8051 Micro Controller TrainerDocument2 pages8051 Micro Controller Trainerkira_yamato999999542No ratings yet
- Octal Transparent Latch With 3-State Outputs Octal D-Type Flip-Flop With 3-State Output SN54/74LS373 SN54/74LS374Document2 pagesOctal Transparent Latch With 3-State Outputs Octal D-Type Flip-Flop With 3-State Output SN54/74LS373 SN54/74LS374Miyuki_22No ratings yet
- A01 20230116121500Document5 pagesA01 20230116121500khoiriyahmz emisNo ratings yet
- 計概Q3Document43 pages計概Q3楊喻妃No ratings yet
- Chapter 2 SummaryDocument6 pagesChapter 2 SummaryReymond Sta AnaNo ratings yet
- Deployment Guide Supply Chain Guru Product Family: Release R30.0.0Document44 pagesDeployment Guide Supply Chain Guru Product Family: Release R30.0.0Ramkrishna GhagNo ratings yet
- BRKUCC-2011 Best Practices For Migrating Previous Versions of Cisco Unified Communications Manager (CUCM) To CUCM 8.6Document112 pagesBRKUCC-2011 Best Practices For Migrating Previous Versions of Cisco Unified Communications Manager (CUCM) To CUCM 8.6drineNo ratings yet
- 01 MS 1491 v1.0 EnglishDocument112 pages01 MS 1491 v1.0 EnglishddddkkkkNo ratings yet
- 8085 Pin Diagram and ArchitectureDocument8 pages8085 Pin Diagram and ArchitectureSneha SinghNo ratings yet
- 088 S 12 - Technical Info ACE Automatic Computerized OedometerDocument4 pages088 S 12 - Technical Info ACE Automatic Computerized OedometerDom MonyNo ratings yet
- ATX and P4 Power Supplies PDFDocument6 pagesATX and P4 Power Supplies PDFvladareanucatalindanNo ratings yet
- Enclosures and Expansion Units: Power SystemsDocument92 pagesEnclosures and Expansion Units: Power SystemsjohnwooderNo ratings yet
- VXVM Troubleshooting ToiDocument40 pagesVXVM Troubleshooting ToiamanullaNo ratings yet
- A+ 8GBDocument3 pagesA+ 8GBwe ExtenNo ratings yet
- KQCPET6 ManualDocument46 pagesKQCPET6 ManualFlavianoSilvaNo ratings yet
- Cs 310Document377 pagesCs 310avira proNo ratings yet