Professional Documents
Culture Documents
Electromagnetismo Numerico
Uploaded by
zaazlxOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Electromagnetismo Numerico
Uploaded by
zaazlxCopyright:
Available Formats
Resolucion numerica de campos
electromagneticos
Julian Barqun
ii
Prefacio
El proposito de este escrito es servir de apoyo al laboratorio de metodos numeri-
cos de la asignatura de Electrotecnia I de la Escuela Tecnica Superior de Inge-
niera Industrial de la Universidad Ponticia Comillas.
Por otra parte, se ha intentado incluir no solamente el material que se impar-
te en esta asignatura, sino tambien material adicional que pueda ser de utilidad
en cursos superiores. Se ha diferenciado estos dos tipos de materiales se nalando-
les como basico y avanzado.
En este texto no se trata de los aspectos fsicos de las ecuaciones tratadas, lo
que es, por supuesto, la preocupacion principal en la asignatura de Electrotec-
nia I. En cambio, si que se incluye un captulo (el segundo) sobre la resolucion
numerica de sistemas lineales. Aunque este tema debiera serle familiar a los
alumnos al nalizar el segundo curso, no lo es todava cuando comienza el labo-
ratorio de metodos numericos, por lo que unas ligeras nociones preliminares son
deseables. Por otra parte, creo que es util que tengan una peque na descripcion
de los algoritmos utiles en la resolucion de las ecuaciones de campo.
Tras este captulo, el tercero trata de la resolucion de la ecuacion de Poisson
mediante diferencias nitas, y el cuarto mediante elementos nitos. En el quinto
se estudian otras ecuaciones elpticas de interes en electromagnetismo.
El sexto captulo aborda el tratamiento de la ecuacion de difusion, y el ultimo
de su resolucion en regimen senoidal.
No se han tratado ecuaciones hiperbolicas. La razon es que estas ecuaciones
no se tratan en la asignatura con el detenimiento de las elpticas o las paraboli-
cas, tanto por el (muy relativo) menor interes tecnico, como porque se estudian
con menos intensidad en segundo curso, debido, entre otras cosas, a que los
alumnos todava no han visto analisis de Fourier.
Madrid, octubre de 1996.
iii
iv
Indice general
1 Introduccion 1
2 Resolucion de sistemas lineales 3
2.1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.2 Metodo directo: la factorizacion LU . . . . . . . . . . . . . . . . . 5
2.2.1 Factorizacion LU de matrices llenas . . . . . . . . . . . . 5
2.2.2 Factorizacion LU de matrices ralas . . . . . . . . . . . . . 9
2.3 Metodos iterativos . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3.1 Los metodos de Jacobi y Gauss-Seidel . . . . . . . . . . . 11
2.3.2 El metodo de la sobrerrelajacion sucesiva . . . . . . . . . 17
2.4 Metodos semidirectos: el gradiente conjugado . . . . . . . . . . . 19
3 Ecuaciones de Laplace y Poisson: diferencias nitas 27
3.1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Preliminares matematicos . . . . . . . . . . . . . . . . . . . . . . 28
3.3 Construccion de la malla y planteamiento de las ecuaciones . . . 29
3.4 El principio del maximo . . . . . . . . . . . . . . . . . . . . . . . 33
3.5 Errores y convergencia . . . . . . . . . . . . . . . . . . . . . . . . 34
3.5.1 Anexo: prueba del teorema . . . . . . . . . . . . . . . . . 36
3.6 Problemas con los contornos . . . . . . . . . . . . . . . . . . . . . 38
3.6.1 Condiciones de von Neumann no nulas . . . . . . . . . . . 38
3.6.2 Tratamiento de contornos curvos . . . . . . . . . . . . . . 39
3.7 Diferencias nitas en otros sistemas coordenados . . . . . . . . . 40
3.7.1 Diferencias nitas en coordenadas polares . . . . . . . . . 41
3.7.2 Diferencias nitas con simetra axial . . . . . . . . . . . . 41
4 Ecuaciones de Laplace y Poisson: elementos nitos 45
4.1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
4.2 Forma variacional de la ecuacion de Poisson . . . . . . . . . . . . 45
4.3 Aproximacion funcional . . . . . . . . . . . . . . . . . . . . . . . 48
4.3.1 Un ejemplo . . . . . . . . . . . . . . . . . . . . . . . . . . 51
4.4 Nomenclatura y propiedades . . . . . . . . . . . . . . . . . . . . . 54
4.5 El espacio de funciones admisibles . . . . . . . . . . . . . . . . . 55
4.6 Elementos nitos triangulares . . . . . . . . . . . . . . . . . . . . 58
v
vi
INDICE GENERAL
4.7 Otros elementos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.8 Errores y convergencia . . . . . . . . . . . . . . . . . . . . . . . . 66
4.9 Elementos nitos y diferencias nitas . . . . . . . . . . . . . . . . 69
5 Otros problemas estaticos 71
5.1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.2 Corrientes estacionarias . . . . . . . . . . . . . . . . . . . . . . . 71
5.3 Magnetostatica en medios lineales . . . . . . . . . . . . . . . . . 72
5.4 Magnetostatica no lineal . . . . . . . . . . . . . . . . . . . . . . . 76
5.4.1 Planteamiento de la forma variacional . . . . . . . . . . . 76
5.4.2 Resolucion numerica de la forma variacional . . . . . . . . 78
6 La ecuacion de difusion 83
6.1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
6.2 La ecuacion de difusion en 1 dimension . . . . . . . . . . . . . . . 84
6.3 Resolucion de las ecuaciones . . . . . . . . . . . . . . . . . . . . . 86
6.3.1 Metodo explcito clasico . . . . . . . . . . . . . . . . . . . 87
6.3.2 Metodo implcito clasico . . . . . . . . . . . . . . . . . . . 88
6.3.3 Metodo de Crank-Nicholson . . . . . . . . . . . . . . . . . 89
6.4 Estabilidad de la solucion . . . . . . . . . . . . . . . . . . . . . . 91
6.5 Convergencia de los algoritmos . . . . . . . . . . . . . . . . . . . 94
6.6 Elementos nitos y la ecuacion de difusion . . . . . . . . . . . . . 97
7 Problemas armonicos 101
7.1 Introduccion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101
7.2 Notacion compleja . . . . . . . . . . . . . . . . . . . . . . . . . . 102
7.3 Difusion magnetica e histeresis . . . . . . . . . . . . . . . . . . . 104
Captulo 1
Introduccion
Hace ya mas de 200 a nos, Leonard Euler, de quien dicen que jamas dejaba
de calcular
1
, decidio abordar el problema del ujo del agua. El conoca las
ecuaciones de Newton, y saba como aplicarlas a partculas o solidos rgidos.
En estos casos, el estado del sistema fsico esta descrito por un n umero nito
de cantidades: las posiciones y las velocidades de las partculas, o la posicion y
velocidad del centro de masas junto con la orientacion del cuerpo y su velocidad
angular. No as con el agua: para denir su estado se necesita saber la velocidad
de cada partcula.
Matematicamente, su estado se puede representar mediante el campo de
velocidades v(x, y, z). Euler logro derivar una ecuacion que relacionaba el cambio
de la velocidad con el tiempo con su cambio en el espacio, una ecuacion en
derivadas parciales, o una ecuacion de campo.
100 a nos despues, James Maxwell logro dar forma matematica a las ideas
de Michel Farady sobre las leyes del campo electromagnetico. De nuevo se en-
contro con ecuaciones en derivadas parciales, que en teora permitiran calcular
los campos electrico E(x, y, z) y magnetico B(x, y, z).
Este fue, sin duda alguna
2
, el hecho mas importante del siglo XIX, el comien-
zo de la era electrica. Durante los a nos siguientes, el nal del siglo XIX y el siglo
XX, los ingenieros aplicaran estas ecuaciones en un n umero creciente de dispo-
sitivos. Sin embargo, es curioso de que, salvo en raras ocasiones, no las resolvan:
las simplicaban. La razon, por supuesto, es que no se saba resolverlas, salvo
en casos de una extrema idealizacion.
Hoy la situacion es distinta. La razon es que la aparicion de los ordenado-
res (lejanos descendientes de Farady y Maxwell, por otra parte) permiten la
resolucion de grandes sistemas de ecuaciones algebraicas. Este escrito trata, por
tanto, de la aproximacion de ecuaciones en derivadas parciales por ecuaciones
algebraicas.
En electromagnetismo, casi todas las ecuaciones de interes tienen un mismo
aspecto: son ecuaciones de segundo orden. Por ejemplo, en dos dimensiones
1
De hecho, murio rico.
2
Y que digan lo que quieran.
1
2 CAP
ITULO 1. INTRODUCCI
ON
toman la forma:
a
x
2
+b
2
xy
+c
y
2
+d
x
+e
y
+f +g = 0 (1.1)
donde a, b, c, d, e, f y g son funciones conocidas de x e y, y es la funcion (el
campo) a resolver. El caracter cualitativo de la solucion depende, sin embargo,
de los coecientes de los terminos de segundo orden: a, b y c. En concreto:
b
2
4ac < 0. Se llaman ecuaciones elpticas. Describen situaciones de
equilibrio, como el potencial electrico en problemas electrostaticos, o las
tensiones mecanicas en una viga.
b
2
4ac = 0. Son ecuaciones parabolicas. Describen fenomenos de difusion,
tales como la conduccion del calor, o el efecto pelicular en conductores.
b
2
4ac > 0. Se trata de las ecuaciones hiperbolicas. Describen campos
que se propagan a una velocidad dada, tales como el sonido o la luz.
Es curioso constatar como comportamientos tan diferentes dependen de mo-
dicaciones aparentemente tan peque nas en la ecuacion. De todas formas, aqu se
trataran tan solo los dos primeros tipos de ecuaciones.
Captulo 2
Resolucion de sistemas
lineales
_ B asico
2.1 Introduccion
La mayor parte de este escrito trata sobre la forma en que las ecuaciones de
campo son aproximadas por sistemas de ecuaciones algebraicas. Estos sistemas
son muy a menudo sistemas lineales. Cuando no son sistemas lineales, su reso-
lucion suele requerir la de varios sistemas lineales. Por todo ello, las tecnicas
numericas de resolucion de estos sistemas son de una importancia crucial.
El tratamiento sistematico de estos procedimientos hace muy conveniente,
de hecho casi imprescindible, el que estos sistemas lineales se planteen de forma
matricial. As pues, se puede reescribir el parrafo anterior diciendo que este
captulo trata de la resolucion del sistema
Ax = b (2.1)
A, la matriz del sistema, es una matriz cuadrada que depende de la ecuacion
a resolver y, naturalmente, del metodo escogido. El termino independiente b
depende del valor de las condiciones de contorno y de la densidad de carga (o
de fuerzas volumetricas, o de generacion de calor) dentro del dominio. x es,
naturalmente, la incognita, los valores del campo.
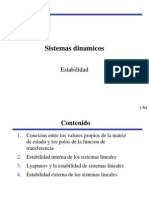
Una caracterstica muy importante de la matriz A es que casi todos sus
elementos son nulos. Por ejemplo, la gura 2.1 muestra la malla de elementos
nitos utilizada para analizar el ujo alrededor del ala de un avion y la matriz
A que tiene asociada. Se ha dibujado un punto en la posicion de todos los
elementos de la matriz cuyo valor es distinto de cero. Observese que exigua
minora constituyen.
Una matriz con esta caracterstica es llamada rala o cuasivaca
1
. Esta carac-
terstica ofrece la posibilidad de tratar matrices de mucha mayor dimension de
1
En ingles, sparse. Cierta similitud fonetica parece haber llevado en ocasiones a traducirlo
(erroneamente) como dispersa.
3
4 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 500 1000 1500 2000 2500 3000 3500 4000
0
500
1000
1500
2000
2500
3000
3500
4000
nz = 28831
The adjacency matrix.
Figura 2.1: Ala de avion, su malla y su matriz asociadas.
lo que sera de otra forma posible. Por ejemplo, es posible almacenar solamente
los elementos que sean distintos de cero, junto con sus posiciones. En el caso de
la matriz del ejemplo, de dimension 1700 y con 3500 elementos no nulos, no es
necesario almacenar 1700 1700 = 3, 500, 000 posiciones de memoria, sino que
bastan con 3500 3 = 10,500 posiciones (1 para el valor del elemento y dos
para su posicion en la matriz).
De hecho, no es solamente la necesidad de memoria la que se puede reducir
de una forma muy marcada, sino tambien el tiempo de computo requerido.
Son as las tecnicas de resolucion de sistemas ralos las que hacen posibles el
tratamiento de problemas que no sean de dimension muy reducida.
Existen tres tipos de metodos fundamentales para la resolucion de sistemas
lineales: los directos, los iterativos y los semidirectos.
Los metodos directos resuelven las ecuaciones en un n umero nito de pa-
sos. Los metodos iterativos van mejorando una estimacion inicial de la solucion
(a menudo x = 0), aunque sin llegar jamas a la solucion exacta. Tienen, sin
embargo, menores requerimientos de memoria que los metodos directos. Los se-
midirectos pueden, en principio, resolver tambien el sistema en un n umero nito
de pasos, pero en su planteamiento y analisis son mas parecidos a los iterativos.
El resto del captulo explicara alg un metodo, o algunos metodos, pertene-
cientes a cada categora. Son, de todas formas, los mas usados en la resolucion
numerica de campos.
2.2. M
ETODO DIRECTO: LA FACTORIZACI
ON LU 5
2.2 Metodo directo: la factorizacion LU
B asico
_ Avanzado
Un metodo directo es un metodo que alcanza la solucion tras un n umero nito
de pasos. De todos ellos, el mas empleado en el problema que aqu se trata es una
generalizacion del metodo de eliminacion de Gauss conocida como factorizacion
LU.
En el resto de la seccion se explica la factorizacion de Gauss en el contexto
de las matrices llenas. Despues se exponen las modicaciones necesarias para su
aplicacion a matrices ralas.
2.2.1 Factorizacion LU de matrices llenas
La eliminacion de Gauss (y la factorizacion LU) se basan en una observacion
aparentemente trivial: es muy facil resolver un sistema lineal cuando la matriz
A es triangular. En efecto, si se tiene un sistema como
_
_
2 0 0 0
3 1 0 0
4 0 3 0
7 1 0 4
_
_
_
_
x
1
x
2
x
3
x
4
_
_
=
_
_
3
1
5
0
_
_
(2.2)
se puede resolver primero x
1
de la primera ecuacion (la primera la), conocido x
1
se resuelve x
2
de la segunda, conocidos x
1
y x
2
se puede resolver x
3
de la tercera,
y as sucesivamente. Evidentemente, se puede proceder as porque la matriz del
sistema tiene elementos no nulos solamente por debajo de la diagonal principal
(los elementos a
ij
, con i j). Si la matriz fuera triangular superior (elementos
no nulos solamente por encima de la diagonal superior) se podra proceder de
la misma forma, salvo que se tendra que comenzar por la ultima componente
de x, en vez de por la primera (compruebese!).
Esta observacion no dejara de ser trivial sino fuera por que toda matriz A
no singular se puede escribir como el producto de una matriz triangular inferior
por una superior:
A = LU (2.3)
Es costumbre denotar al factor triangular inferior por L (del ingles lower) y
al superior por U (de upper). La factorizacion LU es, esencialmente, el procedi-
miento de calculo de estos dos factores a partir de la matriz A.
Supongase entonces que se ha logrado calcular L y U. Ahora la resolucion
del sistema Ax = b es inmediata. En efecto, este sistema es equivalente a
LUx = b (2.4)
Consideremos tambien el sistema
Ly = b (2.5)
Como este es un sistema triangular inferior, es facil de resolver. La solucion
es y = L
1
b. Ademas, de la ecuacion (2.4)
6 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
Ux = L
1
b = y (2.6)
Pero esto vuelve a ser una ecuacion con matriz triangular!. Como y es
conocida (se ha resuelto (2.5)), es ahora facil calcular x.
En resumen, se han resuelto sucesivamente los sistemas
Ly = b (2.7)
Ux = y (2.8)
El primer sistema es triangular inferior, luego las incognitas se resuelven
iendo de la primera a la ultima. El segundo es triangular superior, en el que las
incognitas se resuelven de la ultima a la primera. Es por esto que el procedi-
miento completo se conoce por la substitucion hacia delante y hacia atras.
El problema que queda es, naturalmente, el calculo de los factores L y U.
Es esta la tarea, con mucho, mas complicada y costosa del procedimiento.
La tecnica consiste en ir eliminado sucesivamente los elementos de A que se
encuentren por debajo de la diagonal. Quiza la forma mas sencilla de explicarlo
es mediante un ejemplo. Supongase as que se desea factorizar la matriz
A =
_
_
3 1 0 1
1 4 2 0
0 2 5 2
1 0 2 6
_
_
(2.9)
Considerese el elemento (2,1) (segunda la, primera columna). Este elemento
(un 1) esta por debajo de la diagonal principal e impide, por tanto, que la matriz
A sea diagonal superior. Para eliminar este elemento, se puede premultiplicar
por una triangular inferior:
_
_
1 0 0 0
l
2,1
1 0 0
0 0 1 0
0 0 0 1
_
_
_
_
3 1 0 1
1 4 2 0
0 2 5 2
1 0 2 6
_
_
=
_
_
3 1 0 1
1 l
2,1
3 4 l
2,1
2 l
2,1
0 2 5 2
1 0 2 6
_
_
(2.10)
El termino l
2,1
se escoge de manera que anule al termino (2, 1) de la nueva
matriz, es decir
1 3l
2,1
= 0 l
2,1
=
1
3
(2.11)
Luego,
_
_
1 0 0 0
1
3
1 0 0
0 0 1 0
0 0 0 1
_
_
_
_
3 1 0 1
1 4 2 0
0 2 5 2
1 0 2 6
_
_
=
_
_
3 1 0 1
0
11
3
2
1
3
0 2 5 2
1 0 2 6
_
_
(2.12)
2.2. M
ETODO DIRECTO: LA FACTORIZACI
ON LU 7
Ahora, observese que
_
_
1 0 0 0
1
3
1 0 0
0 0 1 0
0 0 0 1
_
_
1
=
_
_
1 0 0 0
1
3
1 0 0
0 0 1 0
0 0 0 1
_
_
(2.13)
En realidad, es en general cierto para todas las matrices triangulares infe-
riores formadas por una diagonal de 1s y un solo elemento adicional debajo de
la diagonal, que su inversa es ella misma salvo por el elemento adicional que
cambia signo.
Se sigue as de (2.12) que:
A =
_
_
3 1 0 1
1 4 2 0
0 2 5 2
1 0 2 6
_
_
=
_
_
1 0 0 0
1
3
1 0 0
0 0 1 0
0 0 0 1
_
_
_
_
3 1 0 1
0
11
3
2
1
3
0 2 5 2
1 0 2 6
_
_
= L
1
A
1
(2.14)
La matriz A
1
tiene todava un elemento en la primera columna por debajo de
la diagonal distinto de 0: el 1 de la cuarta la. Procediendo de manera analoga
a la anterior se tiene:
A
1
=
_
_
3 1 0 1
0
11
3
2
1
3
0 2 5 2
1 0 2 6
_
_
=
_
_
1 0 0 0
0 1 0 0
0 0 1 0
1
3
0 0 1
_
_
_
_
3 1 0 1
0
11
3
2
1
3
0 2 5 2
0
1
3
2
17
3
_
_
= L
2
A
2
(2.15)
Notese que la matriz L
2
no afecta mas que a la cuarta la de A
2
. Por tanto,
no puede cambiar los ceros de las las segunda y tercera a algo no nulo. Esto
es, naturalmente, lo que se pretende.
En todo caso, ya no hay elementos a eliminar en la primera columna de A
2
.
En la segunda columna el elemento (3, 2) es distinto de cero (2). As, se tiene:
A
2
=
_
_
3 1 0 1
0
11
3
2
1
3
0 2 5 2
0
1
3
2
17
3
_
_
=
_
_
1 0 0 0
0 1 0 0
0
6
11
1 0
0 0 0 1
_
_
_
_
3 1 0 1
0
11
3
2
1
3
0 0
43
11
24
11
0
1
3
2
17
3
_
_
= L
3
A
3
(2.16)
Hay que notar ahora que la matriz L
3
no afecta a la primera columna de A
3
.
Es por esto que se ha comenzado por eliminar la primera columna, y por lo que
una vez que se elimine la segunda se comenzara por la tercera. Las matrices Ls
que afectan a cada columna no pueden modicar las columnas anteriores.
En A
3
el elemento (4, 2) es distinto de cero. Por tanto, se elimina:
8 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
A
3
=
_
_
3 1 0 1
0
11
3
2
1
3
0 0
43
11
24
11
0
1
3
2
17
3
_
_
=
_
_
1 0 0 0
0 1 0 0
0 0 1 0
0
1
11
0 1
_
_
_
_
3 1 0 1
0
11
3
2
1
3
0 0
43
11
24
11
0 0
24
11
62
11
_
_
= L
4
A
4
(2.17)
Finalmente, solo queda eliminar el termino (4, 3) de A
4
. De aqu resulta:
A
4
=
_
_
3 1 0 1
0
11
3
2
1
3
0 0
43
11
24
11
0 0
24
11
62
11
_
_
=
_
_
1 0 0 0
0 1 0 0
0 0 1 0
0 0
24
43
1
_
_
_
_
3 1 0 1
0
11
3
2
1
3
0 0
43
11
24
11
0 0 0
2048
473
_
_
= L
5
U
(2.18)
U es una matriz triangular superior. Ahora, de todo lo anterior se sigue:
A = L
1
A
1
= L
1
L
2
A
2
= L
1
L
2
L
3
A
3
= L
1
L
2
L
3
L
4
A
4
= L
1
L
2
L
3
L
4
L
5
U (2.19)
Por otra parte, el producto de matrices triangulares inferiores es triangular
inferior. Luego L
1
L
2
L
3
L
4
L
5
es una triangular inferior que se llamara L. Es,
ademas, muy facil de calcular. En efecto
L =
_
_
1 0 0 0
1
3
1 0 0
0
6
11
1 0
1
3
1
11
24
43
1
_
_
(2.20)
Es decir, el efecto de cada L
i
es a nadir su termino fuera de la diagonal.
Esto es valido en general, para matrices L
i
como las que resultan del proceso
de factorizacion (una diagonal de 1s mas un termino fuera de diagonal).
Notese que para calcular cada matriz L
i
hay que resolver la ecuacion
l
i,(k,l)
a
i1,(l,l)
+a
i1,(k,l)
= 0 (2.21)
siendo (k, l) el termino a eliminar. Para resolver esta ecuacion en (l
i,(k,l)
es
preciso que el termino de la diagonal a
i1,(l,l)
,= 0. Este termino es llamado el
pivote. Caso de ser nulo, se puede intentar permutar la la l-esima por otra
situada mas abajo. Esto equivale a reordenar las variables del sistema lineal. Si
no hubiera ninguna permutacion que resolviera el problema (que todas dieran
pivotes nulos) es que la matriz es singular y no hay, por tanto, solucion unica.
Por otra parte, en el ejemplo que se estudia, se puede comprobar que
U =
_
_
3 1 0 1
0
11
3
2
1
3
0 0
43
11
24
11
0 0 0
2048
473
_
_
=
_
_
3 0 0 0
0
11
3
0 0
0 0
43
11
0
0 0 0
2048
473
_
_
_
_
1
1
3
0
1
3
0 1
6
11
1
11
0 0 1
24
43
0 0 0 1
_
_
= DL
T
(2.22)
2.2. M
ETODO DIRECTO: LA FACTORIZACI
ON LU 9
Luego
A = LU = LDL
T
(2.23)
Esta expresion es conocida como la factorizacion triple LDL
T
. Es posible
llevarla a cabo si la matriz A es simetrica (pruebese!). Esta simetra se pre-
senta a menudo en problemas de campos, y se puede explotar para mejorar el
procedimiento de factorizacion LU arriba explicado.
2.2.2 Factorizacion LU de matrices ralas
La factorizacion LU expuesta arriba tiene el inconveniente de que las operaciones
se realizan sobre matrices llenas, es decir, sin tener en cuenta que la mayor parte
de los elementos de la matriz son nulos.
Esencialmente, la factorizacion LU con matrices ralas procede de la misma
forma que la factorizacion con matrices llenas. Las diferencias que existen son
las siguientes:
1. Solamente se almacenan los elementos no nulos de las matrices, junto con
su localizacion. As, por ejemplo, en Matlab, la matriz:
_
_
2 1 0 0
1 2 1 0
0 1 2 1
0 0 1 2
_
_
se almacena en tres vectores, un primero que almacena los valores no
nulos, y otros dos que almacenan las posiciones (la y columna) donde se
encuentran:
( 2 1 1 2 1 1 2 1 1 2 )
( 1 1 2 2 2 3 3 3 4 4 )
( 1 2 1 2 3 2 3 4 3 4 )
Existen otras formas de codicar la posicion mas ecientes que la anterior,
aunque mas complejas.
2. Existe una logica que determina las operaciones y sumas que es preciso
realizar, saltandose todas las operaciones que consistan en multiplicar por
cero, o sumar cero. Esto es posible porque se saben los elementos que son
nulos (los que no esten codicados en los vectores anteriores).
En cualquier caso, es claro que interesa conseguir que los factores LU que
resulten tengan tantos elementos nulos como sea posible. En este sentido, el
orden que adopten las variables y ecuaciones es de crucial importancia. Por
ejemplo, considerese la matriz
10 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
A =
_
_
20 15 6 4
15 6 0 0
6 0 4 0
4 0 0 10
_
_
Al ser simetrica, admite una descomposicion LDL
T
. Es facil comprobar que
el factor L es
_
_
1 0 0 0
0,75 1 0 0
0,30 0,8571 1 0
0,20 0,5714 0,2264 1
_
_
Es decir, a un cuando la matriz original tena bastantes ceros, el factor L
tiene todos los elementos posibles (los de debajo de la diagonal) no nulos.
En cambio, si se factoriza la matriz
B =
_
_
10 0 0 4
0 4 0 6
0 0 6 15
4 6 15 20
_
_
se obtiene el factor L
_
_
1 0 0 0
0 1 0 0
0 0 1 0
0,4 1,5 2,5 1
_
_
Notese que ahora el factor L tiene tantos ceros como la matriz B. Por otra
parte, las matrices A y B representan al mismo sistema lineal. En efecto, lo unico
que se ha hecho es cambiar el orden de ecuaciones (las) y variables (columnas),
de manera que la que antes era la primera es ahora la ultima, y viceversa.
Por tanto, es importante ordenar adecuadamente las ecuaciones y las varia-
bles al formar la matriz del sistema lineal a resolver. A grosso modo, el mejor
sitio para los ceros es al principio de las las, antes de los elementos no nulos.
Esto es porque al hacer la eliminacion de Gauss, estos elementos ya no requieren
ser eliminados.
Existen una serie de algoritmos que buscan el orden optimo en el que colo-
car ecuaciones y variables. Matematicamente, este es un problema para el que
todava no se ha encontrado solucion, aunque la experiencia demuestra que al-
gunos de los algoritmos propuestos son muy ecaces.
En el ejemplo anterior se ve como lo mas ecaz es colocar la la con mas
elementos no nulos al nal de la matriz. Esta es la idea subyacente al algoritmo
del grado mnimo, quiza el mas popular de los algoritmos de reordenacion. Por
ejemplo, la gura 2.2 muestra la reordenacion que este algoritmo da para la
matriz de la gura 2.1. Observense las estructuras en forma de echa que se
forman, que recuerdan lo obtenido en el ejemplo.
2.3. M
ETODOS ITERATIVOS 11
0 500 1000 1500 2000 2500 3000 3500 4000
0
500
1000
1500
2000
2500
3000
3500
4000
nz = 28831
Minimum degree
Figura 2.2: Reordenacion de la matriz.
2.3 Metodos iterativos
Los metodos iterativos resuelven el sistema lineal
Ax = b (2.24)
calculando una serie x
0
, x
1
, . . . , x
k
, . . . que aproxima cada vez mejor la solu-
cion
lm
k
x
k
= x = A
1
b (2.25)
Los dos metodos iterativos de uso mas frecuente en el calculo de campos son
el de Jacobi y el de Gauss-Seidel, que se estudian en la siguiente seccion. Despues,
se expone una mejora a estos metodos, importante para obtener la convergencia
de la serie a una velocidad razonable, conocida como sobrerelajacion sucesiva.
2.3.1 Los metodos de Jacobi y Gauss-Seidel
Escrbase de nuevo la ecuacion (2.24):
Ax b = 0 (2.26)
Sumando un termino Px a cada termino, siendo P una matriz que se de-
nira mas tarde, de la misma dimension que A:
(A+P)x b = Px (2.27)
12 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
La serie x
k
se construye dando una estimacion inicial x
0
(muy a menudo
un vector con todas las componentes nulas), y calculando, a partir de aqu, cada
x
k
a partir de la estimacion anterior x
k1
. La regla para pasar de una estimacion
a la siguiente es:
Px
k
= (A+P)x
k1
b (2.28)
En principio, no hay garanta alguna de que la sucesion as generada converja
a la solucion del sistema (2.24), salvo que la matriz P haya sido adecuadamente
escogida. Pero si la sucesion converge, en el lmite se cumple la ecuacion (2.27),
que es equivalente a (2.24).
Para determinar en que condiciones la sucesion generada por la ley (2.28)
converge, es conveniente analizar el comportamiento del error
e
k
= x
k
x
k1
(2.29)
Si lm
k
x
k
= x, entonces lm
k
e
k
= 0. Ahora bien, de (2.28)
e
k
= P
1
(A+P)x
k1
b P
1
(A+P)x
k2
+b
= P
1
(A+P)e
k1
= Ge
k1
(2.30)
con la matriz de error G = P
1
(A+P) Se sigue entonces:
e
k
= Ge
k1
= G
2
e
k2
= G
3
e
k3
= G
k
e
0
(2.31)
As pues, lm
k
e
k
= 0 implica que lm
k
G
k
= 0.
Para ver que signica esta condicion, supongase que G tiene n autovalores
distintos
i
con autovectores asociados v
i
:
Gv
i
=
i
v
i
(2.32)
Como los autovectores forman una base, es posible escribir e
0
como una
combinacion lineal de los mismos:
e
0
=
n
i=1
c
i
v
i
(2.33)
Entonces
Ge
1
= Ge
0
=
n
i=1
Gc
i
v
i
=
n
i=1
c
i
i
v
i
(2.34)
2.3. M
ETODOS ITERATIVOS 13
Iterando el procedimiento, se obtiene:
Ge
k
=
n
i=1
c
i
k
i
v
i
(2.35)
El sumatorio solamente tender a a cero si todos los
k
i
tienden a cero, es decir,
si |
i
| < 1 i. Deniendo el radio espectral de la matriz G como
(G) = max
i
|
i
| (2.36)
esta condicion se puede reescribir como que (G) < 1.
En resumen, se ha de escoger una matriz P tal que
1. (P
1
(A+P)) < 1
2. Los sistemas de la forma Px
k
= (A+P)x
k1
b, donde la incognita sea
x
k
, sean faciles de resolver.
Desde el punto de vista de la primera condicion, la mejor P sera A. En
efecto, en este caso G = A
1
(A A) = 0, y por tanto el error se anulara en
la primera iteracion (e
1
= Ge
0
= 0). El inconveniente es que, naturalmente, la
matriz A no da un sistema de facil solucion: si lo fuera se resolvera directamente
el sistema Ax = b.
De todas formas, el parrafo anterior sugiere que la matriz P debiera ser
parecida a A. Los metodos de Jacobi y Gauss-Seidel se basan en tomar sus
partes diagonal o triangular. Concretando, descompongase A en
A = N +D +S (2.37)
donde N es la parte inferior, D la diagonal y S la superior. Por ejemplo, si
A =
_
_
2 1 0 0
1 2 1 0
0 1 2 1
0 0 1 2
_
_
(2.38)
Entonces
N =
_
_
0 0 0 0
1 0 0 0
0 1 0 0
0 0 1 0
_
_
D =
_
_
2 0 0 0
0 2 0 0
0 0 2 0
0 0 0 2
_
_
14 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
S =
_
_
0 1 0 0
0 0 1 0
0 0 0 1
0 0 0 0
_
_
(2.39)
Entonces, se tiene que
Jacobi hace P = D. Por tanto, la iteracion de Jacobi es
Dx
k
= (N +S)x
k1
b (2.40)
Gauss-Seidel hace P = (D +N). Luego, la iteracion es
(D +N)x
k
= Sx
k1
b (2.41)
Ambas formulas son faciles de aplicar, pues la primera implica la resolucion
de un sistema cuya matriz es diagonal, y la segunda la de una matriz triangu-
lar inferior. Lo que es preciso es probar, ademas, que convergen, es decir que
(D
1
(N +S)) < 1 y que ((D +N)
1
S) < 1
2
.
En general estas desigualdades son falsas. Hay, sin embargo, un caso de gran
importancia en que se verican: cuando la matriz A es de diagonal dominante.
Esto signica que los valores absolutos elementos de la diagonal son mayores
que la suma de los valores de los elementos fuera de la diagonal. Es decir
[ A
i,i
[
j=i
[ A
i,j
[ (2.42)
De hecho, las matrices que aparecen en el calculo de la ecuacion de Poisson,
y en otras, verican esta desigualdad.
Se probara ahora esta armacion para los dos metodos. Para ello es conve-
niente introducir otras medidas del tama no de una matriz, analoga al radio
espectrales: las normas matriciales. Para ello, considerese primero las normas
(longitudes ) de un vector x. Una norma de un vector de n dimensiones es
una aplicacion de '
n
en ' que verica
1. |x| > 0 si x ,= 0, |x| = 0 si x = 0
2. |x| =[ [ |x|, siendo un escalar.
3. |x +y| |x| +|y|
Existen varias de estas normas, tales como
La norma eucldea
|x|
2
=
_
x(1)
2
+. . . +x(n)
2
(2.43)
2
Es evidente que (G) = (G), puesto que el radio espectral se dene por los modulos de
los autovalores, que se limitan a cambiar de signo cuando la matriz cambia signo.
2.3. M
ETODOS ITERATIVOS 15
La norma-0
|x|
0
=[ x(1) [ +. . . + [ x(n) [ (2.44)
La norma-
|x|
= max
k
[ x(k) [ (2.45)
A cada una de estas normas vectoriales se les puede asociar una norma
matricial. Por ejemplo, para la norma-
|A|
= max
x=1
|Ax|
(2.46)
y de forma analoga para las demas normas. Notese que, a partir de esta deni-
cion, si |x|
= 1
|Ax|
|A|
|x|
(2.47)
Si |x|
,= 1, esta formula es tambien valida. En efecto, se ha de vericar
para el vector y =
1
x
x
|Ay|
|A|
|y|
(2.48)
ya que |y|
= 1. Multiplicando ahora por el escalar |x|
se obtiene la expre-
sion buscada.
Es ahora posible demostrar que una condicion suciente (aunque no nece-
saria) para que un algoritmo iterativo converja es que la norma de la matriz
G = P
1
(A + P) sea menor que 1. En efecto, escribiendo la ecuacion de error,
y teniendo en cuenta la desigualdad anterior
|e
k
|
= |Ge
k1
|
|G|
|e
k1
|
|G|
k
|e
0
|
(2.49)
Si |G|
< 1, entonces lm
k
|e
k
| = 0. Si |G|
= 1, se tiene al menos la
garanta de que el error no puede crecer, y de hecho normalmente disminuira.
Si |G|
> 1, la serie podra ser, pese a todo, convergente.
Aunque el razonamiento anterior es valido para cualquier norma, ocurre que
la norma-es particularmente facil de calcular. En efecto, si G tiene dimension
n, se tiene que
|G|
= max
1in
n
j=1
[ G
ij
[ (2.50)
Para probar este resultado, partimos de la denicion de norma (2.46). Te-
niendo en cuenta que la componente i del vector Ge es
j
G
ij
e
j
, se tiene que
16 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
|G|
= max
i
[
j
G
ij
e
j
[ (2.51)
supuesto, claro esta, que |e|
= 1. Pero esta igualdad signica que todas
las componentes de e estan comprendidas entre 1 y -1, y que una al menos
alcanza este extremo. Teniendo esto en cuenta, es facil ver que la manera de
maximizar la componente i, que es
j
G
ij
e
j
, es considerar un vector e
j
cuyas
componentes valgan 1 si G
ij
> 0, y -1 si G
ij
< 0. En este caso, se tiene que
j
G
ij
e
j
=
j
[ G
ij
[, a partir de lo cual se deduce (2.50).
Es ahora posible probar la convergencia de los metodos de Jacobi y Gauss-
Seidel para matrices diagonalmente dominantes.
Jacobi. La matriz de la iteracion es
G = D
1
(N +S) (2.52)
es decir
G
ij
=
A
ij
A
ii
, i ,= j, G
ii
= 0 (2.53)
Entonces
|G|
= max
i
j
[ A
ij
[
[ A
ii
[
1 (2.54)
donde la ultima desigualdad se sigue del hecho de que A es diagonalmente
dominante.
Gauss-Seidel. La matriz de iteracion es
G = (D +N)
1
S (2.55)
Sea la ecuacion y = Gx. Esta ecuacion es equivalente a
(D +N)y = Sx (2.56)
Defnanse las matrices
N = D
1
N y
S = D
1
S. Los elementos de estas
matrices son:
N
ij
=
_
Aij
Aii
j < i
0 j i
S
ij
=
_
Aij
Aii
j > i
0 j i
(2.57)
2.3. M
ETODOS ITERATIVOS 17
Se tiene entonces que
y =
Sx
Ny (2.58)
Sea entonces k la componente para la cual |y|
= y
k
. De la ecuacion
k-esima del sistema de ecuaciones anterior se sigue que:
y
k
= |y|
s
k
|x|
+n
k
|y|
(2.59)
donde
s
i
=
n
j=i+1
[ A
ij
[
[ A
ii
[
n
i
=
i1
j=1
[ A
ij
[
[ A
ii
[
(2.60)
As se tiene que
|y|
s
k
1 n
k
|x|
(2.61)
Por otra parte, recuerdese la denicion de norma
|G|
= max
x=1
|Gx| (2.62)
Como y = Gx, es claro que
|G|
s
k
1 n
k
(2.63)
Y como, al ser A diagonalmente dominante, s
k
+n
k
1, luego s
k
1n
k
,
y por tanto
|G|
1 (2.64)
2.3.2 El metodo de la sobrerrelajacion sucesiva
Se ha visto en la seccion anterior que los metodos de Jacobi y Gauss-Seidel son
convergentes cuando se cumple que la matriz A es diagonalmente dominante.
Sin embargo, las matrices que aparecen tpicamente en los problemas de campos
presentan estan dominadas por los pelos (se cumple el = pero no el < en la
denicion de dominancia), por lo que cabe temer que la convergencia sea lenta.
Este temor se conrma en la practica.
Existe una forma sencilla de modicar estos metodos que a menudo mejora
substancialmente su velocidad de convergencia. Por ejemplo, consideremos la
iteracion de Jacobi
18 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
x
k
= D
1
(N +S)x
k1
+D
1
b = x
k1
+r
k1
(2.65)
siendo por tanto
r
k1
= x
k1
D
1
(N +S)x
k1
+D
1
b = D
1
Ax
k1
+D
1
b (2.66)
El residuo r
k1
es la cantidad en que corregimos x
k1
para intentar obtener
la solucion. Los residuos son cada vez mas peque nos, y tienden a cero conforme
nos acercamos a la solucion.
El metodo de la sobrerrelajacion sucesiva de Jacobi viene dado por la ecua-
cion
x
k
= x
k1
+r
k1
(2.67)
siendo un n umero que, como se vera mas adelante, esta comprendido entre 0
y 2. Por supuesto, si = 1 se recupera el metodo de Jacobi.
El metodo de Jacobi es tambien conocido como metodo de relajacion de
Jacobi. Como normalmente > 1, al metodo propuesto se le llama metodo de
sobrerrelajacion de Jacobi.
Existe tambien un metodo de sobrerrelajacion de Gauss- Seidel, dado por
la misma formula, pero donde r
k1
es el residuo que resulta de la iteracion de
Gauss-Seidel
r
k1
= (D +N)
1
Ax
k1
+ (D +N)
1
b (2.68)
Es esta segunda version la que es utilizada con mas frecuencia. La iteracion
sobrerrelajada de Gauss-Seidel se puede escribir, substituyendo la expresion del
residuo en (2.67), como:
x
k
= (I (D +N)
1
A)x
k1
+(D +N)
1
b (2.69)
En estos algoritmos el error e
k
= r
k
. Por otra parte, la matriz de error
para este algoritmo es
G
= (I (D +N)
1
A) (2.70)
Utilizando las matrices
N = D
1
N y
S = D
1
S, se tiene que
G
= I (D +N)
1
A
= I (I +
N)
1
D
1
A
= I (I +
N)
1
D
1
(I +N +S)
= I (I +
N)
1
(I +
N +
S)
= (I +
N)
1
((I +
N) (I +
N +
S)
= (I +
N)
1
((1 )(I +
N)
S) (2.71)
M
ETODOS SEMIDIRECTOS 19
Por otra parte, recuerdese que el determinante de una matriz es, por una
parte, el producto de sus autovalores; y por otra el producto de los elementos
de la diagonal. N y S son matrices inferior y superior, con elementos nulos en
la diagonal. Por tanto
det(G
) =
n
i=1
G
i
= det(I +
N)
1
det((1 )(I +
N)
S)
= (1 )
n
(2.72)
Por consiguiente
(G) = max
i
[
G
i
[[ 1 [ (2.73)
Y como es condicion necesaria para que el algoritmo converja que el radio
espectral sea menor que 1, se sigue que 0 2.
Se puede demostrar tambien que para matrices simetricas y positivas deni-
das, el metodo converge para todo entre 0 y 2. Por otra parte, existen algunas
matrices para los que los valores optimos de son conocidos. En el caso de las
matrices que resultan al aplicar el metodo de diferencias nitas a la ecuacion de
Laplace, un valor de ligeramente por encima de 1 (1.1 por ejemplo) suele dar
buenos resultados.
2.4 Metodos semidirectos: el gradiente conjuga-
do
Los metodos semidirectos permiten, en principio, como los directos, resolver el
sistema lineal Ax = b en un n umero nito de pasos. Sin embargo, tanto en
su implantacion como en su comportamiento practico son mas similares a los
iterativos.
De entre todos ellos, el que tiene mas predicamento es el metodo del gradiente
conjugado. Tiene sin embargo una limitacion: solamente se aplica a matrices A
que sean simetricas denidas positivas. Sin embargo, este es muy a menudo el
caso en problemas de campos.
Recuerdese que A es positiva denida cuando se cumple que
x
T
Ax > 0 x (2.74)
De la ecuacion anterior se sigue que la funcion
F(x) =
1
2
x
T
Ax x
T
b (2.75)
tiene un mnimo para
x
= A
1
b (2.76)
20 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
En efecto, escrbase x = x
+ x. Entonces
F(x) =
1
2
(x
+ x)
T
A(x
+ x) (x
+ x)
T
b
=
1
2
x
T
Ax
+ x
T
Ax
+
1
2
x
T
Ax x
T
b x
T
b
=
1
2
x
T
Ax
x
T
b + +x
T
(Ax
b) +
1
2
x
T
Ax
=
1
2
x
T
Ax
x
T
b +
1
2
x
T
Ax
= F(x
) +
1
2
x
T
Ax F(x
) (2.77)
Se ha empleado el hecho de que A es simetrica para pasar de la primera a
la segunda ecuacion, y el hecho de que es positiva denida para poder escribir
la desigualdad en la ultima.
Se ha reducido, pues, el problema de resolver un sistema lineal al de encontrar
el mnimo de una funcion. Una algoritmo popular para encontrar el mnimo es
el algoritmo del gradiente. Reuerdese que el gradiente de una funcion indica la
direccion de maxima pendiente. Parece pues razonable escoger esta direccion
para minimizar F. En el caso presente, el gradiente de F en el punto x es
F = Ax b = g (2.78)
y un posible algoritmo sera
x
k+1
= x
k
k
g
k
(2.79)
La cantidad
k
se calcula de forma que el decremento sea tan grande como
sea posible. Pero
F(x
k+1
) = F(x
k
k
g
k
)
=
1
2
(x
k
k
g
k
)
T
A(x
k
k
g
k
) (x
k
k
g
k
)
T
b
=
1
2
2
k
_
g
T
k
Ag
k
_
k
_
g
T
k
Ax
k
g
T
k
b
_
+
1
2
x
T
k
Ax
k
x
T
b (2.80)
Como x
k
y g
k
ya estan jos, el
k
optimo se encuentra buscando el mnimo
de esta expreson respecto a
k
e igualando a 0. Luego
k
=
_
g
T
k
Ax
k
g
T
k
b
_
_
g
T
k
Ag
k
_ =
g
T
k
(Ax
k
b)
_
g
T
k
Ag
k
_ =
g
T
k
g
k
_
g
T
k
Ag
k
_ (2.81)
As pues, el algoritmo tomara la forma
M
ETODOS SEMIDIRECTOS 21
g
k
= Ax
k
b
k
=
g
T
k
g
T
k
_
g
T
k
Ag
k
_
x
k+1
= x
k
k
g
k
(2.82)
siendo necesaria, por supuesto, alguna estimacion inicial x
0
(por ejemplo, x
0
=
0).
El algoritmo anterior (el algoritmo del gradiente) converge, aunque, en ge-
neral, de una manera mas bien lenta. Una forma de acelerar la convergencia es
modicarlo de la siguiente manera:
g
k
= Ax
k
b
k
=
d
T
k1
Ag
k
d
T
k1
Ad
k1
d
k
= g
k
k
d
k1
k
=
d
T
k
g
k
_
d
T
k
Ad
k
_
x
k+1
= x
k
k
d
k
(2.83)
La diferencia basica es que, en lugar de actualizar x
k
seg un el gradiente g
k
,
se baja a lo largo de una direccion modicada d
k
, eg un se observa en la ultima
ecuacion. Esta direccion se calcula a partir del gradiente y de la direccion que se
utilizo en la iteracion anterior: d
k
= g
k
k
d
k1
. El n umero
k
se ha calulado
de forma que d
T
k1
Ad
k
= 0 (compr uebese!). El valor
k
se calcula seg un el
mismo procediento que ya se empleo en el algoritmo del gradiente.
Es de importancia basica para comprender la ecacia del algoritmo el que
se verica que
g
T
i
g
j
= 0 i ,= j (2.84)
Para demostrar este hecho es preciso obtener unos resultados previos:
g
k
= g
k1
k1
Ad
k1
Esta formula se obtiene reescribiendo la denicion de g
k
g
k
= Ax
k
b
= A[x
k1
k1
d
k1
] b
= [Ax
k1
b]
k1
Ad
k1
= g
k1
k1
Ad
k1
(2.85)
22 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
d
T
k1
g
k
= 0
Esta condicion viene exigida por el hecho de que el punto x
k
se calcula
como el punto de la recta (el valor de ) x = x
k1
d
k1
que hace
mnimo a F. Pero en este punto mnimo, el gradiente de F (es decir, g
k
)
debe ser perpendicular a la recta, cuyo vector director es d
k1
.
Con estos resultados, el algoritmo puede resumirse en cuatro ecuaciones:
g
k
= g
k1
k1
Ad
k1
(2.86)
d
k
= g
k
k
d
k1
(2.87)
d
T
k
Ad
k1
= 0 (2.88)
g
T
k
d
k1
= 0 (2.89)
De hecho, a partir de estas formulas se pueden despejar los valores de
k
y
k
.
Se empezara por demostrar que g
T
k
g
k1
= 0. Naturalmente esto es lo mismo
que g
T
k
g
k+1
= 0. Para ello, primero hay que ver que
g
T
k
d
k1
= 0
= (g
k+1
+
k
Ad
k
)
T
d
k1
= g
T
k+1
d
k1
= g
T
k
d
k2
(2.90)
donde se ha usado el hecho de que A
T
= A. Pero, por otra parte
g
T
k
d
k1
= 0
= g
T
k
(g
k1
k2
d
k2
)
= g
T
k
g
k1
(2.91)
Con esto, ya se ha probado que el gradiente obtenido en una iteracion es
perpendicular a los que se obtienen en la iteracion anterior y posterior. Pero
ademas
Ag
k
= Ad
k
+
k
Ad
k1
=
1
k
(g
k
g
k+1
) +
k
k1
(g
k1
g
k
)
=
1
k
g
k+1
+
_
1
k1
_
g
k
+
k
k1
g
k1
= a
k+1
g
k+1
+b
k
g
k
+c
k1
g
k1
(2.92)
M
ETODOS SEMIDIRECTOS 23
Es esta formula de 3 terminos, junto con la simetra de A, lo que permite
asegurar la ortogonalidad de los vectores g
k
. Se empezara por comprobar que
g
T
k2
g
k
= 0. Para ello, se necesita probar una formula recursiva para el producto
g
T
k
g
k
. Premultiplicando d
k
= g
k
k
d
k1
por g
T
k1
:
g
T
k1
d
k
=
k
g
T
k1
d
k1
=
k
g
T
k1
(g
k1
k1
d
k2
)
=
k
g
T
k1
g
k1
(2.93)
Por otra parte
g
T
k1
d
k
= (g
k
+
k1
Ad
k1
)
T
d
k
= g
T
k
d
k
= g
T
k
(g
k
k
d
k1
)
= g
T
k
g
k
(2.94)
Por lo tanto, se concluye que
g
T
k
g
k
=
k
g
T
k1
g
k1
(2.95)
Premultiplicando ahora la formula de tres terminos (2.92) por g
T
k1
, se ob-
tiene
g
T
k1
Ag
k
=
1
k
g
T
k1
g
k+1
+
k
k1
g
T
k1
g
k1
(2.96)
Es claro que tambien es valida la formula
Ag
k1
=
1
k1
g
k
+
_
1
k1
k1
k2
_
g
k1
+
k1
k1
g
k2
(2.97)
Premultiplicando por g
T
k
:
g
T
k
Ag
k1
=
1
k1
g
T
k
g
k
+
k1
k1
g
T
k
g
k2
(2.98)
Como la matriz A es simetrica, g
T
k1
Ag
k
= g
T
k
Ag
k1
, y por tanto
k
g
T
k1
g
k+1
+
k
k1
g
T
k1
g
k1
=
1
k1
g
T
k
g
k
+
k1
k1
g
T
k
g
k2
(2.99)
Y teniendo en cuenta (2.95):
k
g
T
k1
g
k+1
= +
k1
k1
g
T
k
g
k2
(2.100)
24 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
Ahora bien, considerese la primera iteracion del algoritmo. Se parte de x
1
=
0. Entonces g
1
= b. Ahora, al ir a escoger la direccion d
1
, no existe d
0
de
alguna iteracion anterior. Por tanto, es natural hacer d
1
= g
1
= b. Con esta
seleccion se tiene que
g
T
3
g
1
= g
T
3
d
1
= 0 (2.101)
como se demuestra en (2.90). Pero entonces, se puede usar la expresion (2.100)
para demostrar, por induccion, que
g
T
k+2
g
k
= 0 k (2.102)
Se probara ahora que g
T
i
g
j
= 0 i, j. Para ello supongase que g
T
i
g
j
= 0 si
i, j k (es una prueba por induccion). De hecho, ya sabemos que, por lo menos,
se cumplira para las primeras iteraciones: i, j = 1, 2, 3 o k = 3. Entonces, si
i k 2
g
T
i
(Ag
k
) = (Ag
i
)
T
g
k
= (a
i+1
g
i+1
+b
i
g
i
+c
i1
g
i1
)
T
g
k
= 0 (2.103)
puesto que los productos escalares g
T
i1
g
k
= g
T
i
g
k
= g
T
i+1
g
k
= 0. Pero, de la
formula de tres terminos
a
k+1
g
k+1
= Ag
k
b
k
g
k
c
k1
g
k1
(2.104)
Premultiplicando por g
T
i
i < k1, y teniendo en cuenta (2.103) se sigue que
g
T
i
g
k+1
= 0 i < k 1 (2.105)
Como ya se haban probado los casos i = k 1 e i = k, queda demostrado
que los vectores g
k
son ortogonales. Ahora bien, si la dimension de la matriz A
es n, solamente puede haber n vectores ortogonales no nulos. Esto signica que,
a mas tardar para i = n + 1, se ha tenido que cumplir que g
i
= 0. Pero como
g = Ax b, esto es lo mismo que decir que el algoritmo converge en, a lo mas,
n + 1 iteraciones.
De hecho a menudo la situacion es todava mas favorable. En efecto, observe-
se que
x
k+1
= x
k
k
d
k
= x
1
i=1
i
d
i
=
k
i=1
i
d
i
(2.106)
ya que x
1
= 0. Ahora bien, el algoritmo tiende a calcular los mayores d
i
en
las primeras iteraciones, dejando los mas peque nos para el nal. Por lo tanto, a
menudo se llegan a precisiones razonables con muchas menos iteraciones que n.
La restriccion de que x
1
= 0 no es tan seria como parece. Por ejemplo,
supongase que se tiene una solucion aproximada x desde la que se desea iniciar
elalgoritmo. Entonces, se puede escribir la solucion exacta x como:
x = x + x (2.107)
M
ETODOS SEMIDIRECTOS 25
La ecuacion Ax = b es equivalente entonces a
A( x + x) = b Ax = b A x =
b (2.108)
siendo ya razonable resolver este sistema por x
1
= 0.
26 CAP
ITULO 2. RESOLUCI
ON DE SISTEMAS LINEALES
Captulo 3
Ecuaciones de Laplace y
Poisson: diferencias nitas
_ B asico
3.1 Introduccion
Las ecuaciones de Laplace y Poisson aparecen con frecuencia en el estudio de
situaciones estaticas, de situaciones de equilibrio. Por ejemplo, la ecuacion que
rige la distribucion del campo electrostatico en el vaco es
0
V = (3.1)
donde V es el potencial electrico y la densidad de carga. La ecuacion anterior,
escrita de una forma menos compacta, sera:
0
(
2
x
2
+
2
y
2
+
2
z
2
)V (x, y, z) = (x, y, z) (3.2)
Esta ecuacion es la ecuacion de Poisson en tres dimensiones. Frecuentemente
se requiere su resolucion en dos, o incluso una dimension. Esto signica que en
la ecuacion anterior no se considera la coordenada z, o la y y la z. Por ejemplo,
la ecuacion de Poisson en 2 dimensiones es:
0
(
2
x
2
+
2
y
2
)V (x, y) = (x, y) (3.3)
Sin embargo, se utilizara el operador laplaciano para indicar tambien el
operador diferencial en dos dimensiones
2
x
2
+
2
y
2
. De hecho, la dimension del
operador denotado por sera determinada por el contexto.
La ecuacion de Poisson no sirve solamente para calcular el campo elec-
trostatico. De hecho, es preciso resolver la misma ecuacion para determinar
el campo gravitacional en la teora de Newton, la distribucion estacionaria de
temperaturas en los cuerpos, la velocidad con que uyen los lquidos ideales, o
las tensiones que aparecen en una barra sometida a torsion.
27
28 DIFERENCIAS FINITAS
b
b
V
n
V = f
V
Figura 3.1: Dominio de la ecuacion de Poisson
Un caso particular de gran interes es cuando la funcion es nula. En tal caso
se tiene la ecuacion de Laplace:
V = 0 (3.4)
En este captulo se expondra como resolver estas ecuaciones mediante el
metodo de las diferencias nitas. El proximo abordara su resolucion mediante
el metodo de los elementos nitos.
3.2 Preliminares matematicos
Antes de proceder a explicar cualquier procedimiento numerico, es preciso que
las ecuaciones a resolver hayan sido planteadas de una forma matematicamente
correcta. En el caso de la ecuacion de Poisson, el problema a resolver es determi-
nar el potencial V en el interior de un determinado dominio T. En la frontera de
dicho dominio se da, o el propio potencial V o su derivada respecto a la normal
de la supercie
V
n
(ver gure 3.1)
En el caso de problemas electrostaticos, el campo electrico es el gradiente del
potencial (E = V ), por lo que la derivada normal a la supercie no es mas que
la componente normal del campo (E
n
=
V
n
). Es esta, de hecho, una condicion
natural en problemas electrostaticos. Por ejemplo, si se esta intentando calcular
la resistencia de una determinada pieza, sabemos que no puede salir corriente
por la supercie no conectada a electrodos (ver gura 3.2). As, j
n
= 0. Pero
como, por la ley de Ohm, j = E, se tiene tambien que E
n
= 0. O dicho de otra
forma
V
n
= 0.
CONSTRUCCI
ON DE LA MALLA 29
I
I
j=0
V=0
V=10
Figura 3.2: Una resistencia
En otro tipo de problemas (termicos, hidra ulicos, ...) esta condicion suele
tener tambien un sentido fsico bastante claro. Ademas, y en cualquier caso,
aparece tambien cuando se consideran ejes de simetra en la conguracion de
estudio, como se vera mas adelante.
De cualquier manera, se tiene el siguiente problema matematico:
V = f en T (3.5)
sujeto a V = g en T
1
(3.6)
V
n
= h en T
2
(3.7)
donde f(x, y, z) =
0
(denida en todo T), g(x, y, z) (denida solo en T
1
)
y h(x, y, z) (denida solo en T
2
) son funciones conocidas, y V es la funcion
incognita, a determinar en T.
Las condiciones V = g en T
1
y
V
n
= h en T
2
son colectivamente cono-
cidas como condiciones de contorno. El primer tipo (V = g) es conocido como
condicion de Dirichlet, y el segundo como condicion de von Neumann. Note-
se que entre la dos han de cubrir todo el contorno, pero que su dominio de
denicion no se puede superponer (T
1
T
2
= ).
3.3 Construccion de la malla y planteamiento de
las ecuaciones
En el metodo de las diferencias nitas se intenta calcular el valor de la funcion
V en una serie nita de puntos, situados en las intersecciones de una red o malla
(ver gura 3.3). Por regla general, esta es una red cuadrada (en 2 dimensiones)
o c ubica (en 3 dimensiones), aunque otros tipos de red (rectangular, hexagonal,
...) son tambien posibles y se utilizan ocasionalmente.
30 DIFERENCIAS FINITAS
Figura 3.3: Dominio mallado
En el resto de esta seccion se estudiaran problemas bidimensionales en re-
des cuadradas. La generalizacion a otras dimensiones y redes es sencilla, y se
estudiaran algunos casos en otras secciones.
La ecuacion de Poisson es una ecuacion diferencial. Sin embargo, de lo unico
que se dispone es del valor de V en una serie discreta de puntos, por lo que es
preciso aproximar las derivadas por diferencias. De ah el nombre del metodo.
Por ejemplo, considerese el punto P de la gura 3.4. Como la malla tiene
anchura h, el punto P se encuentra situado en las coordenadas (ih, jh). Para
simplicar la notacion, se escribira:
V (ih, jh) = V
i,j
(3.8)
El valor de V en el punto (i + 1, j) puede relacionarse con el que tiene en el
punto (i, j) mediante la serie de Taylor:
V
i+1,j
= V
i,j
+
V
x
[
i,j
h +
1
2
2
V
x
2
[
i,j
h
2
+
1
6
3
V
x
3
[
i,j
h
3
+
1
24
4
V
x
4
[
1,j
h
4
(3.9)
Donde x(i) <
1
< x(i + 1). Analogamente, se pueden relacionar el valor de
V en el punto (i 1, j) con el de (i, j):
V
i1,j
= V
i,j
V
x
[
i,j
h +
1
2
2
V
x
2
[
i,j
h
2
1
6
3
V
x
3
[
i,j
h
3
+
1
24
4
V
x
4
[
2,j
h
4
(3.10)
Sumando las ecuaciones (3.9) y (3.10) se obtiene:
V
i+1,j
+V
i1,j
= 2V
i,j
+
2
V
x
2
[
i,j
h
2
+
1
24
_
4
V
x
4
[
1,j
+
4
V
x
4
[
2,j
_
h
4
(3.11)
CONSTRUCCI
ON DE LA MALLA 31
O h
h
P
ih
jh
i, j
i, j + 1
i, j 1
i + 1, j i 1, j
Figura 3.4: La malla, de cerca
= 2V
i,j
+
2
V
x
2
[
i,j
h
2
+O(h
4
) (3.12)
donde O(h
4
) denota terminos de grado cuarto o mayor en h. Suponiendo que
estos terminos son despreciables (lo que sucedera si h es lo bastante peque no)
se tiene:
2
V
x
2
[
i,j
=
V
i+1,j
+V
i1,j
2V
i,j
h
2
(3.13)
De forma similar se obtiene que:
2
V
y
2
[
i,j
=
V
i,j+1
+V
i,j1
2V
i,j
h
2
(3.14)
Luego
(
2
V
x
2
+
2
V
y
2
)[
i,j
=
V
i+1,j
+V
i1,j
+V
i,j+1
+V
i,j1
4V
i,j
h
2
(3.15)
Ahora bien, el termino izquierdo de esta ecuacion es precisamente el opera-
dor diferencial (el laplaciano), luego el termino derecho es la aproximacion
buscada que solo involucra el valor de V en los nodos de la red. De esta manera,
la ecuacion de Poisson en el punto (i, j) se puede aproximar mediante la formula
en diferencias nitas:
V
i+1,j
+V
i1,j
+V
i,j+1
+V
i,j1
4V
i,j
h
2
= f
i,j
(3.16)
32 DIFERENCIAS FINITAS
Figura 3.5: Problema electrostatico
As se tiene ya una ecuacion para todos los puntos internos a la malla.
Los nodos que esten en el contorno, o proximos a el, requieren un tratamiento
especial. La situacion se simplica notablemente si la malla es escogida de tal
forma que se adapte al contorno. Esto es lo que se supondra en esta seccion,
dejando el caso mas general para mas adelante.
Por ejemplo, supongase que se desea calcular el potencial electrostatico en el
espacio entre los dos conductores que se muestran en la gura 3.5. El conductor
interno esta a un potencial V = 100 y el externo a V = 0. En el espacio
intermedio se verica la ecuacion de Laplace:
V = 0 (3.17)
Es tambien claro que, debido a la simetra de la conguracion, basta con
resolver un octavo. En concreto, se tienen las siguientes ecuaciones:
2V
b
+ 0 + 100 4V
a
= 0 punto a (3.18)
V
a
+V
c
+ 0 + 100 4V
b
= 0 punto b (3.19)
V
b
+V
d
+V
e
+ 0 4V
c
= 0 punto c (3.20)
2V
c
+ 2 0 4V
d
= 0 punto d (3.21)
2V
c
+ 2 100 4V
e
= 0 punto e (3.22)
Notese que los nodos de la red donde se dan condiciones de Dirichlet (los
conductores) no son incognitas, puesto que, por denicion, se conocen all los
valores de los potenciales. Hay ademas dos nodos internos (b y c) y otros tres
en el contorno (a, d y e).
En este caso, debido a la simetra de la conguracion, se puede suponer
que estos tres nodos son internos, puesto que sabemos como se relacionan los
potenciales de los nodos que estan a ambos lados de la lnea de simetra (as, por
3.4. EL PRINCIPIO DEL M
AXIMO 33
ejemplo, en el caso del nodo a los valores de las tensiones a derecha e izquierda
son iguales, que es por lo que ambos nodos se han denotado como b).
Pero hay otra forma de considerar este problema. Notemos que sobre la lnea
de simetra se ha de vericar la anulacion de la derivada normal:
V
n
= 0 en linea simetria (3.23)
En efecto, siendo las cargas simetricas a ambos lados de la lnea de simetra,
no puede haber campo electrico normal a la lnea. As, en particular, se ha de
vericar
V
x
[
a
= 0 (3.24)
puesto que en el punto a no puede haber componente del campo E
x
, ya que
ambas mitades tiran lo mismo.
Por lo tanto, en general una lnea de simetra implica la anulacion de la
derivada normal. Pero es esta una condicion de contorno de von Neumann. Por
lo tanto, las condiciones de contorno nulas de von Neumann
V
n
= 0 pueden
tratarse a nadiendo nodos adicionales por fuera del dominio simetricos a los
nodos internos. El caso de condiciones no nulas se vera en una seccion posterior.
Las ecuaciones (3.18-3.22) se pueden escribir tambien en forma matricial:
_
_
4 2 0 0 0
1 4 1 0 0
0 1 4 1 1
0 0 2 4 0
0 0 2 0 4
_
_
_
_
V
a
V
b
V
c
V
d
V
e
_
_
=
_
_
100
100
0
0
200
_
_
(3.25)
O, en notacion mas compacta
AV = b (3.26)
En esta ecuacion tanto la matriz A como el vector b son conocidos, por lo
que puede resolverse para determinar V. Notese que los valores concretos de
las condiciones de contorno estan ntegramente incluidos en el termino indepen-
diente b. As, si se cambian el valor de los potenciales (por ejemplo, haciendo
que el potencial del conductor interior valga 17, y el del exterior -313), lo unico
que sera preciso modicar sera el vector b, pero no la matriz A.
Existen diversos metodos para resolver la ecuacion lineal (3.26). Notese que
las ecuaciones que resultan del metodo de diferencias nitas (!y de otros muchos!)
tienen matrices A con un gran n umero de ceros, o sea, son matrices ralas o
cuasivacas. Su resolucion se ha abordado en el captulo anterior.
3.4 El principio del maximo
B asico
_ Avanzado
Considerese de nuevo la ecuacion (3.16), valida para puntos en el interior de la
malla:
34 DIFERENCIAS FINITAS
V
i+1,j
+V
i1,j
+V
i,j+1
+V
i,j1
4V
i,j
h
2
= f
i,j
(3.27)
En el caso de la ecuacion de Laplace, el termino de la derecha f
i,j
es nulo.
As pues, se puede escribir:
V
i,j
=
1
4
(V
i+1,j
+V
i1,j
+V
i,j+1
+V
i,j1
) (3.28)
Es decir, el valor del potencial en el centro es la media de los cuatro que
tiene alrededor. Esto signica que el valor central V
i,j
no puede ser ni el maxi-
mo ni el mnimo, ya que la media se encuentra entre estos valores. Como esta
conclusion es valida para todos los puntos en el interior del dominio, se sigue
que el valor maximo y el mnimo de V se tienen que dar en puntos del contorno.
Este resultado es conocido como el principio del maximo.
El parrafo anterior se reere a los valores de V que resultan de resolver las
ecuaciones en diferencias. Ahora bien, la misma conclusion se puede establecer
para los valores de V solucion de la ecuacion diferencial. En efecto, conforme va
disminuyendo la anchura de la malla h la solucion en diferencias va tendiendo a
la solucion de la ecuacion diferencial (se da una prueba en la seccion siguiente).
Por tanto, como la solucion de la ecuacion diferencial es el lmite de la ecuacion
en diferencias, y para todas estas se verica el principio del maximo, se sigue
que tambien se cumple para la ecuacion diferencial.
Existe una extension del principio del maximo que sera de utilidad mas
adelante. Sea la ecuacion de Poisson
V = f (3.29)
con f > 0. Entonces se tiene, de la formula de diferencias nitas que
V
i,j
=
1
4
_
V
i+1,j
+V
i1,j
+V
i,j+1
+V
i,j1
1
h
2
f
i,j
_
(3.30)
Es decir, V en el nodo central ha de ser menor que en al menos uno de
los que le rodean. Por tanto, el maximo de V ha de alcanzarse en el contorno
(aunque nada puede decirse del mnimo en este caso).
3.5 Errores y convergencia
En la seccion anterior se ha derivado una ecuacion algebraica con la que se
espera aproximar la ecuacion diferencial que se desea resolver. Sin embargo,
sera interesante contar con alguna idea del error cometido, y de como este error
disminuye cuando la anchura de la malla h disminuye tambien.
Se va a realizar este analisis para un problema particular: el problema puro
de Dirichlet en dos dimensiones:
3.5. ERRORES Y CONVERGENCIA 35
_
2
x
2
+
2
y
2
_
V = f en T (3.31)
sujeto a V = g en T (3.32)
siendo T el rectangulo denido por 0 < x < a, 0 < y < b.
Las ideas basicas de este analisis son, sin embargo, generalizables a otros
casos; y las conclusiones que se obtengan tambien.
Para resolver las ecuaciones (3.31,3.32) por diferencias nitas se creara una
malla, que deniremos por la interseccion de las lneas verticales x
i
= ih, i =
1 . . . m y las lneas horizontales y
j
= jh, j = 1 . . . n. Se supondra ademas que
mh = a y nh = b, de forma que la malla se adapta perfectamente al dominio
T. Denotemos ademas por T
h
el conjunto de nodos interiores al dominio y por
T
h
el conjunto de nodos en la frontera del dominio.
La aproximacion a la ecuacion de Poisson dentro del dominio es
1
h
2
(v
i+1,j
+v
i1,j
+v
i,j+1
+v
i,j1
4v
i,j
) = f
i,j
(3.33)
En esta seccion se denotara por V la solucion de la ecuacion diferencial y
por v la solucion de la ecuacion en diferencias. El problema en diferencias se
puede escribir por tanto como
Lv
i,j
= f
i,j
en T
h
(3.34)
sujeto a v
i,j
= g
i,j
en T
h
(3.35)
siendo L es operador en diferencias
Lv
i,j
=
1
h
2
(v
i+1,j
+v
i1,j
+v
i,j+1
+v
i,j1
4v
i,j
) (3.36)
Considerese ahora el error e
i,j
en los nodos de la malla entre la solucion de
la ecuacion diferencial V
i,j
y la de la ecuacion en diferencias v
i,j
:
Le
i,j
= LV
i,j
Lv
i,j
(3.37)
= LV
i,j
f
i,j
(3.38)
= T
i,j
(3.39)
El error de truncacion T
i,j
puede estimarse a partir del desarrollo de Taylor
de V . En efecto, de la formula de Taylor (3.11) se sigue que:
T
i,j
=
1
24
h
2
_
4
V
x
4
[
1,j
+
4
V
x
4
[
2,j
+
4
V
y
4
[
i,1
+
4
V
y
4
[
i,2
_
(3.40)
Denotese por
T la union de T y T. Entonces, defnase una constante M
mediante la ecuacion
36 DIFERENCIAS FINITAS
M = max
_
max
D
[
4
V
x
4
[, max
D
[
4
V
y
4
[
_
(3.41)
As pues, puede escribirse
max
D
h
[T
i,j
[
1
6
h
2
M (3.42)
Y por tanto
max
D
h
[Le
i,j
[ = max
D
h
[T
i,j
[
1
6
h
2
M (3.43)
Ahora lo que se necesita es alg un resultado que relacione e
i,j
con Le
i,j
. En el
anexo de esta seccion se prueba que en el rectangulo T denido por 0 < x < a
y 0 < y < b se tiene para cualquier funcion u denida en la malla
max
D
h
[u[ max
D
h
[u[ +
1
4
(a
2
+b
2
) max
D
h
[Lu[ (3.44)
Aplicando este teorema el error e
i,j
se tiene que
max
D
h
[e
i,j
[ max
D
h
[e
i,j
[ +
1
4
(a
2
+b
2
) max
D
h
[Le
i,j
[ (3.45)
Pero, en la frontera T
h
, e
i,j
= 0 ya que se estan cumpliendo las condiciones
de contorno. Luego
max
D
h
[e
i,j
[
1
24
(a
2
+b
2
)h
2
M (3.46)
Este resultado muestra que, si la solucion tiene derivada cuarta, el error se
reduce conforme la anchura de la malla se reduce. Prueba ademas que el error
es de orden h
2
, informacion de utilidad para varios metodos de mejora de la
solucion.
En el caso mas general, se obtienen formulas semejantes, con errores propor-
cionales a h
2
. El paso mas complicado suele ser el de buscar una relacion entre
e
i,j
y Le
i,j
. Sin embargo, existen algunas pocas situaciones peligrosas donde es
imposible encontrar cotas de error como la anterior. La mas importante es si
hay esquinas con angulos internos mayores de 180 grados. En estos casos, hay
que desconar de la solucion cerca de estos puntos
1
.
3.5.1 Anexo: prueba del teorema
Si u es cualquier funcion denida en el conjunto de los nodos
T
h
= T
h
T
h
de la region rectangular 0 x a, 0 y b, se verica
max
D
h
[u[ max
D
h
[u[ +
1
4
(a
2
+b
2
) max
D
h
[Lu[ (3.47)
1
Cosa logica, por otra parte. Recuerdese que en una punta el campo tiende a innito
3.5. ERRORES Y CONVERGENCIA 37
siendo
Lu
i,j
= u
i+1,j
+u
i1,j
+u
i,j+1
+u
i,j1
4u
i,j
(3.48)
Prueba
Defnase la funcion
i,j
mediante la ecuacion:
i,j
=
1
4
_
i
2
+j
2
_
h
2
, (i, j)
T
h
(3.49)
Claramente
0
i,j
1
4
_
a
2
+b
2
_
(i, j)
T
h
(3.50)
Ademas, en todos los puntos (i, j) T
h
L
i,j
=
1
4
_
(i + 1)
2
+j
2
+ (i 1)
2
+j
2
+i
2
+(j + 1)
2
+i
2
+ (j 1)
2
4i
2
4j
2
_
(3.51)
= 1 (3.52)
Defnanse ahora las funciones w
+
y w
mediante
w
+
= u +N y w
= u N (3.53)
donde
N = max
D
h
[Lu
i,j
[ (3.54)
Operando en las ecuaciones (3.53) con L y usando (3.52) se obtiene que:
Lw
i,j
= Lu
i,j
+N 0 (i, j) T
h
(3.55)
donde la desigualdad se sigue de la denicion de N. Pero, por la extension del
principio de maximo expuesta al nal de la seccion anterior, se sigue de esta
ultima inecuacion que w
alcanza su maximo en el contorno. As pues
max
D
h
w
i,j
max
D
h
w
i,j
(3.56)
= max
D
h
(v
i,j
+N
i,j
) (3.57)
max
D
h
[v
i,j
[ + max
D
h
N[
i,j
[ (3.58)
max
D
h
[v
i,j
[ +
1
4
_
a
2
+b
2
_
N (3.59)
donde, para dar el ultimo paso, se utiliza la expresion (3.50). Por otra parte,
como w
= u N, y N 0, se sigue que u
i,j
w
i,j
. Luego, por (3.53)
38 DIFERENCIAS FINITAS
Figura 3.6: Condiciones de von Neumann no nulas
max
D
h
u
i,j
max
D
h
[v
i,j
[ +
1
4
_
a
2
+b
2
_
N (3.60)
Es decir
max
D
h
[u
i,j
[ max
D
h
[u
i,j
[ +
1
4
(a
2
+b
2
) max
D
h
[Lu
i,j
[ (3.61)
3.6 Problemas con los contornos
Avanzado
_ B asico
En esta seccion se estudian algunos problemas que se pueden presentar en los
contornos. Especcamente, se estudia el tratamiento de condiciones de von
Neumann no nulas y que hacer cuando la malla no se adapta bien al contorno.
Existe, por supuesto, otros problemas distintos a estos que se tratan. Las formu-
las a aplicar en estos casos suelen ser bastante complicadas, aunque, despues de
leer esta seccion, el estudiante interesado no debiera tener dicultades en esta-
blecerlas.
3.6.1 Condiciones de von Neumann no nulas
Considerese la gura 3.6. Se desea encontrar una formula de diferencias nitas
que aproxime la condicion de Dirichlet
V
x
= g(y) en x = x
0
(3.62)
Para obtener la ecuacion en el punto O existen varias posibilidades. Una de
ellas es introducir un punto fantasma F de forma que la ecuacion en O se
reduzca a la formula habitual
3.6. PROBLEMAS CON LOS CONTORNOS 39
1
h
2
(v
F
+v
A
+v
B
+v
C
4v
O
) = f
O
(3.63)
Ahora se tiene una variable mas: el potencial en el nudo fantasma F.
As pues, se necesita una ecuacion adicional para este nudo, que debiera estar
relacionada con la condicion de von Neumann, que no se ha usado todava. Para
ello, considerese de nuevo los desarrollos de Taylor expuestos en la seccion 3.3:
V
i+1,j
= V
i,j
+
V
x
[
i,j
h +
1
2
2
V
x
2
[
i,j
h
2
+
1
6
3
V
x
3
[
i,j
h
3
+
1
24
4
V
x
4
[
1,j
h
4
(3.64)
Donde x(i) <
1
< x(i + 1). Analogamente,
V
i1,j
= V
i,j
V
x
[
i,j
h +
1
2
2
V
x
2
[
i,j
h
2
1
6
3
V
x
3
[
i,j
h
3
+
1
24
4
V
x
4
[
2,j
h
4
(3.65)
Si las dos ecuaciones anteriores se restan se obtiene:
V
i+1,j
V
i1,j
= 2
V
x
[
i,j
h +O(h
3
) (3.66)
siendo O(h
3
) terminos de orden c ubico o superior. Despreciando estos terminos,
se obtiene:
V
x
[
i,j
=
1
h
(V
i+1,j
V
i1,j
) (3.67)
o, en nuestro caso
V
x
[
0
= g
O
=
1
h
(V
A
V
F
) (3.68)
que es la ecuacion adicional buscada.
3.6.2 Tratamiento de contornos curvos
Considerse una malla cuadrada pero con la frontera curva como en la gura 3.7.
Se desea determinar que ecuacion en diferencias nitas hay que aplicar al
nodo O. Aplicando de nuevo el teorema de Taylor:
V
A
= V
O
+h
1
V
x
[
O
+h
2
2
1
2
V
x
2
[
O
+O(h
3
) (3.69)
V
3
= V
O
h
V
x
[
O
+h
2
2
V
x
2
[
O
+O(h
3
) (3.70)
Eliminando
V
x
[
O
se sigue que:
2
V
x
2
[
O
=
1
h
2
_
2
1
(1 +
1
)
V
A
+
2
(1 +
1
)
V
3
1
V
O
_
(3.71)
40 DIFERENCIAS FINITAS
Figura 3.7: Contorno curvo
Realizando cuentas similares en la direccion y, se obtiene la aproximacion a
la ecuacion de Poisson:
2V
A
1
(1 +
1
)
+
2V
B
2
(1 +
2
)
+
2V
3
(1 +
1
)
+
2V
4
(1 +
2
)
= 2
_
1
1
+
1
2
_
V
O
= h
2
f
O
(3.72)
3.7 Diferencias nitas en otros sistemas coorde-
nados
En este captulo se ha venido tratando el analisis de problemas bidimensionales
en coordenadas cartesianas. Hay, sin embargo, circunstancias en que es preciso
tratar problemas de mas dimensiones o en sistemas coordenados no cartesianos.
El establecimiento de las ecuaciones tridimensionales en coordenadas carte-
sianas es bastante trivial: lo unico que hay que hacer es repetir lo que se ha hecho
a nadiendo la coordenada z. En particular, con una malla c ubica se obtiene la
aproximacion a la ecuacion de Laplace:
V
i+1,j,k
+V
i1,j,k
+V
i,j+1,k
+V
i,j1,k
+V
i,j,k+1
+V
i,j,k+1
6V
i,j,k
= 0 (3.73)
en que de nuevo se ve que el potencial central es la media de los adyacentes.
En el caso de coordenadas no cartesianas el analisis es tambien similar. Se
parte de la ecuacion diferencial, cuyas derivadas se aproximan por diferencias
nitas a partir de desarrollos de Taylor en las coordenadas utilizadas. Los dos
siguientes apartados realizan estas aproximaciones, de forma somera, para dos
casos particulares de cierta relevancia. Otros casos se trataran de forma similar.
OTROS SISTEMAS COORDENADOS 41
Figura 3.8: Diferencias nitas en polares
3.7.1 Diferencias nitas en coordenadas polares
En conguraciones con contornos circulares, el uso de coordenadas polares puede
estar indicado. Considerese, por ejemplo, la ecuacion de Laplace:
2
V
r
2
+
1
r
V
r
+
1
r
2
2
V
2
= 0 (3.74)
Defnanse los nodos de la malla en el plano r - por las intersecciones de
los crculos r = ih, (i = 1, 2, . . .) y las lneas rectas = jl, (j = 0, 1, 2, . . .) (ver
la gura 3.8)
La ecuacion de Laplace puede aproximarse entonces por:
(V
i+1,j
2V
i,j
+V
i1,j
)
h
2
+
1
ih
(V
i+1,j
V
i1,j
)
2h
+
1
(ih)
2
(V
i,j+1
2V
i,j
+V
i,j1
)
l
2
= 0
(3.75)
Reordenando terminos
_
1
1
2i
_
V
i1,j
+
_
1 +
1
2i
_
V
i+1,j
2
_
1 +
1
(il)
2
_
V
i,j
+
1
(il)
2
V
i,j1
+
1
(il)
2
V
i,j+1
= 0 (3.76)
Observese que tambien en este caso el potencial central es la media de los que
hay alrededor. Por otra parte, el planteamiento de las condiciones de contorno
es similar al del caso cartesiano.
3.7.2 Diferencias nitas con simetra axial
Existen conguraciones que presentan simetra respecto a un eje. En estos casos,
el uso de coordenadas cilndricas esta indicado. Por ejemplo, la ecuacion de
42 DIFERENCIAS FINITAS
r
z
h
l
Figura 3.9: Diferencias nitas con simetra axial
Laplace en coordenadas cilndricas es:
2
V
r
2
+
1
r
V
r
+
2
V
z
2
= 0 (3.77)
donde se han anulado las derivadas respecto a , debido a la simetra axial de
la conguracion.
Considerese la malla en el plano r - z por las intersecciones de las lneas
r = ih, (i = 0, 1, 2, . . .) y las lneas rectas z = jl, (j = 0, 1, 2, . . .) (ver la gura
3.9)
Una aproximacion en diferencias nitas a esta ecuacion viene dada por:
(V
i+1,j
2V
i,j
+V
i1,j
)
h
2
+
1
ih
(V
i+1,j
V
i1,j
)
2h
+
(V
i,j+1
2V
i,j
+V
i,j1
)
l
2
= 0
(3.78)
Reordenando terminos
1
h
2
_
1
1
2i
_
V
i1,j
+
1
h
2
_
1 +
1
2i
_
V
i+1,j
2
_
1
h
2
+
1
l
2
_
V
i,j
+
1
l
2
V
i,j1
+
1
l
2
V
i,j+1
= 0 (3.79)
Esta ecuacion no es valida en los puntos del eje, donde i = 0. No obstante,
se pueda aplicar a estos nodos la ecuacion de Laplace en cartesianas, puesto que
la malla alrededor de estos nodos en 3 dimensiones en nada se diferencia de una
malla cartesiana (ver gura 3.10). Luego se tiene
OTROS SISTEMAS COORDENADOS 43
Figura 3.10: La malla en el eje
4
h
2
V
i+1,j
_
4
h
2
+
2
l
2
_
V
i,j
+
1
l
2
V
i,j1
+
1
l
2
V
i,j+1
= 0 (3.80)
para los puntos del eje.
44 DIFERENCIAS FINITAS
Captulo 4
Ecuaciones de Laplace y
Poisson: elementos nitos
_ B asico
4.1 Introduccion
En la seccion anterior se estudio una manera de aproximar ecuaciones diferen-
ciales en derivadas parciales mediante un sistema de ecuaciones algebraicas: el
metodo de las diferencias nitas.
Existe otro metodo importante para efectuar la discretizacion de las ecua-
ciones en diferencias nitas: el metodo de los elementos nitos. El proposito de
este captulo es exponer sus fundamentos.
No obstante, antes de comenzar, dos comentarios parecen oportunos. El pri-
mero es que estos dos metodos, aunque sean los mas importantes, no son los
unicos. El segundo es que ambos tienen ventajas e inconvenientes, y que cada
uno esta indicado en diferentes circunstancias. Mas sobre esto sera dicho al nal
del presente captulo.
4.2 Forma variacional de la ecuacion de Poisson
La base del metodo de los elementos nitos se basa en la posibilidad de replan-
tear el problema de Poisson:
(V ) = f en T
sujeto a V = g en T
1
V
n
= h en T
2
(4.1)
como un problema de optimizacion. En efecto, considerese el siguiente problema:
mn
V
F =
1
2
___
D
(V )
2
dv
___
D
fV dv
__
D2
hV ds
45
46 ELEMENTOS FINITOS
sujeto a V = g en T
1
(4.2)
Es este un problema de optimizacion funcional: se trata de encontrar la
funcion V (x, y, z) que cumpla la restriccion y minimice el funcional
1
F(V ). Es
decir, para cada V que cumpla ser igual a g en la frontera T
1
, se puede calcular
un n umero real F (ya que f y h son datos). Despues se escoge la V que de el F
mas peque no. El resto de esta seccion se empleara en demostrar que la funcion
buscada V verica la ecuacion de Poisson.
Sea V
la solucion de la ecuacion de Poisson (4.1). Cualquier funcion V en
la ecuacion (4.2) puede escribirse como
V = V
+V (4.3)
Por supuesto, tanto V como V
tienen que cumplir la restriccion
V = V
= g en T
1
(4.4)
Por tanto
V
+V = V
= gen T
1
(4.5)
Luego
V = 0 en T
1
(4.6)
Escrbase el funcional F(V ) como la suma de tres terminos
F(V ) = F
1
(V ) +F
2
(V ) +F
3
(V ) (4.7)
F
1
(V ) =
1
2
___
D
(V )
2
dv (4.8)
F
2
(V ) =
___
D
fV dv (4.9)
F
3
(V ) =
__
D2
hV ds
(4.10)
Se estudian ahora cada uno de los tres terminos
F
1
(V ). Se tiene que
F
1
(V ) =
1
2
___
D
(V )
2
dv (4.11)
=
1
2
___
D
((V
+V ))
2
dv (4.12)
1
Un funcional es una funcionque asigna a una funcion un n umero.
4.2. FORMA VARIACIONAL DE LA ECUACI
ON DE POISSON 47
=
1
2
___
D
(V
)
2
dv +
1
2
___
D
(V )
2
dv +
___
D
(V
) (V ) dv (4.13)
=
1
2
___
D
(V
)
2
dv +
1
2
___
D
(V )
2
dv +
___
D
(V V
) dv
___
D
V (V
) dv (4.14)
=
1
2
___
D
(V
)
2
dv +
1
2
___
D
(V )
2
dv +
_
__
D
(V V
) ds
___
D
V f dv (4.15)
=
1
2
___
D
(V
)
2
dv +
1
2
___
D
(V )
2
dv
__
D2
V
V
n
ds
___
D
V f dv (4.16)
=
1
2
___
D
(V
)
2
dv +
1
2
___
D
(V )
2
dv
__
D2
V h
___
D
V f dv (4.17)
Para realizar este desarrollo se ha aplicado para pasar de (4.13) a (4.14)
la formula de integracion por partes
2
; para pasar de (4.14) a (4.15), el
teorema de Gauss y el hecho de que V
verica la ecuacion de Poisson;
para pasar de (4.15) a (4.16) la condicion de contorno de que V se ha de
anular en T
1
; y por ultimo, para pasar de (4.16) a (4.17), la condicion
de contorno que verica V
en T
2
.
F
2
(V ). En este caso
F
2
(V ) =
___
D
fV dv (4.18)
=
___
D
fV
dv +
___
D
fV dv (4.19)
Finalmente F
3
(V )
F
3
(V ) =
__
D2
hV ds (4.20)
=
__
D2
hV
ds +
__
D2
hV ds (4.21)
2
O sea, (AB) = (A)(B) +AB. Para probar esta formula, basta con escribir los
operadores diferenciales en, por ejemplo, cartesianas y operar.
48 ELEMENTOS FINITOS
Sumando ahora F
1
, F
2
y F
3
:
F(V ) = F
1
(V ) +F
2
(V ) +F
3
(V ) (4.22)
=
1
2
___
D
(V
)
2
dv +
1
2
___
D
(V )
2
dv
__
D2
V h
___
D
V f dv +
___
D
fV
dv +
___
D
fV dv +
__
D2
hV
ds +
__
D2
hV ds
=
1
2
___
D
(V
)
2
dv +
___
D
fV
dv +
__
D2
hV
ds +
1
2
___
D
(V )
2
dv (4.23)
= F(V
) +
1
2
___
D
(V )
2
dv (4.24)
Se observa que F tiene un mnimo para V = V
, ya que la segunda integral
es positiva para cualquier V ,= 0 puesto que > 0. Pero esto es equivalente
a decir que la solucion a la ecuacion de Poisson (4.1) es la misma que la del
problema (4.2).
Al llegar aqu, se hace necesario introducir alguna nomenclatura. Las ecuacio-
nes (4.1) y (4.2) son, como se ha visto, esencialmente la misma. As, la ecuacion
(4.1) es conocida como la forma fuerte, y la (4.2) como la forma debil de la ecua-
cion. Hay tambien dos tipos de condiciones iniciales. Unas (en este caso, las de
Dirichlet) tienen que ser introducidas como una restriccion adicional en la forma
debil. Estas condiciones de contorno son conocidas como condiciones esencia-
les. Existen otras (en el caso presente, las de von Neumann) que se introducen
en la forma debil dentro del funcional F(V ) a minimizar. Estas condiciones se
conocen como naturales.
En general, cuando se consigue reformular un problema de campos como
la minimizacion de determinado funcional, se dice que se ha obtenido la forma
variacional de problema. En nuestro caso particular, se puede comprobar que el
funcional F tiene dimensiones de energa. De hecho, lo unico que se ha hecho es
establecer el principio de trabajos virtuales para este problema particular.
4.3 Aproximacion funcional
La forma debil (4.2) es la base para el desarrollo del metodo de los elementos
nitos. Sin embargo, esta expresion da la solucion como el mnimo sobre el
4.3. APROXIMACI
ON FUNCIONAL 49
conjunto de todas las funciones
3
. Este es, por supuesto, un conjunto innito. Lo
que se hace entonces es aproximar la funcion V como una suma de funciones
conocidas, preestablecidas:
V (x, y, z) = V
0
(x, y, z) +
i
a
i
V
i
(x, y, z) (4.25)
En esta expresion, las funciones V
0
y V
i
son conocidas, y lo que se va a
intentar es encontrar los coecientes, los n umeros reales a
i
, que mejor aproximen
la funcion solucion V
.
La funcion V
0
se diferencia de las funciones V
i
en lo siguiente: V
0
verica las
condiciones de contorno esenciales:
V
0
= g en T
1
(4.26)
mientras que las V
i
verican condiciones nulas en el mismo contorno
V
i
= 0 en T
1
(4.27)
Es claro, por tanto, que V verica las condiciones esenciales. Substituyendo
la aproximacion en el funcional a minimizar se obtiene:
F(V ) =
1
2
___
D
(V )
2
dv
___
D
fV dv
__
D2
hV ds (4.28)
=
1
2
___
D
_
(V
0
+
i
a
i
V
i
)
_
2
dv
___
D
(V
0
+
i
a
i
V
i
)f dv
__
D2
(V
0
+
i
a
i
V
i
)h ds (4.29)
=
1
2
___
D
(V
0
)
2
dv +
i
a
i
___
D
(V
0
V
i
) dv +
1
2
j
a
i
a
j
___
D
V
i
V
j
dv
___
D
V
0
f dv
i
a
i
___
D
V
i
f dv
__
D2
V
0
h ds
i
a
i
__
D2
V
i
h ds (4.30)
=
1
2
j
a
i
a
j
___
D
V
i
V
j
dv +
3
O mas bien, las funciones derivables que sean ademas integrables en D, para que la forma
debil tenga sentido. Aunque la caracterizacion rigurosa del conjunto de funciones admisibles
es importante para demostrar la consistencia matematica del esquema, aqu se adoptara un
punto de vista menos riguroso, y se supondra que todas las funciones consideradas se pueden
derivar e integrar sin problemas.
50 ELEMENTOS FINITOS
i
a
i
____
D
V
0
V
i
dv
___
D
V
i
f dv
__
D2
V
i
h ds
_
+
_
1
2
___
D
(V
0
)
2
dv
___
D
V
0
f dv
__
D2
V
0
h ds
_
(4.31)
=
1
2
_
_
j
a
i
a
j
K
i,j
_
_
+
_
i
a
i
b
i
_
+c (4.32)
donde, en la ultima lnea, se han denido las cantidades:
K
i,j
=
___
D
V
i
V
j
dv (4.33)
b
i
=
____
D
(V
0
V
i
) dv
___
D
V
i
f dv
__
D2
V
i
h ds
_
(4.34)
c =
_
1
2
___
D
(V
0
)
2
dv
___
D
V
0
f dv
__
D2
V
0
h ds
_
(4.35)
En forma matricial, la ecuacion (4.32) puede escribirse como
F =
1
2
a
T
Ka +b
T
a +c (4.36)
donde es claro que a es el vector columna de componentes a
i
, b el de compo-
nentes b
i
, K la matriz cuyos elementos son K
i,j
y el superndice T denota la
transposicion.
F es una funcion de a, ya que las cantidades K, b y c solamente dependen
del problema y de las funciones V
0
y V
i
, que son conocidas. Por otra parte,
sabemos que la soluci on de la ecuacion de Poisson es la funcion que minimiza
F. Por tanto, los coecientes a
i
buscados seran aquellos que minimicen F, es
decir, que se ha de cumplir:
F
a
i
= 0 i (4.37)
o, en forma matricial
Ka +b = 0 (4.38)
Luego los a
+
i
buscados seran
a
+
= K
1
b (4.39)
y la solucion
V
+
= V
0
+
i
a
+
i
V
i
(4.40)
4.3. APROXIMACI
ON FUNCIONAL 51
La solucion aproximada V
+
no es la solucion exacta V
, ya que esta ultima
es el mnimo sobre todas las funciones que cumplen las condiciones de contorno
esenciales, mientras que V
+
es el mnimo sobre un subconjunto de estas: las que
se pueden generar con V
0
y las V
i
. Sin embargo, si el conjunto de funciones V
i
es lo bastante grande, la solucion aproximada V
+
no sera muy distinta de la
solucion V
.
4.3.1 Un ejemplo
Sea el problema de Poisson
_
_
_
d
2
V
dx
2
= x(1 x) x [0, 1]
V (0) = 0
V (1) = 1
(4.41)
Este es un problema en una sola dimension. El dominio T es el segmento
[0, 1], y la supercie que lo encierra los dos puntos x = 0 y x = 1, donde se
nos dan condiciones de contorno esenciales. La teora explicada anteriormente se
aplica tambien a este caso, sin mas que substituir las integrales de volumen por
integrales de lnea, y las integrales de supercie por los valores de las funciones
en los puntos extremos del intervalo
4
.
De todas formas, para el problema (4.41) es facil encontrar una solucion
analtica integrando la ecuacion diferencial. Se obtiene as:
V (x) =
1
12
x
4
+
1
6
x
3
+
11
12
x (4.42)
Se va ahora a obtener una solucion aproximada por el metodo variacional.
Se ha de desarrollar V como
V = V
0
+
i
a
i
V
i
(4.43)
V
0
ha de cumplir las condiciones de contorno esenciales. Una posibilidad
sencilla es:
V
0
(x) = x (4.44)
En efecto V
0
(0) = 0 y V
0
(1) = 1, que son las condiciones esenciales. Por otra
parte, las V
i
han de tener condiciones esenciales nulas. Se escogen as:
V
i
(x) = sin (ix) (4.45)
ya que V
i
(0) = V
i
(1) = 0.
Ahora se puede proceder al calculo de la matriz K y del vector b. Recuerdese
que se obtuvo que
4
De todas formas, el lector interesado puede rehacer los desarrollos anteriores para el caso
monodimensional, mas sencillo.
52 ELEMENTOS FINITOS
K
i,j
=
___
D
V
i
V
j
dv (4.46)
Luego
K
i,j
=
_
1
0
dV
i
dx
dV
j
dx
dx
=
_
1
0
_
d
dx
sin(ix)
__
d
dx
sin(jx)
_
dx
=
_
1
0
i sin(ix)j sin(jx)dx
=
1
2
ij
2
i
2
(4.47)
donde
ij
denota el smbolo de Kronecker (
ij
= 1 si i = j, delta
ij
= 0 si i ,= j).
Por otra parte, se obtuvo antes que
b
i
=
____
D
(V
0
V
i
) dv
___
D
V
i
f dv
__
D2
V
i
h ds
_
(4.48)
En este ejemplo, se tiene pues
b
i
=
_
1
0
_
d
dx
x
__
d
dx
sin(ix)
_
dx
_
1
0
x(1 x) sin(ix) dx
=
_
1
0
i cos(ix) dx
_
1
0
x(1 x) sin(ix) dx
=
_
1
0
x(1 x) sin(ix) dx
=
2
(i)
3
_
1 (1)
i
_
(4.49)
Ahora la ecuacion
Ka
+
= b (4.50)
da
j
K
i,j
a
+
j
= b
i
(4.51)
O sea
j
1
2
ij
2
i
2
a
+
j
=
2
(i)
3
_
1 (1)
i
_
(4.52)
4.3. APROXIMACI
ON FUNCIONAL 53
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
0
0.2
0.4
0.6
0.8
1
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-1
-0.5
0
0.5
1
x 10
-6
Figura 4.1: Solucion analtica y errores de la aproximacion
De donde
a
+
i
=
4
(i)
5
_
1 (1)
i
_
(4.53)
Por tanto, la solucion aproximada es
V = V
0
+
i
a
+
i
V
i
= x +
i
4
(i)
5
_
1 (1)
i
_
sin (ix) (4.54)
En la gura 4.1 se muestra la solucion analtica exacta y el error entre esta y
la aproximada cuando se toman 8 V
i
(i = 1, . . . , 8). Se ve que el error es menor
de una millonesima.
En este ejemplo ha sido facil el calculo de los coecientes a
i
. De hecho,
hay en general dos dicultades para este calculo: la evaluacion de las integrales
necesarias y la resolucion del sistema
Ka
+
= b (4.55)
En nuestro caso, las integrales eran sencillas y, sobre todo, la resolucion de
la ecuacion anterior trivial, debido al factor
ij
en K
i,j
o, dicho de otro modo,
al hecho de que la matriz K era diagonal.
54 ELEMENTOS FINITOS
Funciones que llevan a matrices K diagonales se llaman ortogonales. Una
gran parte de los metodos clasicos de resolucion de ecuaciones de campo estan
relacionados con la determinacion de estas funciones. El encontrarlas analtica-
mente es, en general, una tarea nada trivial y, a menudo, imposible. Solamente
en conguraciones especiales (cilindros, esferas, ...) es ello posible
5
.
Por contra, el metodo de los elementos nitos busca matrices K no diago-
nales, pero si sencillas, utilizando funciones tambien sencillas.
4.4 Nomenclatura y propiedades
La matriz K es conocida como matriz de rigidez, mientras que el vector b recibe
el nombre de vector de fuerzas. Los nombres tienen su origen en problemas
mecanicos, de elasticidad, que fueron para los que se desarrollo originariamente
el metodo.
A partir de la denicion de la matriz de rigidez
K
i,j
=
___
D
V
i
V
j
dv (4.56)
se observa que es simetrica (K
i,j
= K
j,i
). Ademas, ha de ser positiva denida.
Recuerdese que una matriz K es positiva denida si verica que
x
T
Kx > 0 x (4.57)
Supongamos entonces que K no es positiva denida. Entonces, existe alg un
y tal que
y
T
Ky 0 (4.58)
Hay pues dos posibilidades: que se verique el signo < o el =. Supongase
primero que
y
T
Ky < 0 (4.59)
Considerese entonces el valor del funcional a minimizar
F(y) =
2
y
T
Ky +y
T
b +c (4.60)
Es claro que F puede hacerse tan negativo como se quiera sin mas que
escoger un lo sucientemente grande. Algo similar pasa si es valido el signo
igual. Entonces
F(y) = y
T
b +c (4.61)
de manera que F puede hacerse tan negativo como se quiera escogiendo 0
si b
T
y > 0, o 0 en caso contrario.
5
Para los cilindros se han de emplear funciones de Bessel, y para las esferas armonicos
esfericos.
4.5. EL ESPACIO DE FUNCIONES ADMISIBLES 55
En cualquier caso, F puede hacerse tan negativo como se quiera. Pero este
F esta acotado inferiormente, puesto que no es mas que una aproximacion al
funcional que se obtiene cuando se consideran todas las funciones posibles, que
adquiere su valor mnimo cuando se le da como argumento la solucion de la
ecuacion de Poisson. Esta contradiccion prueba que K es denida positiva.
En particular, como K es positiva denida, K
1
existe siempre.
4.5 El espacio de funciones admisibles
Poco se ha dicho hasta aqu de cuales deben ser las caractersticas que han
de cumplir las funciones V
i
. Por una parte, se sabe que la solucion V
de la
forma fuerte (4.1) debe ser dos veces derivable
6
, por lo que al menos debieran
incluirse como posibles V
i
las funciones con dos derivadas bien denidas. Pero
por otra parte, en la forma debil (4.2) solamente aparecer derivadas primeras,
lo que sugiere que el espacio de posibles funciones V
i
debiera ampliarse hasta
las funciones que tienen primera derivada, a un cuando no tengan bien denida
la segunda.
No existe aqu el proposito de denir con rigor la naturaleza del espacio de
funciones V
i
admisibles. Sin embargo, si se justicara la posibilidad de usar una
clase particular de funciones: las funciones continuas que ademas tienen derivada
segunda a trozos
7
.
La idea es dividir el dominio de denicion de V
i
en varias piezas. Por ejemplo,
en 1 dimension en intervalos, en 2 en un teselado de polgonos, en tres en un
conjunto de poliedros. Ahora, dentro de cada intervalo, polgono o poliedro,
V
i
tiene que ser 2 veces derivable, aunque puede haber discontinuidades en la
segunda derivada al pasar de un intervalo, polgono o poliedro a otro. La funcion
V
i
tiene que ser, de todas formas, continua en todo el dominio del problema.
Por ejemplo, la gura 4.2 muestra una de estas funciones para el caso uni-
dimensional:
f(x) =
_
0 x 0
x x > 0
(4.62)
Esta funcion es, en efecto, continua y tiene denidas las derivadas primera y
segunda en todas partes, salvo en x = 0, es decir, tiene denidas las dos primeras
derivadas a trozos.
B asico
_ Avanzado
Esta funcion f podra ser utilizada como una posible funcion V
i
para calcular,
por ejemplo, los elementos de la matriz de rigidez (4.33). Sin embargo, no tiene
derivada en x = 0, con lo que el procedimiento puede parecer sospechoso
8
.
Sin embargo, se puede transformas f en una funcion
f que tiene todas las
derivadas que se requieran en todos los puntos, y es por tanto ciertamente
6
Supuesto que es una vez derivable
7
piecewise en ingles
8
Notese que se demostro la equivalencia entre las formas fuerte y la debil usando ciertas
operaciones diferenciales (integracion por partes, etc.) que requieren que la funcion V tenga
el n umero adecuado de derivadas en todos los puntos.
56 ELEMENTOS FINITOS
x
f
Figura 4.2: Una funcion admisible
admisible, uniendo los dos tramos de f mediante un empalme suave (ver gura
4.2) de anchura . El punto importante es que puede ser tan peque no como se
desee. Pero, los elementos de K o b calculados con f o
f dieren en cantidades
de orden , y por tanto son a todos los efectos equivalentes.
Por ejemplo, supongase que T es el intervalo [1, 1], y que se desea calcular
la integral que aparece en la denicion de la matriz de rigidez
I(f) =
_
1
1
_
df
dx
_
2
dx =
1
2
(4.63)
Si se calcula esta integral con
f se obtiene:
I(
f) =
_
1
1
_
d
f
dx
_
2
dx
=
_
1
_
d
f
dx
_
2
dx +
_
_
d
f
dx
_
2
dx +
_
1
_
d
f
dx
_
2
dx
=
1
2
_
1
2
_
+
_
_
d
f
dx
_
2
dx (4.64)
Por otra parte, en el intervalo [, ]
4.5. EL ESPACIO DE FUNCIONES ADMISIBLES 57
x
f
Figura 4.3: Una funcion no admisible
0
d
f
dx
1 (4.65)
Por tanto
0
_
_
d
f
dx
_
2
dx 2 (4.66)
Luego
1
2
_
1
2
_
I(
f)
1
2
_
1 + 4 +
2
_
(4.67)
Finalmente
[I(f) I(
f)[ 2 +
1
2
2
(4.68)
Como puede ser tan peque no como se quiera, es claro que ambas integrales
son esencialmente iguales, y por lo tanto los elementos correspondientes de la
matriz de rigidez. Por otra parte, el argumento es de un caracter general, valido
para todos los elementos de K y b, por lo que queda demostrado que la clase
considerada de funciones denidas a trozos es admisible.
El argumento que se acaba de indicar no es, sin embargo, valido con funciones
discontinuas, que no son admisibles. Por ejemplo, considerese la funcion escalon
de la gura 4.3:
58 ELEMENTOS FINITOS
f(x) =
_
0 x 0
1 x > 0
(4.69)
Esta funcion puede aproximarse mediante la funcion admisible
f(x) =
_
_
_
0 x
1
2
+
1
2
x < x
1 x >
(4.70)
f es una funcion admisible, ya que es continua y tiene derivada segunda a
trozos. Por otra parte, es claro que aproxima a f como va tendiendo a cero.
Sin embargo, ahora se tiene
I(
f) =
_
1
1
_
d
f
dx
_
2
dx
=
_
1
_
d
f
dx
_
2
dx +
_
_
d
f
dx
_
2
dx +
_
1
_
d
f
dx
_
2
dx
=
_
_
d
f
dx
_
2
dx
=
1
2
(4.71)
Ahora la integral I, y por tanto el elemento correspondiente de la matriz de
rigidez K (y, en general, todos aquellos elementos de K y b donde intervenga
f) no estan denidos, tienden a innito conforme tiende a cero. Por tanto, f
no es una funcion V
i
admisible.
4.6 Elementos nitos triangulares
Avanzado
_ B asico
Ha llegado ya el momento de escoger unas funciones V
i
concretas. Estas fun-
ciones deberan dar una matriz de rigidez K que sea sencilla. Esto signica,
basicamente, que debera tener muchos ceros, es decir, debera ser una matriz
rala. Por otra parte, las propias funciones V
i
deberan ser tambien sencillas, para
poder calcular facilmente los valores K
i,j
y b
i
, que resultan de hacer integrales
con estas funciones.
Una forma sencilla de cumplir estos requisitos en dos dimensiones, aunque
muy a menudo ecaz, es la utilizacion de los llamados elementos triangulares.
En esta seccion se estudiaran estos elementos.
Ante todo es necesario triangularizar el dominio donde queremos resolver la
ecuacion, es decir, dividirlo en triangulos tal como muestra la gura 4.4, a la
derecha. Se requiere para las triangularizaciones admisibles que cada triangulo
no tenga mas nodos de la red que sus vertices.
4.6. ELEMENTOS FINITOS TRIANGULARES 59
Figura 4.4: Triangularizaciones admisibles e inadmisibles.
Figura 4.5: Funcion V
i
Las funciones V
i
son piramides. Cada piramide tiene su vertice encima de
un nodo de la red, mientras que su base esta formada por todos los triangulos
que coinciden en el vertice. La altura de la piramide es 1. La gura 4.5 muestra
una de estas V
i
. Por supuesto, puede considerarse que V
i
fuera del polgono que
forma la base de la piramide vale 0, con lo que V
i
es una funcion continua con
derivada segunda a trozos en todo el dominio T.
El potencial se aproxima mediante una serie
V =
m
i=1
a
i
V
i
(4.72)
En este caso, las a
i
tienen ademas un signicado sencillo: es el valor de V en
el vertice i-esimo. En efecto, en este vertice todas las V s salvo la i-esima valen
0. Es por ello, que las a
i
son llamadas variables nodales.
De entre todos los vertices, existiran un subconjunto que se encontraran en
60 ELEMENTOS FINITOS
el contorno donde se aplican condiciones de contorno esenciales. En estos nodos
el valor de V , y por lo tanto el valor de los a
i
correspondientes es conocido.
Dividanse entonces los nodos en dos conjuntos: uno formado por n nodos donde
no existen condiciones de contorno esenciales, y por tanto las a
i
son incognita;
y otro formado por los mn nodos restantes en el contorno esencial. Entonces:
V =
n
i=1
a
i
V
i
+
m
i=n+1
a
i
V
i
(4.73)
=
n
i=1
a
i
V
i
+V
0
(4.74)
V
0
es conocido, puesto que se conocen las a
i
correspondientes. Se podra, a
partir de aqu, calcular la matriz K y el vector b. Sin embargo, es mas conve-
niente hacer estas operaciones de una forma menos directa.
Considerese, entonces, cada uno de los triangulos que forman la red. Cada
uno de ellos se llamara un elemento, y se denotara al i-esimo elemento T
i
. Si
hay en total N elementos, se tiene que
___
D
. . . dv =
N
i=1
___
Ti
. . . dv (4.75)
Dentro de cada elemento, las piramides son planos. Esto permite calcular las
integrales de forma muy ecaz.
B asico
_ Avanzado
Especcamente: sean (x, y)
1
, (x, y)
2
y (x, y)
3
las coordenadas de los tres
vertices del elemento T
i
. Sea V
j1
la piramide cuyo vertice esta en el punto 1.
Entonces, la funcion V
j1
restringida al elemento T
i
es
V
j1
[
Ti
= T
j1
=
1
(x
1
x
2
)(y
1
y
3
) (x
1
x
3
)(y
1
y
2
)
[(y
2
y
3
)x (x
2
x
3
)y+ (4.76)
1
2
((y
2
+y
3
)(x
2
x
3
) (x
2
+x
3
)(y
2
y
3
))
_
(4.77)
Esta ecuacion se ha deducido de la siguiente manera: dado que es un plano
tiene que ser de la forma T
j1
= ax + by + c. Por otra parte, T
j1
vale 1 en el
nodo 1( el vertice de la piramide ), y 0 en los nodos 2 y 3, que estan en la base
de la piramide. Estas tres condiciones permiten despejar a, b y c, resultando la
ecuacion anterior. De manera analoga se calculan T
j2
y T
j3
.
Cada funcion T
j
es llamada funcion de forma. Con su ayuda es ya facil
calcular la matriz de rigidez y el vector de fuerzas. En efecto, aplicando las
ecuaciones (4.56 y (4.75):
4.6. ELEMENTOS FINITOS TRIANGULARES 61
K
i,j
=
__
D
V
i
V
j
ds
=
N
k=1
__
T
k
V
i
V
j
ds (4.78)
(4.79)
Dentro de cada elemento solamente hace falta considerar 3 V
i
s: las tres
piramides con vertice en cada uno de los tres vertices del elemento. En efecto,
el resto de las piramides valen 0 en ese elemento. Entonces, la matriz de rigidez
elemental
K
k
i,j
=
__
T
k
V
i
V
j
ds (4.80)
es, esencialmente, una matriz de 3 3 (o, si se quiere, una matriz n n pero
que solo tiene elementos no nulos en la submatriz correspondiente a los tres
vertices del elemento). Mas a un, las funciones V
i
restringidas al elemento son
las funciones de forma. As pues, se tiene por ejemplo que
K
k
i1,i2
=
__
T
k
T
i1
T
i2
ds (4.81)
y de forma analoga los elementos K
k
i1,i1
, K
k
i1,i3
, etc.
Las funciones de forma son funciones lineales, por lo que sus derivadas son
constantes. As pues, la integracion es simplemente una constante por el area
del triangulo. Especcamente:
K
k
i1,i2
=
__
T
k
_
T
i1
x
T
i2
x
+
T
i1
y
T
i2
y
_
ds
=
__
T
k
1
(x
1
x
2
)(y
1
y
3
) (x
1
x
3
)(y
1
y
2
)
1
(x
2
x
3
)(y
2
y
1
) (x
2
x
1
)(y
2
y
3
)
((y
2
y
3
)(y
3
y
1
) + (x
2
x
3
)(x
3
x
1
)) ds
=
1
(x
1
x
2
)(y
1
y
3
) (x
1
x
3
)(y
1
y
2
)
1
(x
2
x
3
)(y
2
y
1
) (x
2
x
1
)(y
2
y
3
)
((y
2
y
3
)(y
3
y
1
) + (x
2
x
3
)(x
3
x
1
)) (4.82)
__
T
k
ds
=
1
(x
1
x
2
)(y
1
y
3
) (x
1
x
3
)(y
1
y
2
)
62 ELEMENTOS FINITOS
1
(x
2
x
3
)(y
2
y
1
) (x
2
x
1
)(y
2
y
3
)
((y
2
y
3
)(y
3
y
1
) + (x
2
x
3
)(x
3
x
1
))
1
2
((x
1
x
2
)(y
1
y
3
) (x
1
x
3
)(y
1
y
2
))
=
2
(y
2
y
3
)(y
3
y
1
) + (x
2
x
3
)(x
3
x
1
)
(x
2
x
3
)(y
2
y
1
) (x
2
x
1
)(y
2
y
3
)
(4.83)
Se ha supuesto que es constante en todo el elemento, lo que suele ser
habitual. Si no lo fuera, habra que calcular la integral teniendo en cuenta esta
dependencia.
Se tiene ya calculada la matriz de rigidez elemental K
k
para cada elemento.
Es ahora preciso juntar estas matrices elementales a n de obtener la matriz de
rigidez total K. Esto se realiza empleando la expresion (4.79):
K
i,j
=
N
k=1
__
T
k
V
i
V
j
ds =
N
k=1
K
k
i,j
(4.84)
Recuerdese que cada matriz K
k
se puede interpretar como una matriz que
solo tiene elementos no nulos en las posiciones que corresponden a las variables
nodales del elemento k. Supongase, entonces, que se tiene una lista de elementos
tal como:
Elemento 1 Vertices 3,1,2
Elemento 2 Vertices 3,4,2
. . . . . .
Elemento N Vertices 4,5,n
Al combinar las matrices K
k
correspondientes a estos elementos se ob-
tendra una matriz de rigidez de la forma:
K
1
+K
2
+K
N
=
_
_
1 1 1 . . .
1 1 + 2 1 + 2 2 . . .
1 1 + 2 1 + 2 2 . . .
2 2 2 +N N . . . N
N N . . . N
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
N N . . . N
_
_
(4.85)
donde los n umeros indican las posiciones donde aparecen terminos provenientes
de cada K
k
.
El ensamblaje del vector de fuerzas se realiza de una forma similar. Re-
cuerdese que
4.6. ELEMENTOS FINITOS TRIANGULARES 63
b
i
=
___
D
(V
0
V
i
) ds
__
D
V
i
f ds
_
D2
V
i
h dl
_
(4.86)
=
N
k=1
___
T
k1
(V
0
V
i
) ds
__
T
k
V
i
f ds
_
T
k2
V
i
h dl
_
(4.87)
=
N
k=1
b
k
i
(4.88)
En esta expresion se han denotado por T
k2
los elementos que tienen alg un
lado en un contorno natural y por T
k2
el contorno natural del elemento k. Puede
haber elementos tengan ambos tipos de contornos. Conocidas las funciones V
0
,
f y h, pueden evaluarse todas las integrales por alg un procedimiento numerico.
En el caso de tener una malla lo sucientemente na, las funciones h y f
se pueden considerar constantes, que salen por tanto fuera de la integral. Esto
simplica mucho el calculo del vector de fuerzas, puesto que queda tan solo
unas integrales sobre las funciones V
i
asociadas al elemento, que son sencillas
de calcular. En particular
__
T
k
V
i
ds =
1
2
supercie elemento (4.89)
y
_
T
k2
V
i
dl
1
2
longitud lado (4.90)
Por otra parte, la funcion V
0
en la integral (4.87) puede ser escrita como
V
0
= (a
i1
V
i1
+a
i2
V
i2
)[
T
k
(4.91)
= (a
j1
T
i1
+a
i2
T
i2
) (4.92)
donde i1 y i2 son los dos vertices que limitan el segmento del elemento k que
cae sobre el contorno esencial, y T
i1
y T
i2
las respectivas funciones de forma.
Las constantes a
i1
y a
i2
son el valor de V en los nodos i1 e i2, que es conocido.
Es claro que la unica V
i
que entra en la integral (4.87) es la que corresponde
al tercer vertice del elemento: V
j3
. Por tanto
__
T
k1
(V
0
V
j3
) ds = (4.93)
a
j1
__
T
k1
(T
j1
T
j3
) ds +a
j2
__
T
k1
(T
j1
T
j3
) ds (4.94)
Las dos integrales de la segunda lnea se eval uan como en (4.83).
64 ELEMENTOS FINITOS
Figura 4.6: Elemento triangular cuadratico
Con esto, se han calculado ya la matriz K y el vector b, y queda por resolver
la ecuacion
Ka = b (4.95)
4.7 Otros elementos
Los elementos que se acaban de estudiar son elementos triangulares lineales. Se
pueden generar otra serie de elementos para problemas planos substituyendo los
triangulos por otros polgonos o las funciones lineales por polinomios de mayor
grado.
Una opcion es, por ejemplo, seguir utilizando triangulos pero utilizar como
funciones de forma, en vez de planos, funciones cuadraticas. Un elemento cuadrati-
co general tiene la expresion
a +bx +cy +dx
2
+exy +fy
2
(4.96)
por lo que existen 6 coecientes a identicar (a, b, c, d, e, f). En el caso de los
elementos lineales, solamente existan tres coecientes. Tambien haba tres va-
riables nodales por elemento: los valores de V en cada uno de los vertices. De
hecho, cada funcion de forma vala 1 en su vertice y 0 en los otros dos. Esto
se puede generalizar al caso cuadratico, pero ahora es preciso escoger 6 vertices.
Lo adecuado es escoger los tres vertices y los tres puntos medios de los lados,
tal como se muestra en la gura 4.6.
Para cada nodo, es posible conseguir un polinomio cuadratico que valga 1
en el nodo considerado y 0 en los demas, ya que esto nos da 6 ecuaciones para
las 6 incognitas a, b, c, d, e, f. Las funciones de forma son estos polinomios.
En el caso del elemento triangular lineal, las funciones de forma estaban
coordinadas porque cada variable nodal (cada vertice) esta compartida por tres
4.7. OTROS ELEMENTOS 65
Figura 4.7: Elemento cuadrilatero bilineal
elementos. Juntando las tres funciones de forma que conuan en cada vertice se
obtenan funciones V
i
en forma de piramide. En el caso cuadratico las cosas son
muy similares. Cada variable nodal esta compartida por dos o tres elementos, lo
que junta las funciones de forma para crear V
i
que tienen forma de piramides
con las caras alabeadas.
Al construir, de la misma manera que antes, las matrices de rigidez elemen-
tales se obtienen matrices de 6 6, de forma analoga a como antes se obtenan
de 3 3. El ensamblamiento de estas matrices es analogo al estudiado antes.
La teora es ahora generalizable a polinomios de mayor grado. Se hace preci-
so, eso s, introducir un mayor n umero de variables nodales. Por otra parte, las
matrices elementales son tambien de dimension cada vez mayor. Esto signica
que la matriz de rigidez total tiene cada vez un n umero de ceros menor. Por lo
tanto, elementos de un orden elevado tienen una utilidad muy limitada, al no
dar lugar a matrices lo sucientemente ralas.
Otra posibilidad es cambiar la forma del elemento. En dos dimensiones,
ademas de triangulos, tan solo se usan, normalmente, rectangulos. La posibilidad
mas sencilla es usar como variables nodales los cuatro vertices. Esto signica que
no se pueden usar funciones de forma lineales, que tienen tres coecientes y por
tanto se quedan cortas, ni cuadraticas, que con seis se pasan. La solucion
es usar polinomios bilineales
a +bx +cy +dxy (4.97)
Estos polinomios se llaman bilineales porque son lineales en x e y separada-
mente. De nuevo, es posible encontrar para cada vertice un polinomio bilineal
que valga 1 en el vertice considerado y 0 en el resto.
Se pueden ahora generalizar la teora a elementos bicuadraticos, bic ubicos,
etc, en rectangulos a nadiendo el n umero adecuado de variables nodales. Es tam-
bien posible combinar elementos triangulo y rectangulo.
66 ELEMENTOS FINITOS
Notese que se esta utilizando siempre como coecientes a
i
del desarrollo V =
V
0
+
i
a
i
V
i
el valor de V en determinados nodos. Es importante hacerlo as,
ya que esto facilita muchsimo el asegurarse de que las funciones V
i
construidas
a partir de las funciones de forma de cada elemento son admisibles
9
.
En tres dimensiones la teora es muy parecida. Los elementos triangulo pasan
a ser tetraedros, pudiendo ser tambien lineales, cuadraticos, c ubicos, etc. Los
rectangulos se transforman en paraleleppedos bilineales, bicuadraticos, bic ubi-
cos, etc.
Mencion especial merecen los elementos usados en problemas con simetra
axial, conocidos como elementos axisimetricos. En estos casos es conveniente uti-
lizar coordenadas cilndricas, con el eje de simetra como coordenada z. Ademas
existen las coordenadas r y , siendo la derivada respecto a nula debido a la
simetra axial.
En estos casos, el problema queda reducido a un problema en dos dimensiones
en el plano z r. Puede utilizarse cualquier elemento plano, pero modicando
adecuadamente las integrales que denen K y b. Por ejemplo, se tiene que
K
i,j
=
___
D
V
i
V
j
dv
=
___
D3
1
r
2
_
r
(rV
i
) +
z
(zV
i
)
__
r
(rV
j
) +
z
(zV
j
)
_
dr dz rd
= 2
__
D2
1
r
_
r
(rV
i
) +
z
(zV
i
)
__
r
(rV
j
) +
z
(zV
j
)
_
dr dz
La ultima lnea es la integral que se hace en el plano rz, pudiendose utilizar
las funciones V
i
vista en el caso bidimensional.
4.8 Errores y convergencia
Sea V
la solucion de la ecuacion de Poisson. Se sabe que V
minimiza el
funcional F que se dene como
F(V ) =
1
2
___
D
(V )
2
dv
___
D
fV dv
__
D2
hV ds
sujeto a V = g en T
1
(4.98)
Por tanto, al ser V
el minimizador, se ha de cumplir para cualquier funcion
V que cumpla las condiciones de contorno esenciales
F(V
) F(V ) F(V ) F(V
) > 0 (4.99)
9
No obstante, es tambien frecuente, para algunos elementos de orden elevado, usar los
valores de las derivadas de V en ciertos nodos como coecientes del desarrollo. La razon
ultima de hacerlo as suele ser similar a la dada.
4.8. ERRORES Y CONVERGENCIA 67
La cantidad E = F(V )F(V
) mide as la bondad de V como aproximacion
de la solucion. En el caso de la ecuacion de Poisson E admite una expresion
particularmente sencilla. En efecto
F(V ) F(V
) =
1
2
___
D
(V )
2
dv
___
D
fV dv
__
D2
hV ds
1
2
___
D
(V
)
2
dv
___
D
fV
dv
__
D2
hV
ds (4.100)
=
1
2
___
D
((V V
))
2
dv
___
D
f(V V
) dv
__
D2
h(V V
) ds +
___
D
V V
dv (4.101)
=
1
2
___
D
((V V
))
2
dv
___
D
f(V V
) dv
__
D2
h(V V
) ds +
___
D
(V V
) dv
___
D
V V
dv (4.102)
=
1
2
___
D
((V V
))
2
dv
___
D
f(V V
) dv
__
D2
h(V V
) ds +
_
__
D
V V
ds +
___
D
V f dv (4.103)
=
1
2
___
D
((V V
))
2
dv +
___
D
fV
dv
__
D2
h(V V
) ds +
__
D1
V V
ds +
__
D2
V h ds (4.104)
=
1
2
___
D
((V V
))
2
dv +
___
D
fV
dv +
__
D2
hV
ds +
__
D1
gV
ds (4.105)
As pues
F(V ) F(V
) = E(V ) =
1
2
___
D
((V V
))
2
dv +C (4.106)
siendo la constante C (no depende de V )
C =
___
D
fV
dv +
__
D2
hV
ds +
__
D1
gV
ds (4.107)
Por otra parte E(V
) = F(V
) F(V
) = 0. Como
1
2
___
D
((V
))
2
dv = 0 (4.108)
68 ELEMENTOS FINITOS
se sigue que C = 0.
Se ve entonces que el error E no es mas que como el error cuadratico, total
o medio(si se divide por
_
D
dv) a la solucion. Por otra parte, la cantidad
E(V ) tiene dimensiones de energa. Es por ello que se suele llamar la energa de
tension
10
.
Considerese ahora la aproximacion a la solucion obtenida con elementos
nitos V
+
. Se puede escribir como
V
+
= V
0
+
i
a
i
V
i
(4.109)
y se considera tambien otra combinacion de las V
i
V
a
= V
0
+
i
b
i
V
i
(4.110)
El metodo de los elementos nitos minimiza F(v). Luego
F(V
+
) F(V
a
) V
a
(4.111)
Se sigue entonces que
F(V
+
) F(V
) F(V
a
) F(V
) E(V
+
) E(V
a
) (4.112)
Es decir, el metodo de los elementos nitos calcula la combinacion de fun-
ciones V
i
que tiene la menor diferencia cuadratica media a la solucion. En este
sentido, es un metodo optimo.
Ahora ya es muy facil demostrar que la solucion aproximada de elementos
nitos converge a la solucion del problema conforme se consideran mallas mas
nas. En efecto, considerese que ahora V
a
no es una aproximacion arbitraria
sino la aproximacion que cumple que es igual a V
en los nodos de la malla. De
todas formas, se seguira vericando que E(V
+
) E(V
a
), luego en un sentido
medio V
+
aproxima mejor que V
a
a la solucion V
, aunque en los nodos lo haga
peor. Conforme la malla se va haciendo mas tupida, V
a
va aproximando cada
vez mejor a V
.
Considerese entonces una serie de mallas cada vez mas nas. Sea h la mayor
anchura del mayor elemento de la malla, y V
+h
y V
ah
las soluciones de ele-
mentos nitos y la solucion igual a V
en los nodos para la malla de anchura
h, respectivamente. Claramente, cuando h tienda a 0, V
ah
tendera, de alguna
forma, a V
, y por tanto
lm
h0
E(V
ah
) = 0 (4.113)
Y como E(V
+h
) E(V
ah
)
lm
h0
E(V
+h
) = 0 (4.114)
Es decir, la soluci on aproximada V
+h
tiende a la solucion V .
10
En ingles strain.
4.9. ELEMENTOS FINITOS Y DIFERENCIAS FINITAS 69
4.9 Elementos nitos y diferencias nitas
Avanzado
_ B asico
El metodo de los elementos nitos se ha impuesto, para un gran n umero de
problemas de resolucion de campos, como el metodo de resolucion por excelencia.
De hecho, en ecuaciones para las que es posible encontrar una forma variacional,
suele ser el metodo mas recomendable. Esto es debido a que permite utilizar
mallas muy irregulares, en geometras con diferentes materiales, sin que esto
suponga esfuerzos adicionales a la hora de establecer el sistema de ecuaciones
algebraico y sin preocuparse por problemas de convergencia. Por contra, en
diferencias nitas, el uso de mallas irregulares y distintos materiales lleva a
ecuaciones en diferencias complicadas, no siendo siempre facil establecer errores
y propiedades de convergencia para las soluciones obtenidas.
Sin embargo, el metodo de diferencias nitas tiene a su favor su mayor gene-
ralidad, ya que parte directamente de la ecuacion diferencial. En cambio, no es
siempre posible encontrar una forma variacional para una ecuacion diferencial
dada.
En terminos generales, los problemas estaticos, en los que no interviene el
tiempo, suelen tener forma variacional. Sin embargo, los problemas dinamicos
en los que se pretende estudiar la evolucion de un cierto campo inicial, no suelen
tenerla. Es en estos problemas donde el metodo de las diferencias nitas tiene
mas predicamento.
Por ultimo, es preciso comentar que existen metodos que combinan ideas
procedentes de ambas tecnicas, as como otros metodos basados en diferentes
principios.
70 ELEMENTOS FINITOS
Captulo 5
Otros problemas estaticos
_ B asico
5.1 Introduccion
El objeto de este captulo es exponer la forma de resolver otros problemas estati-
cos del electromagnetismo. En concreto, se abordara la resolucion por elementos
nitos de los problemas de corrientes estacionarias y de magnestostatica en me-
dios lineales y no lineales.
5.2 Corrientes estacionarias
La ecuacion de continuidad para la corriente reza:
j =
t
(5.1)
En situaciones estacionarias, la densidad de carga permanece constante, y
por tanto
j = 0 (5.2)
La ley de Ohm establece que la corriente es proporcional al campo electri-
co: j = E. Por otra parte, el campo electrico a menudo se puede considerar
irrotacional: E = V . Por tanto, se obtiene la ecuacion:
(V ) = 0 (5.3)
Esta ecuacion es la ecuacion de Laplace que se vio en el captulo anterior,
substituyendo por . Mas a un, tambien las condiciones de contorno son del
mismo tipo. En efecto, un conductor tiene algunos de sus lados a potenciales
conocidos (condiciones de Dirichlet o esenciales) y otros aislados, por los que
no se escapa corriente. Matematicamente esto signica que, en este ultimo caso,
la componente normal de la densidad de corriente es nula: j
n
= 0 o, como
j = V ,
V
n
= 0 (condiciones de von Neumann o naturales).
71
72 CAP
ITULO 5. OTROS PROBLEMAS EST
ATICOS
Si se desea resolver este problema por elementos nitos, podemos escribir
directamente el funcional de optimizacion a partir de los resultados del captulo
anterior:
F =
1
2
___
D
(V )
2
dv
=
1
2
___
D
jE dv (5.4)
Es decir, la distribucion de corrientes que realmente se da es aquella que es
compatible con las condiciones de contorno y que minimiza el calor producido.
5.3 Magnetostatica en medios lineales
Las ecuaciones de campo para campos magnetostaticos son
B = 0 (5.5)
H = j (5.6)
La anulacion de la divergencia de B permite escribir que
B = A (5.7)
En medios lineales, existe una relacion entre B y H del tipo:
B = H (5.8)
donde es una constante que depende del material, pero es independiente del
campo magnetico al que esta sometido.
Es preciso, adem as, especicar las condiciones de contorno. En la mayor
parte de los casos solamente hay que considerar dos tipos de condiciones de
contorno:
El campo B no cruza el contorno, es decir, B
n
= 0, siendo B
n
la compo-
nente normal al contorno.
El campo B cruza perpendicularmente al contorno. Esta condicion se pue-
de escribir B
t
= 0, siendo B
t
las dos componentes de B tangentes al
contorno.
Con las condiciones de contorno que se acaban de prescribir, las ecuaciones
pueden derivarse de un principio variacional, de forma analoga a la ecuacion de
Poisson. En efecto, considerese el problema
5.3. MAGNETOST
ATICA EN MEDIOS LINEALES 73
B = 0
H = j
B = H
sujeto a B
n
= 0 en T
n
B
t
= 0 en T
t
(5.9)
En este problema son datos la densidad de corriente j y las condiciones de
contorno. La solucion puede obtenerse como la solucion del problema:
mn F =
1
2
___
D
HB dv
___
D
jA dv
sujeto a A
t
= 0 en T
n
(5.10)
Notese que el funcional de optimizacion es, de forma analoga al caso elec-
trostatico, la energa del campo menos la energa asociada a las corrientes. Por
otra parte, la condicion de que B sea perpendicular al contorno es una condicion
natural, es decir, no requiere la introduccion de restricciones en el problema de
optimizacion.
B asico
_ Avanzado
La forma de demostrar este resultado es analoga a la que se empleo en el
caso electrostatico. No obstante, ahora hay que emplear el potencial vector A
en vez del potencial escalar V .
Sea entonces A
la solucion de (5.10). Consideremos otras posibles soluciones
A = A
+A (5.11)
Estas posibles soluciones verican la condicion de contorno de (5.10), es decir
A
t
= 0 en T
n
A
t
= 0 en T
n
(5.12)
Notese que esta condicion garantiza que B
n
= 0. En efecto, supongase que
el eje normal al contorno coincide con el eje z. Entonces B
n
= B
z
. Pero
B
z
=
A
y
x
A
x
y
(5.13)
Como las componentes tangenciales son, en este caso, x e y, que son cons-
tantes (iguales a 0) en el contorno (es decir, el plano x y), se sigue que las
derivadas, y por tanto B
z
, se anulan. El caso general, en funcion de las compo-
nentes tangenciales y normales, se sigue de este resultado.
Volviendo al problema variacional, se procede a evaluar F para cualquier A
admisible, es decir
F(A) = F(A
+A) (5.14)
F es la suma de dos terminos
74 CAP
ITULO 5. OTROS PROBLEMAS EST
ATICOS
F =
1
2
___
D
HB dv
___
D
jA dv (5.15)
Se comienza por el primer sumando
1
2
___
D
HB dv =
1
2
___
D
1
B
2
dv =
1
2
___
D
1
(A)
2
dv =
1
2
___
D
1
((A
+A))
2
dv =
1
2
___
D
1
(A
)
2
dv +
___
D
1
(A
) (A) dv+
1
2
___
D
1
(A)
2
dv (5.16)
El segundo sumando puede transformarse aplicando la formula del analisis
vectorial, valida para dos campos a y b cualesquiera:
b(a) = a(b) +(a b) (5.17)
Aplicando esta expresion al segundo sumando de (5.16):
___
D
1
(A
) (A) dv =
___
D
A
_
1
(A
)
_
dv
___
D
_
A
1
(A
)
_
dv =
___
D
AH dv _
__
D
(AH) ds =
___
D
AH dv
__
Dt
(AH) ds (5.18)
El ultimo paso se ha dado porque en T
n
las componentes tangenciales de
A son nulas, por lo que A es paralelo a ds, y por tanto
AH ds = (ds A) H = 0 (5.19)
Por otra parte, se tiene que
___
D
jA dv =
___
D
jA
dv +
___
D
jA dv (5.20)
As pues, se obtiene nalmente
F =
1
2
___
D
1
(A
)
2
dv
___
D
jA
dv +
___
D
AH dv
___
D
jA dv
__
Dt
(AH) ds +
1
2
___
D
1
(A)
2
dv (5.21)
5.4. MAGNETOST
ATICA NO LINEAL 75
Ahora bien, puesto que el mnimo de F se alcanza para A = A
, los terminos
que son lineales en A se han de anular. En efecto, tanto A como A son
funciones admisibles, puesto que verican las condiciones de contorno (5.12).
Pero si los terminos que multiplican A fuesen distintos de cero, tendra signos
distintos para A y A. Escogiendo el signo negativo, se tendra un F que
sera menor que el F en A
, lo que contradice que el mnimo de F se alcance
en A
1
. As pues se ha de vericar:
___
D
AH dv
___
D
jA dv = 0
__
Dt
(AH) ds = 0 (5.22)
Estas ecuaciones se han de cumplir para cualquier A que cumpla las con-
diciones de contorno (5.12). La primera ecuacion implica que
H = j (5.23)
como se puede ver tomando funciones A que sean no nulas en peque nos do-
minios interiores a T. Por otra parte, la segunda ecuacion se puede escribir
como
__
Dt
(Hds) A = 0 (5.24)
En T
t
, A puede, en principio, valer cualquier cosa. Por tanto, la unica
forma de que se anule la integral es que Hds = 0, o lo que es lo mismo, que
H no tenga mas componente que la normal al contorno.
Es importante notar que el problema variacional (5.10) esta escrita de forma
vectorial. As pues, es posible ahora escoger las coordenadas que mas convengan
para resolver el problema.
En casos en dos dimensiones (por ejemplo, cuando se estudian congura-
ciones muy largas o con simetra cilndrica) se ha de utilizar un potencial A
que tenga tan solo una componente no nula. En este caso, la similaridad con la
ecuacion de Poisson es particularmente marcada.
En cualquier caso, la resolucion del problema por elementos nitos se plantea
de la misma forma que en el captulo anterior. Las tres componentes de A
se escriben como una suma nitas de las funciones de forma estudiadas en el
captulo anterior, y se calculan la matriz analoga a la matriz de rigidez K y
el vector analogo al vector de fuerzas b, resolviendo posteriormente el sistema
lineal resultante.
76 CAP
ITULO 5. OTROS PROBLEMAS EST
ATICOS
5.4 Magnetostatica no lineal
Avanzado
_ B asico
5.4.1 Planteamiento de la forma variacional
Practicamente la totalidad de los aparatos que utilizan campos magneticos tie-
nen partes de hierro. El hierro es empleado porque amplica enormemente el
campo magnetico. Sin embargo, desde el punto de vista analtico, complica
grandemente el problema debido a la existencia de fenomenos de histeresis y
saturacion.
Muy a menudo, los efectos de la histeresis pueden despreciarse. En efecto,
son muchos los aparatos que utilizan hierros con ciclos muy estrechos, a n de
minimizar perdidas. Incluso en casos en que la histeresis no sea despreciable,
esta aproximacion da una primera solucion util.
En este caso, existe una dependencia funcional entre B y H. En efecto, puede
escribirse que
B = B(H) (5.25)
donde B(H) es una funcion no lineal de H que tiende a saturarse, es decir, que
verica
lm
H
B(H)
H
=
0
(5.26)
mientras que, muy a menudo,
B(H)
H
[
H=0
tiene un valor mucho mas alto (por
ejemplo, 1500
0
).
La presencia de histeresis hara imposible determinar esta relacion funcional,
ya que a cada valor de H le correspondera mas de uno de B.
Puede vericarse que B(0) ,= 0. Los materiales con esta caracterstica son
imanes permanentes, que crean campo en ausencia de corriente.
En lo que sigue, se supondra que la dependencia funcional entre B y H puede
describirse mediante una relacion del tipo:
H = H
0
+
B(H)
B
B (5.27)
El termino H
0
es la fuerza coercitiva, que existe tan solo en imanes per-
manentes, y resulta de la imanacion permanente del iman. El segundo termino
expresa que, en la parte del campo no atribuible a la imanacion permanente
(toda, salvo en imanes permanentes), los campos H y B son paralelos.
Esta relacion es falsa si a un iman se le aplica un campo externo muy intenso,
ya que en este caso B y H acabaran siendo paralelos. Sin embargo, es aplicable
a la mayor parte de los casos de interes, en los que en el interior del iman el
primer termino suele ser claramente mayor que el segundo.
Es fundamental entonces el hecho de que las ecuaciones de campo:
1
Los terminos cuadraticos en A pueden despreciarse eligiendo A lo bastante peque no.
5.4. MAGNETOST
ATICA NO LINEAL 77
B = 0
H = j
B = B(H)
sujeto a B
n
= 0 en T
n
B
t
= 0 en T
t
(5.28)
son equivalentes al problema variacional:
mn F =
___
D
_
_
B
0
H dB
_
dv
___
D
jA; dv
sujeto a A
t
= 0 en T
n
(5.29)
El funcional es identico al del problema lineal, salvo por el termino cuadratico
en el campo. De hecho, la integral
_
B
0
H dB (5.30)
ha de interpretarse a partir de la substitucion de (5.27):
_
B
0
H dB = H
0
B+
_
B
0
H(B) dB (5.31)
Notese que en el caso lineal H =
1
B, H
0
= 0, y por tanto
_
B
0
H(B) dB =
_
B
0
1
B dB =
1
2
B
2
=
1
2
BH =
1
2
BH (5.32)
con lo que el funcional se reduce al del apartado anterior.
B asico
_ Avanzado
La demostracion de la igualdad entre las formas fuerte (5.28) y debil (5.29)
de las ecuaciones de campo se demuestra de una manera muy similar a la del
caso lineal. Sea as A
y B
la solucion del problema (5.29), y se consideran
perturbaciones A, y por tanto B = A al mismo, que cumplan las
condiciones de contorno esenciales del problema (5.29). Naturalmente, se ha de
cumplir que
F(A
) F(A
+A) A (5.33)
Ahora bien, se tiene que;
F(A
+A) F(A
) =
___
D
_
_
B
+B
0
H dB
_
dv
___
D
j (A
+A) dv
78 CAP
ITULO 5. OTROS PROBLEMAS EST
ATICOS
___
D
_
_
B
0
H dB
_
dv
___
D
jA
dv =
___
D
_
_
B
+B
B
H dB
_
dv
___
D
jA dv =
___
D
HB dv
___
D
jA dv (5.34)
donde el ultimo paso se ha podido dar debido a la suposicion de que B es
peque no. Entonces
F(A
+A) F(A
) =
___
D
HA dv
___
D
jA dv (5.35)
Aplicando las formulas (5.17):
F(A
+A) F(A
) =
___
D
HA dv
___
D
jA dv =
___
D
AH dv
___
D
(HA) dv
___
D
jA dv =
___
D
AH dv _
__
D
HA dv
___
D
jA dv (5.36)
Esta expresion coincide con la que se obtena en el caso lineal (ver ecuacion
(5.18)). A partir de este punto, el resto del analisis es identico: la anulacion de
los terminos lineales en A (que son los unicos que existen cuando A es lo
bastante peque no), exigida por la condicion de que F(A
) es mnimo, lleva a
las ecuaciones (5.28).
5.4.2 Resolucion numerica de la forma variacional
Volviendo de nuevo a las ecuaciones (5.29), que se vuelven a reproducir a con-
tinuacion:
mn F =
___
D
_
_
B
0
H dB
_
dv
___
D
jA dv
sujeto a A
t
= 0 en T
n
(5.37)
es preciso establecer un proceso numerico para su resolucion. De forma analoga a
como se haca en el captulo, o en la seccion, anteriores se desarrolla el potencial
vector en una suma nita de funciones conocidas:
5.4. MAGNETOST
ATICA NO LINEAL 79
A
k
= A
k0
+
N
i=1
a
ki
A
ki
(5.38)
donde k = x, y, z, o k = r, , , u otras posibilidades seg un el sistema de coor-
denadas utilizado. Las funciones A
ki
son funciones conocidas, y las incognitas
son los coecientes a
ki
. Por lo tanto
F(A) F(a
ki
) (5.39)
Encontrar el mnimo de F es resolver el sistema de ecuaciones
F
a
ki
= 0 a
ki
(5.40)
En el caso lineal (la ecuacion de Poisson o las ecuaciones de la magnetostatica
lineal), el funcional F es una una funcion cuadratica de los coecientes a
ki
. Por
lo tanto, la ecuacion anterior es una ecuacion lineal, cuya resolucion ya se ha
abordado.
En el caso no lineal, el funcional F no es una funcion cuadratica de los a
ki
.
En efecto, en el termino
___
D
_
_
B
0
H dB
_
dv (5.41)
B es una funcion lineal de a
ki
, puesto que B depende linealmente de A (B =
A) y A depende linealmente de a
ki
; pero H no es funcion lineal de a
ki
, ya
que la funcion H(B) no es lineal en este caso. Por tanto, la ecuacion (5.40) no
es lineal.
Existen varios metodos para resolver problemas no lineales. En los programas
de elementos nitos el mas utilizado es el metodo de Newton-Raphson. Este
metodo, para resolver el sistema de ecuaciones
f (x) = 0 (5.42)
plantea la iteracion
x
l+1
= x
l
_
f
x
_
1
f (x
l
) (5.43)
donde x
l
es la estimacion de la solucion en la iteracion l-esima.
Supongase entonces que, para simplicar la notacion
2
, existe una sola com-
ponente del potencial A, como sucede, por ejemplo, en problemas cartesianos
de 2 dimensiones o en problemas con simetra cilndrica. Entonces
A = A
0
k +
N
i=1
a
i
A
i
k (5.44)
2
Aunque el caso general se trata de la misma manera.
80 CAP
ITULO 5. OTROS PROBLEMAS EST
ATICOS
para el caso cartesiano con el campo B con solamente componentes x e y. k es
el vector unitario en la direccion z. En el caso de simetra cilndrica habra que
substituir k por u
. Aplicando el algoritmo de Newton-Raphson a la ecuacion
(5.40) se obtiene que
a
l+1
i
= a
l
i
j
_
2
F
a
i
a
j
_
1
_
F
a
j
_
[
ai=a
l
i
(5.45)
As pues, es preciso evaluar la matriz
K
ij
=
2
F
a
i
a
j
(5.46)
y el vector
b
j
=
F
a
j
(5.47)
El calculo de estas cantidades se realiza de una manera muy similar a la
vista en el captulo anterior. Por ejemplo, para calcular la matriz K
ij
es preciso
calcular dos terminos:
K
ij
=
2
a
i
a
j
_
___
D
_
_
B
0
H(a
l
) dB
_
dv
___
D
j
_
A
0
+
N
i=1
a
i
A
i
_
; dv
_
=
2
a
i
a
j
_
___
D
_
_
B
0
H(a
l
) dB
_
dv
_
(5.48)
La derivada segunda se puede hacer en dos pasos. Se calculara primero la
derivada primera
ai
. Sea
F
B
=
___
D
_
_
B
0
H(a
l
) dB
_
dv (5.49)
Entonces, por la denicion de derivada, si se considera un incremento pe-
que no de las cantidades a
i
, el incremento de F
B
se calculara por la formula:
F
B
=
i
F
B
a
i
a
i
(5.50)
Notese que a
i
A
i
es simplemente A. Comparando con (5.36)
___
D
AH dv _
__
D
HA =
___
D
AH dv =
___
D
a
i
A
i
kH dv =
i
F
B
a
i
a
i
(5.51)
5.4. MAGNETOST
ATICA NO LINEAL 81
El paso de la primera a la segunda lnea se ha podido dar porque las pertur-
baciones consideradas A tienen condiciones de contorno nulas (recuerdese que
A
0
lleva toda la informacion sobre las condiciones de contorno). Como los a
i
son arbitrarios, se sigue que
F
B
a
i
=
___
D
A
i
kH dv (5.52)
As pues, la segunda derivada se calcula como
2
F
B
a
i
a
j
=
___
D
A
i
k
H
a
j
dv (5.53)
Pero, escribiendo
H = H
0
+
H(B)
B
B (5.54)
se obtiene
H
a
j
= (5.55)
a
j
_
H(B)
B
B
_
= (5.56)
B
a
j
_
H(B)
B
_
+
H(B)
B
B
a
j
= (5.57)
B
B
a
j
B
_
H(B)
B
_
+
H(B)
B
B
a
j
(5.58)
Ahora, como B = A = (A
0
+
i
a
i
A
i
)k, las derivadas de B y de
B con respecto a a
i
son faciles de evaluar. Conociendo B (es decir, el B
l
que
resultare de la estimacion l en el algoritmo de Newton-Raphson), tambien se
puede calcular
B
_
H(B)
B
_
. Por lo tanto, la expresion anterior es calculable.
Supongase ademas que las A
i
son funciones piramidales como las del captulo
anterior. Es entonces facil de comprobar que
H
aj
es distinto de cero solamente
en los elementos que se juntan en el vertice j. Por tanto, la matriz K
ij
, que se
calcula mediante la formula (5.53), solamente tendra elementos no nulos si i y
j son vertices vecinos, o el mismo vertice. Es decir, sera tan cuasivaca como la
de la ecuacion de Poisson. Esto es muy importante, puesto que en el algoritmo
de Newton-Raphson hace falta invertir esta matriz.
El calculo del vector
b, mas sencillo, se deja al lector interesado.
82 CAP
ITULO 5. OTROS PROBLEMAS EST
ATICOS
Captulo 6
La ecuacion de difusion
_ B asico
6.1 Introduccion
La ecuacion de difusion es una de las mas sencillas ecuaciones de sistemas que
evolucionan en el tiempo. Esta ecuacion es:
u
t
= (u)
sujeto a u T [0, T]
u(x, 0) = f(x)
u(x, t) = g(x, t) x T
1
u(x,t)
n
= h(x, t) x T
2
(6.1)
Es decir, la ecuacion de difusion iguala la laplaciana de una determinada
funcion en un cierto dominio a la derivada parcial de dicha funcion respecto al
tiempo. Como en el caso de la ecuacion de Poisson, existen tambien condiciones
de contorno de Dirichlet y Neumann, que en este caso pueden tambien depender
del tiempo. Ademas, se da el valor de la funcion para el instante inicial t = 0.
El problema es calcular la funcion u(x, t) para todos los instantes hasta un
determinado tiempo maximo T.
Se puede apreciar que esta es una ecuacion aparentemente muy similar a la
de Poisson. Sin embargo, sus propiedades y comportamiento son completamente
diferentes, y los metodos de resolucion numerica, aunque aparentemente simila-
res, tienen tambien propiedades muy diferentes a los estudiados hasta ahora.
En este captulo se estudiara con especial atencion la ecuacion de difusion
con una sola dimension espacial. Esta ecuacion ya presenta la mayor parte de
los nuevos problemas y fenomenos. Mas adelante, se estudiara su generalizacion
a varias dimensiones.
83
84 CAP
ITULO 6. LA ECUACI
ON DE DIFUSI
ON
6.2 La ecuacion de difusion en 1 dimension
En 1 dimension, la ecuacion de difusion se reduce a
u
t
=
x
_
u
x
_
(6.2)
mas las condiciones de contorno. El dominio T es ahora un intervalo, que se
puede tomar de la forma T = [0, L]. La constante puede en principio depender
de la posicion. En esta seccion se considerara el caso en que sea constante.
Por tanto, la ecuacion anterior se reduce a
u
t
=
2
u
x
2
(6.3)
Esta ecuacion puede ser simplicada a un mas deniendo las nuevas variables
x =
x
L
(6.4)
t =
t
L
2
(6.5)
Si se hace esta substitucion se obtiene que (6.3) se transforma en:
u
t
=
2
u
x
2
x [0, 1] (6.6)
Por lo tanto, se estudiara, sin perdida de generalidad, la ecuacion (6.6) (aun-
que se omitira la tilde sobre las variable). El procedimiento que se ha aplicado es
conocido como normalizacion, y es conveniente llevarlo a cabo, a un en los casos
en que no se simplique la ecuacion, para que el ordenador maneje n umeros en
torno a la unidad.
Considerense ahora las condiciones de contorno. Tras la normalizacion, el
contorno de T son los puntos 0 y 1. Por tanto, las condiciones de contorno seran
el valor u(0) o el valor
u
x
[
x=0
para el punto x = 0, y similarmente para x = 1.
Para concretar, supongase que se impone una condicion de Dirichlet en x = 0
y una de Neumann en x = 1. Entonces, el problema es
u
t
=
2
u
x
2
sujeto a u(x, t) [0, 1] [0, T]
u(0, t) = g(t)
u(x,t)
x
[
x=1
= h(t)
u(x, 0) = f(x) (6.7)
Para resolver numericamente el problema, el primer paso es discretizar el
espacio. As pues, en vez de considerar los valores de u para todos los puntos de
6.2. LA ECUACI
ON DE DIFUSI
ON EN 1 DIMENSI
ON 85
1 2 3 4 N-1 N
Figura 6.1: Malla unidimensional.
x, se va a considerar en los puntos de una malla de anchura h, tal como muestra
la gura 6.1.
En los puntos internos de la malla, la laplaciana se puede aproximar por
diferencias nitas:
u
i
t
=
2
u
x
2
[
x=xi
u
i+1
+u
i1
2u
i
h
2
(6.8)
Cada u
i
es, naturalmente, una funcion del tiempo. La condicion de contorno
de Dirichlet es
u
0
(t) = g(t) (6.9)
La condicion de contorno de Neumann se puede aproximar introduciendo un
nodo auxiliar imaginario en x = 1 +
1
h
. Este sera el nodo N +1. Entonces, en el
ultimo nodo N se aproxima la laplaciana mediante
u
N
t
=
2
u
x
2
[
x=1
u
N+1
+u
N1
2u
N
h
2
(6.10)
Por otra parte, se tiene que la condicion de Neumann
u
x
[
x=1
= h(t)
u
N+1
u
N1
2h
(6.11)
Luego
u
N+1
= u
N1
+ 2hh(t) (6.12)
Substituyendo esta expresion en (6.10)
u
N
t
=
2
u
x
2
[
x=1
2u
N1
2u
N
h
2
+
2h(t)
h
(6.13)
Las ecuaciones (6.8,6.9,6.13) pueden combinarse en el sistema
86 CAP
ITULO 6. LA ECUACI
ON DE DIFUSI
ON
d
dt
_
_
u
1
u
2
u
3
.
.
.
u
N1
u
N
_
_
=
1
h
2
_
_
2 1 0 . . . 0 0
1 2 1 . . . 0 0
0 1 2 . . . 0 0
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 . . . 2 1
0 0 0 . . . 2 2
_
_
_
_
u
1
u
2
u
3
.
.
.
u
N1
u
N
_
_
+
_
_
g(t)
h
2
0
0
.
.
.
0
2h(t)
h
_
_
(6.14)
En forma compacta
d
dt
u(t) = Au(t) +b(t) (6.15)
6.3 Resolucion de las ecuaciones
En general, la ecuacion de difusion lleva a ecuaciones diferenciales lineales de
la forma anterior, donde la matriz A es la discretizacion de la ecuacion de
Laplace en el dominio considerado y el vector b contiene informacion sobre
las condiciones de contorno. La solucion se puede obtener de la expresion:
u(t
2
) = exp [A(t
2
t
1
)] u(t
1
) +
_
t2
t1
exp [A(t
2
s)] b(s) ds (6.16)
donde el exponencial de una matriz se dene por la serie
exp [A] = I +A +
1
2!
A
2
2
+
1
3!
A
3
3
+. . . (6.17)
Se puede comprobar que (6.16) es la solucion mediante su substitucion di-
recta en (6.15), substituyendo las exponenciales por sus series denitorias.
En principio, la ecuacion (6.16) permite la resolucion directa del problema,
sin mas que hacer t
1
= 0 y substituir t
2
por el tiempo (o tiempos) para el cual se
desea la solucion. Sin embargo, el calculo del exponencial de una matriz grande
(que surgen si el mallado del espacio es estrecho) es una tarea numericamente
compleja.
La solucion es mallar tambien el tiempo, de forma que se eval ua la solucion
en los instantes t
j
= j l, siendo l el intervalo temporal. Si l es lo bastante
peque no, puede sustituirse la exponencial por una aproximacion de calculo mas
sencillo. Esto permite obtener una formula sencilla para pasar del instante t
j
al
t
j+1
. Algunas posibilidades son:
Metodo explcito clasico
exp [Al] I +Al (6.18)
6.3. RESOLUCI
ON DE LAS ECUACIONES 87
Metodo implcito clasico
exp [Al] (I Al)
1
(6.19)
Metodo de Crank-Nicholson
exp [Al]
I +
1
2
Al
I
1
2
Al
(6.20)
Se analizan ahora estas posibilidades.
6.3.1 Metodo explcito clasico
La aproximacion empleada (6.18) resulta de cortar la serie denitoria de la
exponencial (6.17) a partir del segundo termino. Por tanto, aproximara bien la
exponencial si l es lo bastante peque no. Aplicando la formula (6.16) entre los
instantes t
j
y t
j+1
, y utilizando la aproximacion (6.18)
u
j+1
= exp [A(t
j+1
t
j
)] u
j
+
_
tj+1
tj
exp [A(t
j+1
s)] b(s) ds
= exp [Al] u
j
+
_
tj+1
tj
exp [A(t
j+1
s)] b(s) ds
[I +Al] u
j
+
_
l
0
[I +As] ds
b
j+1
+b
j
2
[I +Al] u
j
+
_
l +A
l
2
2
_
b
j+1
+b
j
2
[I +Al] u
j
+c
j
(6.21)
La gran ventaja de este metodo es que permite calcular la solucion u
j+1
a partir de la solucion u
j
sin hacer nada mas que unas multiplicaciones. En
este sentido, podra parecer que presenta una carga computacional baja. Sin
embargo, se vera que esto es mas apariencia que realidad, ya que se requiere un
l muy peque no para que el metodo funcione bien.
Antes de estudiarlo, es conveniente mirar con mas atencion la estructura de
la ecuacion (6.21). Por ejemplo, para el caso monodimensional, la actualizacion
del valor de u en la posicion espacial i interior al dominio es
u
i,j+1
= u
i,j
+
1
h
2
(u
i+1,j
2u
i,j
+u
i1,j
) l (6.22)
No aparece ning un termino proveniente de c
j
porque este vector tiene compo-
nentes nulas para los nodos interiores. En efecto, b solamente tiene componentes
no nulas en los nodos de frontera, y c, que resulta de una composicion de b y
Ab, solamente puede tenerlos en los nodos de frontera y en sus vecinos.
La ecuacion anterior se puede reescribir como
88 CAP
ITULO 6. LA ECUACI
ON DE DIFUSI
ON
u
i,j+1
u
i,j
l
=
1
h
2
(u
i+1,j
2u
i,j
+u
i1,j
) (6.23)
Comparando con la ecuacion de difusion
u
t
=
2
u
x
2
, se comprueba que se ha
discretizado la ecuacion mediante las aproximaciones
u
t
[
i,j
=
u
i,j+1
u
i,j
l
(6.24)
2
u
x
2
[
i,j
=
1
h
2
(u
i+1,j
2u
i,j
+u
i1,j
) (6.25)
La aproximacion de las derivadas respecto al espacio es la misma que se
utilizo al estudiar la ecuacion de Poisson, y se puede justicar de la misma
forma. En cambio, la aproximacion de la derivada respecto al tiempo es una
diferencia retrasada, ya que estima el valor de la derivada a partir del valor de
la funcion en un instante posterior.
6.3.2 Metodo implcito clasico
La aproximacion de la exponencial utilizada en este metodo puede desarrollarse
en serie
(I Al)
1
= I +Al +A
2
l
2
+A
3
l
3
+. . . (6.26)
en el supuesto de que la serie del lado derecho converja. La formula puede
demostrarse, en este caso, sin mas que multiplicar la serie por I Al. Se puede
comprobar que la convergencia se produce si l es lo bastante peque no
1
.
Comparando esta expresion con la serie que dene la exponencial se puede
apreciar que en este caso se comete un error principal por exceso de
1
2
A
2
l
2
,
comparado con el error por defecto de la misma cantidad que se tena en el
metodo explcito.
Utilizando esta aproximacion, se obtiene que
u
j+1
= exp [A(t
j+1
t
j
)] u
j
+
_
tj+1
tj
exp [A(t
j+1
s)] b(s) ds
= exp [Al] u
j
+
_
tj+1
tj
exp [A(t
j+1
s)] b(s) ds
[I Al]
1
u
j
+
_
l
0
[I As]
1
ds
b
j+1
+b
j
2
[I Al]
1
u
j
+
_
l
0
[I +As] ds
b
j+1
+b
j
2
1
Especcamente, debe ser lo bastante peque no como para que todos los autovalores de Al
tengan un modulo inferior a 1.
6.3. RESOLUCI
ON DE LAS ECUACIONES 89
[I Al]
1
u
j
+
_
Il +A
l
2
2
_
b
j+1
+b
j
2
[I Al]
1
u
j
+c
j
(6.27)
El metodo parece mas trabajoso que el metodo implcito, puesto que hay que
se observa la inversa de una matriz. La manera eciente de tratar este problema
es reescribir la ecuacion como
[I Al] u
j+1
= u
j
+ [I Al] c
j
(6.28)
y resolver el sistema lineal para calcular u
j+1
a partir de los valores conocidos
de u
j
y c
j
. Como la matriz que aparece es siempre la misma en todos los pasos
del problema, de j = 1 hasta el ultimo, lo mas ecaz es calcular al principio del
algoritmo la factorizacion LU de I Al, y utilizarla en adelante. Esta factoriza-
cion inicial es la mayor diferencia, en terminos de coste computacional, entre el
metodo explcito y el implcito. Sin embargo, a menudo queda compensada por
el hecho de que en el metodo implcito se puede utilizar pasos l mucho mayores
que en el explcito, por razones que se veran mas adelante.
La ecuacion (6.28) se puede escribir, para nodos del interior, como
u
i,j+1
1
h
2
(u
i+1,j+1
2u
i,j+1
+u
i1,j+1
) l = u
i,j
(6.29)
Reordenando terminos
u
i,j+1
u
i,j
l
=
1
h
2
(u
i+1,j+1
2u
i,j+1
+u
i1,j+1
) (6.30)
Comparando con la ecuacion diferencial, se comprueba que se han realizado
las aproximaciones
u
t
[
i,j+1
=
u
i,j+1
u
i,j
l
(6.31)
2
u
x
2
[
i,j+1
=
1
h
2
(u
i+1,j+1
2u
i,j+1
+u
i1,j+1
) (6.32)
Es decir, se estan utilizando derivadas temporales adelantadas, en compara-
cion con las retrasadas utilizadas en el metodo explcito.
6.3.3 Metodo de Crank-Nicholson
En este caso, la exponencial queda aproximada mediante la matriz
_
I
1
2
Al
_
1
_
I +
1
2
Al
_
(6.33)
Desarrollando en serie la matriz inversa, se obtiene
90 CAP
ITULO 6. LA ECUACI
ON DE DIFUSI
ON
_
I
1
2
Al
_
1
_
I +
1
2
Al
_
=
_
I +
1
2
Al +
1
4
A
2
l
2
+
1
8
A
3
l
3
+. . .
__
I +
1
2
Al
_
=
I +Al +
1
2
A
2
l
2
+
1
4
A
3
l
3
+. . . (6.34)
Comparando con la serie que dene la exponencial, se observa que el error
principal es de
1
12
A
3
l
3
. Es un termino de orden c ubico, en vez de cuadratico
como en los casos anteriores, por lo que, en principio, el metodo debiera ser mas
exacto.
Procediendo como en los casos anteriores, se encuentra que
u
j+1
= exp [A(t
j+1
t
j
)] u
j
+
_
tj+1
tj
exp [A(t
j+1
s)] b(s) ds
= exp [Al] u
j
+
_
tj+1
tj
exp [A(t
j+1
s)] b(s) ds
_
I
1
2
Al
_
1
_
I +
1
2
Al
_
u
j
+
_
l
0
_
I
1
2
As
_
1
_
I +
1
2
As
_
ds
b
j+1
+b
j
2
_
I
1
2
Al
_
1
_
I +
1
2
Al
_
u
j
+
_
l
0
_
I +As +
1
2
As
2
_
ds
b
j+1
+b
j
2
_
I
1
2
Al
_
1
_
I +
1
2
Al
_
u
j
+
_
l +
1
2
Al
2
+
1
6
Al
3
_
b
j+1
+b
j
2
_
I
1
2
Al
_
1
_
I +
1
2
Al
_
u
j
+c
j
(6.35)
Como en el anterior metodo implcito, aparece la inversa de una matriz. Este
problema se trata de forma semejante, calculado la factorizacion LU de I
1
2
Al
al principio del procedimiento.
La ecuacion anterior se puede escribir tambien como
_
I
1
2
Al
_
u
j+1
=
_
I +
1
2
Al
_
u
j
+c
j
(6.36)
Para puntos del interior, esto es lo mismo que
6.4. ESTABILIDAD DE LA SOLUCI
ON 91
u
i,j+1
1
h
2
(u
i+1,j+1
2u
i,j+1
+u
i1,j+1
) l =
u
i,j
+
1
h
2
(u
i+1,j
2u
i,j
+u
i1,j
) l (6.37)
Reordenando terminos
u
i,j+1
u
i,j
l
=
1
2
_
1
h
2
(u
i+1,j+1
2u
i,j+1
+u
i1,j+1
) +
1
h
2
(u
i+1,j
2u
i,j
+u
i1,j
)
_
(6.38)
Se puede considerar que se han hecho las aproximaciones
u
t
[
i,j+
1
2
=
u
i,j+1
u
i,j
l
(6.39)
2
u
x
2
[
i,j+
1
2
=
1
2
_
1
h
2
(u
i+1,j+1
2u
i,j+1
+u
i1,j+1
) +
1
h
2
(u
i+1,j
2u
i,j
+u
i1,j
)
_
(6.40)
Es decir, se han empleado diferencias centradas para aproximar las derivadas,
tanto en el tiempo como en el espacio.
6.4 Estabilidad de la solucion
Todos los metodos expuestos se pueden escribir como
u
j+1
= Gu
j
+c
j
(6.41)
La matriz G depende del metodo escogido, siendo I + Al para el metodo
explcito, (I Al)
1
para el implcito clasico y (I
1
2
Al)
1
(I + Al) para el
Crank-Nicholson. Esta ecuacion se resuelve empezando desde j = 0 y calculando
para valores sucesivos de j.
Esta ecuacion sera in util si no es robusta frente a los errores. En efecto, es
inevitable que se introduzcan errores al resolver la ecuacion, aunque solamente
sea debido a errores de redondeo. Los errores producidos en el paso j causan
errores en el (se propagan al) paso j + 1, y de all a los pasos sucesivos. Si
estos errores propagados no disminuyen, sino que crecen conforme avanza el
algoritmo, la solucion que se obtenga sera de escasa utilidad.
Un algoritmo que tenga la propiedad de hacer que el efecto de los errores
disminuya al avanzar la solucion se llama estable.
Supongamos entonces que en el instante j la solucion obtenida u
j
tiene un
error e
j
. O sea,
92 CAP
ITULO 6. LA ECUACI
ON DE DIFUSI
ON
u
j
= u
j
+e
j
(6.42)
Si se aplica el algoritmo (6.41) se obtiene, suponiendo que no haya errores
adicionales que
u
j+1
= u
j+1
+e
j+1
= G u
j
= Gu
j
+Ge
j
+c
j
(6.43)
Comparando con la ecuacion original (6.41) se obtiene la ecuacion del error
e
j+1
= Ge
j
(6.44)
Es decir, la ecuacion del error es la misma que la de la solucion, salvo que
desaparece el termino independiente.
En general se tiene que
e
j+k
= G
k
e
j
(6.45)
As pues, si el error se ha de anular cuando k , se debe vericar que
lm
k
G
k
0 (6.46)
Esta ecuacion se cumple si todos los autovalores de G tienen modulo menor
que 1. Por otra parte, los autovalores de G son funcion de los autovalores de A,
ya que G es funcion de A. Los autovalores de A son las soluciones de la ecuacion
Av
i
=
A
i
v
i
(6.47)
Para el metodo explcito clasico, G = I +Al
Gv
i
= (I +Al) v
i
=
_
1 +
A
i
_
v
i
(6.48)
As pues, los autovalores de G para este caso son
EC
i
= 1 +
A
i
l (6.49)
Analogamente, se encuentra para el metodo implcito clasico
IC
i
=
1
1
A
i
l
(6.50)
Para el de Crank-Nicholson
CN
i
=
1 +
1
2
A
i
l
1
1
2
A
i
l
(6.51)
Se puede demostrar que los autovalores de A estan, para el caso monodi-
mensional, entre 0 y
4
h
2
.
As pues, la condicion de que el modulo de los autovalores de G sea menor
que 1 es
6.4. ESTABILIDAD DE LA SOLUCI
ON 93
Metodo explcito clasico:
l
h
2
<
1
2
Metodo implcito clasico: vale cualquier l y h. Se dice que el metodo es
incondicionalmente estable.
Metodo de Crank-Nicholson: es la misma situacion que antes. El metodo
es incondicionalmente estable.
Se observa que en el metodo explcito el uso de mallas espaciales peque nas
(h peque nas) obliga al uso de pasos temporales muy cortos (h
2
extremadamente
peque nas). Es por esto por lo que este metodo no es muy usado, a pesar de su
sencillez.
B asico
_ Avanzado
La demostracion anterior, aunque muy general, no es quiza muy transpa-
rente. Para analizar con mas precision la situacion puede utilizarse el llamado
metodo de Neumann.
Este metodo parte de imponer un error de estructura particular. En concreto
e
i,0
(k) = sin (ki) (6.52)
o
f
i,0
(k) = cos (ki) (6.53)
La constante k es un n umero real. Si todos los senos y cosenos denidos de
esta manera dan lugar a un error que decrece, tambien decrecera un error inicial
arbitrario. En efecto, un error arbitrario se puede escribir como suma de senos
y cosenos.
Para analizar la estabilidad del metodo explcito se escribe la ecuacion aso-
ciada al i-esimo nodo:
e
i,j+1
(k) = e
i,j
(k) +
1
h
2
(e
i+1,j
(k) 2e
i,j
(k) +e
i1,j
(k)) l (6.54)
Analogamente se tiene
f
i,j+1
(k) = f
i,j
(k) +
1
h
2
(f
i+1,j
(k) 2f
i,j
(k) +f
i1,j
(k)) l (6.55)
El smbolo denota la unidad imaginaria. Sea entonces
g
i,j
(k) = f
i,j
(k) +e
i,j
(k) (6.56)
Entonces,
g
i,j+1
(k) = g
i,j
(k) +
1
h
2
(g
i+1,j
(k) 2g
i,j
(k) +g
i1,j
(k)) l (6.57)
Por otra parte
94 CAP
ITULO 6. LA ECUACI
ON DE DIFUSI
ON
g
i,0
(k) = f
i,0
(k) +e
i,0
(k)
= cos (ki) + sin (ki)
= exp (ki)
Por otra parte, aplicando (6.57)
g
i,1
(k) = g
i,0
(k) +
1
h
2
(g
i+1,0
(k) 2g
i,0
(k) +g
i1,0
(k)) l
= exp (ki) +
1
h
2
(exp (k(i + 1)) 2 exp (ki) + exp (k(i 1))) l
= exp (ki)
_
1 +
l
h
2
exp (k)
2l
h
2
+
l
h
2
exp (k)
_
= exp (ki)
_
1
2l
h
2
+
2l
h
2
cos (k)
_
= exp (ki) G(k)
= G(k)g
i,0
(6.58)
As pues, los senos y cosenos con un k dados resultan multiplicados por el
factor (real) G(k). Si los errores van a disminuir, se requiere que [ G(k) [< 1. El
k mas desfavorable es aquel para el que cos (k) = 1. En este caso
G(k) = 1
4l
h
2
> 1
l
h
2
<
1
2
(6.59)
que coincide con la condicion deducida anteriormente.
Incidentalmente, el calculo demuestra que los errores que crecen mas rapido
son los senos y cosenos con ks para los cuales cos (k) = 1. Estas funciones
cambian signo de un nodo i al vecino (i + 1 o i 1). La gura 6.2 muestra
la evolucion del algoritmo para pasos temporales por encima y por debajo del
valor crtico.
En concreto, se simulo el caso monodimensional con 10 nodos y h = 1. El
contorno de la izquierda era de Dirichlet, con potencial nulo; y el de derecha de
Neumann, con derivada nula. La simulacion estable, mostrada a la izquierda,
se hizo con un paso temporal l = 0,4. La de la derecha, inestable, con l = 0,6.
Se observa, en el caso inestable, como crecen los errores del tipo indicado en el
parrafo anterior.
Los algoritmos implcito clasico y de Crank-Nicholson se analizan de forma
similar.
6.5 Convergencia de los algoritmos
En las secciones precedentes se ha analizado de que manera es posible discretizar
la ecuacion diferencial de forma que sea resoluble en un ordenador. Es de esperar
6.5. CONVERGENCIA DE LOS ALGORITMOS 95
0 5 10
0
2
4
6
8
10
12
14
0 5 10
0
2
4
6
8
10
12
14
Figura 6.2: Algoritmo estable e inestable
que conforme se disminuya la anchura de la malla h y el paso temporal de
integracion l se vayan obteniendo soluciones que aproximen cada vez mejor la
de la ecuacion diferencial.
Ademas de los algoritmos expuestos arribas, existen muchos mas que pre-
sentan sus propias ventajas e inconvenientes, y que muy a menudo se presentan
como una ecuacion en diferencias sobre la malla. Un requerimiento para que
la solucion aproximada converja a la exacta es que el algoritmo sea estable.
Es natural, ademas, exigir que sea consistente, es decir, que aproxime la ecua-
cion diferencial correcta cuando se reduce la malla. Un ejemplo aclarara este
concepto.
Para aproximar la ecuacion de difusion
u
t
2
u
x
2
= 0 (6.60)
se propone la ecuacion en diferencias
u
i,j+1
u
i,j1
2l
u
i+1,j
2 [u
i,j+1
+ (1 )u
i,j1
] +u
i1,j
h
2
= 0 (6.61)
con 0 < < 1. En esta aproximacion, el primer termino puede interpretarse
como una aproximacion a la derivada respecto al tiempo, y el segundo como una
a la segunda derivada respecto al espacio, en el punto (i, j). En efecto, ambos
terminos tienden a la derivada que aproximan cuando l o h, respectivamente,
tiende a cero.
96 CAP
ITULO 6. LA ECUACI
ON DE DIFUSI
ON
Es facil comprobar, de hecho, que para una funcion arbitraria u(x, t)
u
i,j+1
u
i,j1
2l
[
i,j
=
u
t
[
i,j
+
l
2
6
3
u
t
3
+O(l
4
) (6.62)
u
i+1,j
2 [u
i,j+1
+ (1 )u
i,j1
] +u
i1,j
h
2
=
2
u
x
2
+
h
2
12
4
u
x
4
(2 1)
2l
h
2
u
t
+
l
2
h
2
2
u
t
2
+
O(h
4
,
l
3
h
2
) (6.63)
Restando una ecuacion de la otra se obtiene
u
i,j+1
u
i,j1
2l
u
i+1,j
2 [u
i,j+1
+ (1 )u
i,j1
] +u
i1,j
h
2
=
u
t
2
u
x
2
+
l
2
6
3
u
t
3
h
2
12
4
u
x
4
+
(2 1)
2l
h
2
u
t
+
l
2
h
2
2
u
t
2
+
O(h
4
,
l
3
h
2
, l
4
) (6.64)
Para aproximar con mas precision la ecuacion diferencial hace falta que tanto
h como l tiendan a cero. Ademas, por razones de estabilidad, conviene hacer que
el cociente entre l y h
2
permanezca constante. Por tanto, se supondra que en
todas las mallas k = rh
2
, siendo r alguna constante real que asegure estabilidad.
Entonces, cuando la anchura de la malla tiende a cero, la ecuacion anterior
muestra que el lmite de la ecuacion en diferencias es:
u
t
2
u
t
2
+ 2(2 1)r
u
t
(6.65)
Esta ecuacion solamente coincide con la ecuacion de difusion original si =
1
2
. En este caso se dice que la ecuacion en diferencias es consistente. En los
demas casos, en el que el lmite no es igual a la ecuacion diferencial, se dice que
la ecuacion es inconsistente.
Es importante resaltar que el concepto de consistencia requiere alguna es-
pecicacion de como se reduce la anchura de la malla. Ademas, el que se tenga
6.6. ELEMENTOS FINITOS Y LA ECUACI
ON DE DIFUSI
ON 97
una formula que aproxime correctamente cada derivada por separado no es su-
ciente para asegurar la consistencia, sino que es preciso examinar la ecuacion
completa.
Estabilidad y consistencia son, por tanto, dos condiciones necesarias para
asegurar que la ecuacion en diferencias converja a la ecuacion diferencial con-
forme se reduce la anchura de malla. Existe un resultado, conocido como el
teorema de Lax, que garantiza que en el caso de ecuaciones lineales es tambien
suciente.
6.6 Elementos nitos y la ecuacion de difusion
La ecuacion (6.1) se puede tambien resolver mediante el metodo de elementos
nitos. Sin embargo, dado que no es posible derivar esta ecuacion de un principio
variacional, es preciso obtener la forma debil en la que se basa el metodo de los
elementos nitos de alguna otra manera.
Recuerdese que la ecuacion de difusion tiene la forma:
u
t
= (u)
sujeto a u T [0, T]
u(x, 0) = f(x)
u(x, t) = g(x, t) x T
1
u(x,t)
n
= h(x, t) x T
2
(6.66)
Escrbase la funcion u como una serie
u = v
0
+
i
a
i
v
i
(6.67)
donde, como es habitual en el metodo de elementos nitos, v
0
cumple las con-
diciones de contorno esenciales, mientras que las v
i
se anulan en el contorno
esencial T
1
.
De la ecuacion (6.66) se sigue que
___
D
_
u
t
(u)
_
dv = 0 (6.68)
para cualquier funcion . En particular, para las funciones v
i
:
___
D
_
u
t
(u)
_
v
i
dv =
___
D
_
_
_
v
0
+
j
a
j
v
j
_
t
(
_
_
v
0
+
j
a
j
v
j
_
_
)
_
_
v
i
dv =
98 CAP
ITULO 6. LA ECUACI
ON DE DIFUSI
ON
___
D
v
0
t
v
i
dv
j
___
D
a
j
v
j
t
v
i
dv
___
(v
0
)v
i
dv
j
a
j
(v
j
)v
i
dv =
0 i (6.69)
Es costumbre tomar las funciones v
i
independientes del tiempo, aunque la
funcion v
0
puede ser variable si las condiciones de contorno esenciales lo son.
En este caso, en el desarrollo u = v
0
+
i
a
i
v
i
los coecientes a
i
son variables,
y la ecuacion anterior se simplica a:
___
D
_
u
t
(u)
_
v
i
dv =
___
D
v
0
t
v
i
dv +
j
da
j
dt
___
D
v
j
v
i
dv
___
(v
0
)v
i
dv
j
a
j
___
(v
j
)v
i
dv =
j
da
j
dt
M
j,i
c
i
+
j
I
j,i
= 0 i (6.70)
La matriz denida por
M
i,j
=
___
D
v
j
v
i
dv (6.71)
es conocido como matriz de masas. En cuanto a la matriz I
j,i
puede escribirse
de un modo mas familiar utilizando la formula de Green:
___
(v
j
)v
i
dv =
___
(v
i
v
j
) dv
___
v
j
v
i
dv =
_
__
D
v
i
v
j
n
ds
___
v
j
v
i
dv =
__
D2
v
i
v
j
n
ds
___
v
j
v
i
dv =
d
j,i
+K
j,i
(6.72)
donde K
i,j
es la matriz de rigidez introducida en el captulo 4. Substituyendo
en la ecuacion base
j
_
M
i,j
da
j
dt
K
i,j
a
j
(d
i,j
a
j
+c
i
)
_
= 0 (6.73)
6.6. ELEMENTOS FINITOS Y LA ECUACI
ON DE DIFUSI
ON 99
Por otra parte
j
d
i,j
a
j
+c
i
=
j
a
j
__
D2
v
i
v
j
n
ds +
___
(v
0
)v
i
dv =
__
D2
v
i
j
a
j
v
j
+v
0
n
ds+ =
__
D2
v
i
u
n
ds+ =
__
D2
v
i
h ds = b
i
(6.74)
notese que este es el coeciente que aparece como termino independiente en el
captulo 4. Finalmente, se obtiene
j
M
i,j
da
j
dt
=
j
K
i,j
a
j
+b
i
(6.75)
o, en forma matricial
M
da
dt
= Ka +b (6.76)
Esta ecuacion diferencial puede integrarse para obtener la solucion apro-
ximada a la ecuacion original. Las condiciones iniciales vienen dadas por la
aproximacion a la condicion inicial u(x, 0) = f(x).
La matriz de rigidez K es positiva denida, seg un se demostro en el captulo
4. Tambien lo es la matriz de masas M. Por tanto, la matriz M
1
K que aparece
en el sistema
da
dt
= M
1
Ka +M
1
b (6.77)
es positiva denida. Por tanto, el algoritmo de Crank-Nicholson, aplicado a esta
ecuacion debe ser estable. Es por ello que es una opcion muy popular para
resolver este sistema. La matriz del algoritmo es
G =
_
I
1
2
M
1
A
__
I +
1
2
M
1
A
_
1
=
_
M
1
2
A
__
M +
1
2
A
_
1
(6.78)
(6.79)
Por lo tanto, solamente es preciso factorizar la matriz M
1
2
A.
100 CAP
ITULO 6. LA ECUACI
ON DE DIFUSI
ON
Captulo 7
Problemas armonicos
7.1 Introduccion
Es frecuente que en problemas dependientes del tiempo las condiciones de con-
torno y las densidades de carga o de corriente tengan una dependencia senoidal
(o cosenoidal) del tiempo. Por ejemplo, la ecuacion de difusion toma a menudo
la forma particular:
u
t
= (u)
sujeto a u T [0, T]
u(x, 0) = f(x)
u(x, t) = g
0
(x) cos (t +
g
(x)) x T
1
u(x,t)
n
= h
0
(x) cos (t +
h
(x)) x T
2
(7.1)
La constante es la frecuencia del problema. Notese que aunque se han utili-
zado funciones coseno para describir la dependencia temporal de las condiciones
de contorno, podran haberse utilizado igualmente bien funciones seno, sin mas
que cambiar las fases
(x) por
(x) +
pi
2
.
La solucion de esta ecuacion es la suma de un termino transitorio, que se
va amortiguando conforme el tiempo nal T tiende a innito, y un termino
permanente, que presenta una dependencia cosenoidal del tiempo. Una de las
maneras mas sencillas de demostrar este hecho es utilizar la ecuacion de difusion
discretizada (6.15):
d
dt
u(t) = Au(t) +b(t) (7.2)
Recuerdese que la matriz A representa el operador laplaciano, y es cons-
tante; mientras que el vector b(t) lleva la informacion sobre las condiciones de
contorno. Como estas son cosenoidales, es facil ver que
101
102 CAP
ITULO 7. PROBLEMAS ARM
ONICOS
b
i
(t) = b
0i
cos (t +
i
) (7.3)
Por otra parte, la solucion de (7.2) es
u(t) = exp [At] u(0) +
_
t
0
exp [A(t s)] b(s) ds (7.4)
El primer termino tiende a cero cuando t tiende a innito. En efecto, como
se comento en la secci on 6.4, los autovalores de A son negativos, por lo que que
la matriz exp [At] tiende a cero cuando t tiende a innito. Esto signica que
el efecto de las condiciones iniciales, que estan representadas en el vector u(0),
tiende a desaparecer conforme el tiempo crece, siendo el estado al cabo de un
tiempo largo independiente de la manera en que se origino, lo que cabe esperar
por razones fsicas. Tambien signica que la solucion u(t) permanece acotada:
si los autovalores de A fueran positivos la exponencial crecera sin lmite, lo que
es fsicamente absurdo. En cualquier caso, se obtiene para tiempos grandes:
u(t) =
_
t
0
exp [A(t s)] b(s) ds (7.5)
7.2 Notacion compleja
La integral anterior puede resolverse de una forma particularmente sencilla uti-
lizando n umeros complejos. En efecto,
b
i
(t) = b
0i
cos (t +
i
) (7.6)
= '[b
0i
exp (t +
i
)] (7.7)
= '(
b
0i
exp t) (7.8)
En este captulo se seguira la conveccion de que es la unidad imaginaria,
z un n umero complejo, z
su complejo conjugado y ' e las partes real e
imaginaria respectivamente. Entonces
b(t) = '(
b
0
e
t
) (7.9)
=
1
2
_
b
0
e
t
+
b
0
e
t
_
(7.10)
(7.11)
Utilizando este resultado para calcular la integral
u(t) =
_
t
0
exp [A(t s)] b(s) ds
=
_
t
0
exp [A(t s)]
1
2
_
b
0
e
s
+
b
0
e
s
_
ds
7.2. NOTACI
ON COMPLEJA 103
=
_
t
0
1
2
_
b
0
exp [A(t s) + s] +
b
0
exp [A(t s) s]
_
ds
=
1
2
_
b
0
[A]
1
_
e
t
e
At
0
[A+ ]
1
_
e
t
e
At
_
(7.12)
Como e
At
tiende a cero cuando t tiende a innito, para tiempos grandes esta
expresion se puede simplicar a:
u(t) =
1
2
_
b
0
[A]
1
e
t
+
b
0
[A+ ]
1
e
t
_
(7.13)
=
1
2
_
u
0
e
t
+ u
0
e
t
_
(7.14)
= '
_
u
0
e
t
_
(7.15)
siendo
u
0
=
b
0
[A]
1
(7.16)
De otra forma
u
0
= A u
0
+
b
0
(7.17)
Comparando con la ecuacion original (7.2),
d
dt
u(t) = Au(t) +b(t) (7.18)
se observa que para pasar de la una a la otra se han hecho los siguientes cambios:
1. Se han substituido la funci on del tiempo b(t) por el vector de n umeros
complejos
b
0
. Estos n umeros complejos se calculan mediante las ecuacio-
nes (7.6,7.7,7.8). Analogamente con la funcion u(t) y el vector u
0
.
2. Se ha substituido la derivada respecto al tiempo por el producto por .
Estas reglas son generales para obtener la respuesta permanente en regimen
senoidal de ecuaciones diferenciales lineales.
B asico
_ Avanzado
Por ejemplo, en el caso de que se preriera resolver la ecuacion de difusion
mediante elementos nitos, habra que pasar de
M
da(t)
dt
= Ka(t) +b(t) (7.19)
a
M a
0
= K a
0
+
b
0
(7.20)
104 CAP
ITULO 7. PROBLEMAS ARM
ONICOS
7.3 Difusion magnetica e histeresis
Un problema frecuente es el calculo de campos magneticos y electricos en cir-
cunstancias donde las corrientes de desplazamiento son despreciables. La cuarta
ecuacion de Maxwell es entonces:
H = j (7.21)
Aplicando la ley de Ohm
H = E (7.22)
=
_
V
A
t
_
(7.23)
= j
s
A
t
(7.24)
El termino j
s
son las corrientes impuestas por el potencial V , que suele ser
dato del problema. Por otra parte, como B = H,
_
1
A
_
= j
s
A
t
(7.25)
En medios ferromagneticos, el n umero no es una constante, sino que de-
pende del propio campo B, debido a la existencia de fenomenos de saturacion e
histeresis. Esto causa que, a un cuando el campo H tenga una dependencia se-
noidal del tiempo, el campo B (y por tanto A) no lo tenga, haciendo imposible
la aplicacion de los metodos de la seccion anterior, que se basa en que todas las
magnitudes tengan dependencia senoidal.
Existe, no obstante, una forma aproximada de tratar el problema de la
histeresis. Esta consiste en la substitucion del ciclo real de histeresis por un
ciclo aproximado elptico (ver gura 7.1). Esta aproximacion es equivalente a la
utilizacion de una constante compleja.
En efecto, supongase que H presenta una dependencia senoidal del tiempo
H(x, t) = H
0
(x) cos (t +
H
(x)) (7.26)
De acuerdo con los metodos de la seccion anterior, se puede asociar a este
campo, el campo complejo no dependiente del tiempo:
H
0
= H
0
e
H
(7.27)
Se puede calcular ahora el campo
B
0
multiplicando por la constante compleja
:
B
0
=
H
0
(7.28)
= e
H
0
e
H
(7.29)
= H
0
e
(+
H
)
(7.30)
= B
0
e
B
(7.31)
7.3. DIFUSI
ON MAGN
ETICA E HIST
ERESIS 105
H
B
Figura 7.1: Ciclos de histeresis real y aproximado
Este campo complejo tiene asociado el campo real dependiente del tiempo
B(x, t) = B
0
(x) cos (t +
B
(x)) (7.32)
Ahora, a partir de (7.26) y (7.32)
B(x, t) = B
0
cos (t +
B
)
= H
0
cos (t + (
+
H
))
= H
0
cos (t +
H
) cos
H
0
sin (t +
H
) sin
= H
0
H
H
0
cos
H
0
1
_
H
H
0
_
2
sin
(7.33)
Luego
H
0
sin
1
_
H
H
0
_
2
= Hcos
2
H
2
0
sin
2
_
1
_
H
H
0
_
2
_
=
2
H
2
cos
2
+B
2
2HBcos
Ya que al ser los vectores B y H son paralelos, BH = BH. As pues:
106 CAP
ITULO 7. PROBLEMAS ARM
ONICOS
2
H
2
0
sin
2
2
H
2
sin
2
=
2
H
2
cos
2
+B
2
2HBcos
2
H
2
+B
2
2HBcos
=
2
H
2
0
sin
2
(7.34)
que es claramente la ecuacion de una elipse en el pano B H. Pero esto es lo
que se quera demostrar.
Notese que con este metodo se ha modelado la histeresis, pero no la satu-
racion. En efecto, al aumentar
H
0
, tambien aumenta proporcionalmente
B
0
=
H
0
, en vez de aumentar a un ritmo menor al saturarse el material.
Con estas cualicaciones, la ecuacion (7.25) se transforma en
_
1
A
0
_
=
j
s0
A
0
(7.35)
Ahora, no queda mas que considerar las condiciones de contorno en
A
0
, dis-
cretizar las derivadas respecto al espacio, y resolver la ecuacion lineal compleja
resultante.
Bibliografa
La bibliografa existente sobre la resolucion de ecuaciones de campo es suma-
mente extensa, y ciertamente no existe aqu el proposito de presentarla de una
forma exhaustiva
1
, sino mas bien indicar algunos textos en los que el lector
interesado puede ampliar conocimientos.
Un libro excelente de introduccion a la resolucion moderna (como contra-
puesta a la de preguerra) de sistemas lineales es:
Linear Algebra and its Applications, G. Strang, Saunders College Pu-
blishing.
Y para los mas exigentes, la referencia es:
Matrix Computations, G. H. Golub and C. F. van Loan, John Hopkins
University Press.
Una buena introduccion a las diferencias nitas, con un gran n umero de
ejemplos trabajados:
Numerical Solution of Partial Dieretial Equations: Finite Dierence Met-
hods, G. D. Smith, Oxford University Press.
Uno de los autores de la primera referencia tambien tiene escrita una intro-
duccion muy clara a la teora matematica de los elementos nitos:
An Analysis of the Finite Element Method, G. Strang and G. J. Fix,
Pretince-Hall.
Mas completo (o mas pesado), tanto desde el aspecto matematico (cubre
elementos y diferencias nitas, y otras cosas) como del algortmico, es:
Numerical Approximation of Partial Dierential Equations, A. Quarte-
roni and A. Valli, Springer-Verlag.
Desde el punto de vista de las aplicaciones a problemas de ingeniera, es
entretenido:
What Every Engineer should know about Finite Element Analysis, J.
R. Brauer, Marcel Dekker.
1
Tarea para la que, por otra parte, el autor no se siente capacitado.
107
You might also like
- Magister en MatematicaDocument20 pagesMagister en MatematicaCamila AlbaresNo ratings yet
- 03-Analisis de Esfuerzos-Parte 3Document27 pages03-Analisis de Esfuerzos-Parte 3JHONATAN ALEXANDER ROSALES PORTILLANo ratings yet
- Valores y vectores propios en matricesDocument5 pagesValores y vectores propios en matricesKEVIN ALEXIS TOAQUIZA PUCONo ratings yet
- Valores y Vectores Propios de Varias Matrices 3x3Document4 pagesValores y Vectores Propios de Varias Matrices 3x3hortonpageNo ratings yet
- 280 1273 1 PBDocument16 pages280 1273 1 PBEnmanuel David Colmenares ArandiaNo ratings yet
- Tarea Control Moderno REALIMANETACION DE ESTADO Y SIMULACIONDocument43 pagesTarea Control Moderno REALIMANETACION DE ESTADO Y SIMULACIONJosset Aldridge AguilaNo ratings yet
- Diagonalizaciòn OrtogonalDocument15 pagesDiagonalizaciòn OrtogonalFernando NoriegaNo ratings yet
- Capitulo 2Document15 pagesCapitulo 2Valeria FernandaNo ratings yet
- Capitulo 2 - Analisis No LinealDocument25 pagesCapitulo 2 - Analisis No LinealWaldir ValeroNo ratings yet
- Modelos lineales con valores en la fronteraDocument29 pagesModelos lineales con valores en la fronterajose218250% (2)
- Taller Algebra Lineal Poli JICDocument15 pagesTaller Algebra Lineal Poli JICLuis Javier LoraNo ratings yet
- Ejemplo de Practica Modelado de Variables de EstadoDocument21 pagesEjemplo de Practica Modelado de Variables de EstadoMiguel Alex ReyesNo ratings yet
- Álgebra Lineal-Matrices, Determinantes, Espacios Vectoriales y Transformaciones LinealesDocument2 pagesÁlgebra Lineal-Matrices, Determinantes, Espacios Vectoriales y Transformaciones LinealesKevin GonzalesNo ratings yet
- Taller Pre Examen AlgebraDocument3 pagesTaller Pre Examen AlgebraNicolas Herrera SarmientoNo ratings yet
- Algebra LinealDocument2 pagesAlgebra LinealSú HernándezNo ratings yet
- Lab 1 ControlDocument11 pagesLab 1 ControlJose VizarretaNo ratings yet
- Taller1 2021 1Document3 pagesTaller1 2021 1JuanDa CorreaNo ratings yet
- Control 2 SolucionDocument4 pagesControl 2 SolucionAlberto SerranoNo ratings yet
- Sistema Dinamico Discreto y Matrices (Un Ejemplo)Document8 pagesSistema Dinamico Discreto y Matrices (Un Ejemplo)Matias BuccinoNo ratings yet
- VF 1ºcuat2024 1 99Document113 pagesVF 1ºcuat2024 1 99elmauritoxdNo ratings yet
- 7 EstabilidadDocument57 pages7 EstabilidadChristian VelazquezNo ratings yet
- Mecanica CuanticaDocument66 pagesMecanica CuanticaJaneth EspinolaNo ratings yet
- Ejercicios Capitulo 1Document4 pagesEjercicios Capitulo 1Carlos UrreaNo ratings yet
- Álgebra LinealDocument4 pagesÁlgebra LinealAndrés VorjaNo ratings yet
- Tarea I Parcial MM412 II-2017Document2 pagesTarea I Parcial MM412 II-2017Andrea RiveraNo ratings yet
- Lab1 Funcion de TransferenciaDocument11 pagesLab1 Funcion de TransferenciaAdyanis RiosNo ratings yet
- S 06-Wa PDFDocument30 pagesS 06-Wa PDFRonald Alexander Pacheco NarroNo ratings yet
- Universidad Nacional Agraria La Molina Facultad de Ciencias Departamento Académico de MatemáticaDocument2 pagesUniversidad Nacional Agraria La Molina Facultad de Ciencias Departamento Académico de MatemáticaGabriel BardalesNo ratings yet
- Beamer Cholesky PDFDocument56 pagesBeamer Cholesky PDFLUIS ISAAC LEON PARONo ratings yet