You might also like
- Texstudio-2 10 2-ReadmeDocument1 pageTexstudio-2 10 2-ReadmePratik D UpadhyayNo ratings yet
- C7 Engineering Materials Metals: Prof. Dr. Rer. Nat. S. SchmauderDocument72 pagesC7 Engineering Materials Metals: Prof. Dr. Rer. Nat. S. SchmauderPratik D UpadhyayNo ratings yet
- ETH Struct OptDocument226 pagesETH Struct OptPratik D UpadhyayNo ratings yet
- Buckling Analysis Laminates PDFDocument7 pagesBuckling Analysis Laminates PDFPratik D UpadhyayNo ratings yet
- ResumeDocument6 pagesResumePratik D UpadhyayNo ratings yet
- DocumentcDocument18 pagesDocumentcPratik D UpadhyayNo ratings yet
- Abaqus Shell FormulationDocument118 pagesAbaqus Shell FormulationPratik D UpadhyayNo ratings yet
- Basic Sens Analysis Review PDFDocument26 pagesBasic Sens Analysis Review PDFPratik D UpadhyayNo ratings yet
- Bem ProblemDocument6 pagesBem ProblemPratik D UpadhyayNo ratings yet
- Cam 5Document6 pagesCam 5Pratik D UpadhyayNo ratings yet
- Iit Gate 2013Document2 pagesIit Gate 2013Nishant JainNo ratings yet
- Original SynopsisDocument1 pageOriginal SynopsisPratik D UpadhyayNo ratings yet
- Cam 1Document4 pagesCam 1Pratik D UpadhyayNo ratings yet
- 2D Triangular ElementsDocument15 pages2D Triangular ElementsPratik D UpadhyayNo ratings yet
- Method of Weighted ResidualsDocument12 pagesMethod of Weighted ResidualsArun ChandNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- MF 5460Document586 pagesMF 5460Maximiliano Hitschfeld100% (2)
- Area Manager ChecklistDocument7 pagesArea Manager ChecklistUtkarsh RaiNo ratings yet
- Chapter 6 (Latest) - Value Orientation and Academic AchievementDocument21 pagesChapter 6 (Latest) - Value Orientation and Academic AchievementNur Khairunnisa Nezam IINo ratings yet
- Directory of Importers Associations Worldwide 2009Document57 pagesDirectory of Importers Associations Worldwide 2009Thanh Tam75% (12)
- Power and Energy Meters: Model No. Remarks Sl. WH WH W Va Var 1. ET3021 ET4021Document1 pagePower and Energy Meters: Model No. Remarks Sl. WH WH W Va Var 1. ET3021 ET4021Ram KumarNo ratings yet
- Bashar Discusses Monatomics, White Powder Gold and Ormus MineralsDocument32 pagesBashar Discusses Monatomics, White Powder Gold and Ormus MineralsFlorin V. Iagaru100% (6)
- GRADES 1 To 12 Daily Lesson Log Monday Tuesday Wednesday Thursday FridayDocument3 pagesGRADES 1 To 12 Daily Lesson Log Monday Tuesday Wednesday Thursday FridaySheilaMarB.Esteban100% (1)
- HypnosisDocument2 pagesHypnosisEsteban MendozaNo ratings yet
- Reynaers Product Overview CURTAIN WALLDocument80 pagesReynaers Product Overview CURTAIN WALLyantoNo ratings yet
- The Danieli Danarc Plus M Furnace at Abs Meltshop: Aldo A. Fior Danieli C M - Process Engineer Buttrio, ItalyDocument6 pagesThe Danieli Danarc Plus M Furnace at Abs Meltshop: Aldo A. Fior Danieli C M - Process Engineer Buttrio, ItalyBrandon CoxNo ratings yet
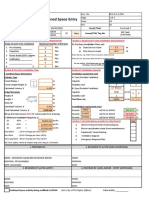
- Ventilation Plan For Confined Space EntryDocument9 pagesVentilation Plan For Confined Space EntryMohamad Nazmi Mohamad Rafian100% (1)
- Spare Parts Manual (HB2200-2000DP)Document20 pagesSpare Parts Manual (HB2200-2000DP)drmasster100% (1)
- Ecco ADocument5 pagesEcco Aouzun852No ratings yet
- No Curfew for College Dorm StudentsDocument2 pagesNo Curfew for College Dorm Students陳玟蓁No ratings yet
- Synopsis Sagar Project - A Study On The Need of CRM in OrganizatonDocument3 pagesSynopsis Sagar Project - A Study On The Need of CRM in OrganizatonViraja GuruNo ratings yet
- DHP UM 015 IHP24 HART User ManualDocument70 pagesDHP UM 015 IHP24 HART User Manualkumar ambujNo ratings yet
- Ropes and Wires: Malaysian Maritime Academy/Seamanship/May2003 1 of 6Document6 pagesRopes and Wires: Malaysian Maritime Academy/Seamanship/May2003 1 of 6Rohit SinghNo ratings yet
- Communication Systems Engineering John G Proakis Masoud Salehi PDFDocument2 pagesCommunication Systems Engineering John G Proakis Masoud Salehi PDFKatie0% (2)
- Product PlanningDocument23 pagesProduct PlanningGrechen CabusaoNo ratings yet
- Design Prof BlankoDocument11 pagesDesign Prof BlankoAousten AAtenNo ratings yet
- Troubleshooting Lab 1Document1 pageTroubleshooting Lab 1Lea SbaizNo ratings yet
- Starting and Configuring Crontab in CygwinDocument2 pagesStarting and Configuring Crontab in CygwinSamir BenakliNo ratings yet
- Vision and Mission Analysis ChapterDocument15 pagesVision and Mission Analysis Chapterzaza bazazaNo ratings yet
- HydrodynamicsDocument122 pagesHydrodynamicsIustin Cristian100% (2)
- Research Associate in The DFG Graduate Program - Collective Decision-Making - (12 Positions) - 28 Subsection 3 HMBHGDocument3 pagesResearch Associate in The DFG Graduate Program - Collective Decision-Making - (12 Positions) - 28 Subsection 3 HMBHGFiya ShahNo ratings yet
- Lorry AirBrakesDocument3 pagesLorry AirBrakesEnache CristinaNo ratings yet
- Local Materials Used in Creating Art and TechniquesDocument29 pagesLocal Materials Used in Creating Art and TechniquesAnne Carmel PinoNo ratings yet
- MrsDocument8 pagesMrsalien888No ratings yet
- Porter's Five Forces: Submitted by Subham Chakraborty PGDMDocument5 pagesPorter's Five Forces: Submitted by Subham Chakraborty PGDMSubham ChakrabortyNo ratings yet
- Cisco and Duo Presentation 8.2.18Document8 pagesCisco and Duo Presentation 8.2.18chris_ohaboNo ratings yet