You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Heavy Lifting Risk AssessmentsDocument9 pagesHeavy Lifting Risk AssessmentsSayed Darwish100% (6)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- QSV 2 Product Release Procedure EN 01 PDFDocument6 pagesQSV 2 Product Release Procedure EN 01 PDFprashanthNo ratings yet
- Midas Manual PDFDocument49 pagesMidas Manual PDFNishad Kulkarni100% (1)
- ROBT308Lecture22Spring16 PDFDocument52 pagesROBT308Lecture22Spring16 PDFrightheartedNo ratings yet
- Chapter 3.3 - Cashflow and Continuous Compounding Sample ProblemsDocument14 pagesChapter 3.3 - Cashflow and Continuous Compounding Sample ProblemsArin ParkNo ratings yet
- The Green Marketing "Revolution" - Is It WorthDocument12 pagesThe Green Marketing "Revolution" - Is It WorthAndrew SmithNo ratings yet
- Certifi Cati N: Salary DoesDocument8 pagesCertifi Cati N: Salary DoesGeeNo ratings yet
- Drawbacks of The Existing SystemDocument7 pagesDrawbacks of The Existing SystemSachin Mohite100% (1)
- GSM ALARMDocument17 pagesGSM ALARMDragan StanicNo ratings yet
- Types of Machine DrawingDocument19 pagesTypes of Machine DrawingAmexTesfayeKora100% (5)
- 36-217 Fall 2013 HW04Document2 pages36-217 Fall 2013 HW04Gabriel Bernard MullenNo ratings yet
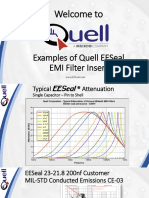
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsDocument15 pagesExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinNo ratings yet
- Dissolving Clouds With Your MindDocument14 pagesDissolving Clouds With Your MindTamajong Tamajong PhilipNo ratings yet
- Dec2113 Early Science (Individual Assignment)Document4 pagesDec2113 Early Science (Individual Assignment)FanizahNo ratings yet
- Applying COCOMO II - A Case StudyDocument57 pagesApplying COCOMO II - A Case StudyMeghraj SapkotaNo ratings yet
- Personal Details:: User ID Candidate's NameDocument9 pagesPersonal Details:: User ID Candidate's NameAnkur SharmaNo ratings yet
- POL 203 Intro To Western Political PhilosophyDocument202 pagesPOL 203 Intro To Western Political PhilosophyShan Ali Shah100% (1)
- Chapter 1: History, Definition and Benefits of ReadingDocument12 pagesChapter 1: History, Definition and Benefits of ReadingKreshia KC IledanNo ratings yet
- B1 IF-Clauses IF006: WWW - English-Practice - atDocument2 pagesB1 IF-Clauses IF006: WWW - English-Practice - atAyeshaNo ratings yet
- Active Suspension Using SkyhookDocument14 pagesActive Suspension Using SkyhookSandor CleganeNo ratings yet
- Shared Universe IntroDocument9 pagesShared Universe IntroLeafbladeNo ratings yet
- Tutorial - Creating Bottle Using Surface Techniques in SolidWorks - GrabCAD Tutorials PDFDocument16 pagesTutorial - Creating Bottle Using Surface Techniques in SolidWorks - GrabCAD Tutorials PDFovercomeboyNo ratings yet
- Transverse ShearDocument4 pagesTransverse ShearrajdrklNo ratings yet
- Tech Bull 3 - Free Fall of ConcreteDocument4 pagesTech Bull 3 - Free Fall of ConcreteJoel TorcuatorNo ratings yet
- Mewar University Chittorgarh - Power System EngineeringDocument38 pagesMewar University Chittorgarh - Power System Engineeringnved01No ratings yet
- Chebyshevs Inequality - ProblemspdfDocument6 pagesChebyshevs Inequality - ProblemspdfamreenNo ratings yet
- Bekele (2005) Urbanization and Urban SprawlDocument65 pagesBekele (2005) Urbanization and Urban Sprawlentbeard77100% (3)
- Nonverbal Communication in The WorkplaceDocument7 pagesNonverbal Communication in The WorkplaceHenrissa Granado TalanNo ratings yet
- Modeling of Deepwater-Type Rectangular Tuned Liquid Damper With Submerged NetsDocument10 pagesModeling of Deepwater-Type Rectangular Tuned Liquid Damper With Submerged NetsDhirendra Kumar PandeyNo ratings yet
- 2046 Def Scriptie Dennis Wessing PDFDocument170 pages2046 Def Scriptie Dennis Wessing PDFRK CISANo ratings yet