You might also like
- BLDC Motor DriverDocument6 pagesBLDC Motor DriverjpmacabascoNo ratings yet
- ML4425 Sensor Less BLDC Motor ControllerDocument17 pagesML4425 Sensor Less BLDC Motor Controllerfrazier8553No ratings yet
- BLDCDocument4 pagesBLDCsathishNo ratings yet
- Application of Brushless DC Motor in MilitaryDocument10 pagesApplication of Brushless DC Motor in Militarymighty_heart100% (1)
- BLDC MotorDocument46 pagesBLDC MotorShafira AuliaNo ratings yet
- BLDC DriverDocument8 pagesBLDC DriverRich ManNo ratings yet
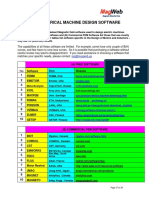
- Design Software 1Document2 pagesDesign Software 1anbarasuval84No ratings yet
- Modeling and Simulation of BLDC Motor in MATLABDocument5 pagesModeling and Simulation of BLDC Motor in MATLABvishiwizardNo ratings yet
- BLDCDocument4 pagesBLDCmechtex Pvt LtdNo ratings yet
- of BLDCDocument45 pagesof BLDCsmhbNo ratings yet
- PIC-EK User Manual PDFDocument91 pagesPIC-EK User Manual PDFDjura CurugNo ratings yet
- The Definitive Guide to How Computers Do Math: Featuring the Virtual DIY CalculatorFrom EverandThe Definitive Guide to How Computers Do Math: Featuring the Virtual DIY CalculatorNo ratings yet
- How To Make Sodium PerchlorateDocument17 pagesHow To Make Sodium PerchlorateKing90No ratings yet
- 2.review of Literature and Statement of ProblemDocument6 pages2.review of Literature and Statement of ProblemsheriabhiNo ratings yet
- Brushless DC MotorDocument6 pagesBrushless DC Motorpsksiva13No ratings yet
- Permanent Magnet Motor GuideDocument36 pagesPermanent Magnet Motor GuidekkarthiksNo ratings yet
- Design and Development of Three Phase Permanent Magnet BrushlessDocument11 pagesDesign and Development of Three Phase Permanent Magnet BrushlessteomondoNo ratings yet
- Speed Control for BLDC Motors Using PID Algorithm WhitepaperDocument14 pagesSpeed Control for BLDC Motors Using PID Algorithm Whitepapertoufani95No ratings yet
- Direct Back EMF Detection Method for Sensorless BLDC DrivesDocument91 pagesDirect Back EMF Detection Method for Sensorless BLDC DrivesnicoletabytaxNo ratings yet
- BLDC Product GuideDocument36 pagesBLDC Product GuidemjtbbhrmNo ratings yet
- SM Auhf12lal Aohb12lall 10 en PDFDocument25 pagesSM Auhf12lal Aohb12lall 10 en PDFpepondeAviles100% (1)
- Research and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968From EverandResearch and Development in Non-Mechanical Electrical Power Sources: Proceedings of the 6th International Symposium Held at Brighton, September 1968No ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Advanced Seat Suspension Control System Design for Heavy Duty VehiclesFrom EverandAdvanced Seat Suspension Control System Design for Heavy Duty VehiclesNo ratings yet
- Power Electronics and Electric Drives for Traction ApplicationsFrom EverandPower Electronics and Electric Drives for Traction ApplicationsNo ratings yet
- Design of Three Phase Inverter Fed Induction Motor Drive Using Neural Network Predictive ControlDocument5 pagesDesign of Three Phase Inverter Fed Induction Motor Drive Using Neural Network Predictive Controlesatjournals100% (1)
- Electrical Correcting Elements in Automatic Control and Regulation CircuitsFrom EverandElectrical Correcting Elements in Automatic Control and Regulation CircuitsNo ratings yet
- Electric Motor Drives and their Applications with Simulation PracticesFrom EverandElectric Motor Drives and their Applications with Simulation PracticesNo ratings yet
- Arduino Based Sensorless Speed Control of BLDC Motor Using GSMDocument6 pagesArduino Based Sensorless Speed Control of BLDC Motor Using GSMRaja Ramesh DNo ratings yet
- ZRP Catalog 2019 PDFDocument68 pagesZRP Catalog 2019 PDFMichaelNo ratings yet
- Temperature SensorsDocument14 pagesTemperature SensorsViktor -stNo ratings yet
- Circuit Simulation of A BLDC MotorDocument4 pagesCircuit Simulation of A BLDC MotorjpmacabascoNo ratings yet
- Ignition Systems For Gasoline EnginesDocument27 pagesIgnition Systems For Gasoline Enginesanon_53273932No ratings yet
- Everything About BLDC MotorsDocument22 pagesEverything About BLDC MotorsNyn SoniNo ratings yet
- Laser spectroscopy IXFrom EverandLaser spectroscopy IXMichael FeldNo ratings yet
- D.C. Powered Timing Light Model 161.2158 for 12 Volt Ignition Systems Sears Owners ManualFrom EverandD.C. Powered Timing Light Model 161.2158 for 12 Volt Ignition Systems Sears Owners ManualNo ratings yet
- Control of BLDC MotorDocument55 pagesControl of BLDC MotorankitNo ratings yet
- Medical Application of BLDCDocument5 pagesMedical Application of BLDCAbd Al HAmidNo ratings yet
- MotorsDocument18 pagesMotorsAmado CamachoNo ratings yet
- Leisure Products For Caravans and Motor Caravans: Product CatalogueDocument44 pagesLeisure Products For Caravans and Motor Caravans: Product CataloguenitramariomNo ratings yet
- Reduction of Power MOSFET Losses in Hard-Switched ConvertersDocument2 pagesReduction of Power MOSFET Losses in Hard-Switched ConvertersWesley de PaulaNo ratings yet
- Modeling and Simulation of Reluctance Motor Using Digital ComputerDocument5 pagesModeling and Simulation of Reluctance Motor Using Digital ComputerroyourboatNo ratings yet
- A Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationsDocument3 pagesA Dual-Voltage Self-Clamped IGBT For Automotive Ignition ApplicationslionpjrNo ratings yet
- BLDC SimulationDocument4 pagesBLDC SimulationSiva GuruNo ratings yet
- Stepper Motor Drive System for Robotic ApplicationsDocument11 pagesStepper Motor Drive System for Robotic ApplicationsPrerith Subramanya100% (2)
- SC Diy Tci TriggerDocument15 pagesSC Diy Tci TriggerElias CoronelNo ratings yet
- Cruise Control of Bruhless DC MotorDocument12 pagesCruise Control of Bruhless DC MotorVishal PhadtareNo ratings yet
- Speed Control of BLDC MotorDocument5 pagesSpeed Control of BLDC Motorgourav kakhaniNo ratings yet
- An Introduction To Brushless DC Motor ControlDocument33 pagesAn Introduction To Brushless DC Motor ControlIgor TrimcevskiNo ratings yet
- MICROCONTROLLER-based DC Motor Speed ControllerDocument8 pagesMICROCONTROLLER-based DC Motor Speed Controllerranjithsim100% (1)
- Catalog CureleDocument0 pagesCatalog CureleCristi CryyNo ratings yet
- Analysis of Axial Flux MotorDocument4 pagesAnalysis of Axial Flux MotorAvi GuptaNo ratings yet
- Design and Implementation of Web Based Remote Supervisory Control and Information SystemDocument9 pagesDesign and Implementation of Web Based Remote Supervisory Control and Information SystemChandrashekar ReddyNo ratings yet
- F2VDocument2 pagesF2VChandrashekar ReddyNo ratings yet
- Electrocardiograms PDFDocument36 pagesElectrocardiograms PDFChandrashekar ReddyNo ratings yet
- Android Based ECG Monitoring System PDFDocument6 pagesAndroid Based ECG Monitoring System PDFChandrashekar ReddyNo ratings yet
- Online Building Monitoring and Control SystemDocument8 pagesOnline Building Monitoring and Control SystemChandrashekar ReddyNo ratings yet
- P 696Document21 pagesP 696Chandrashekar ReddyNo ratings yet
- Design PatternsDocument21 pagesDesign PatternsChandrashekar ReddyNo ratings yet
- MotivationDocument11 pagesMotivationChandrashekar Reddy0% (1)
- VTU Project on Intelligent Vehicular MonitoringDocument9 pagesVTU Project on Intelligent Vehicular MonitoringChandrashekar ReddyNo ratings yet
- Build A Robotic ArmDocument6 pagesBuild A Robotic ArmsikridheerajNo ratings yet
- Robot Arm Control Using Arm ProcessorDocument1 pageRobot Arm Control Using Arm ProcessorChandrashekar ReddyNo ratings yet
- Interfacing diagram of key componentsDocument24 pagesInterfacing diagram of key componentsChandrashekar ReddyNo ratings yet
- 625-NR Consolidated NovemberDocument321 pages625-NR Consolidated NovemberArturoNo ratings yet
- GRAS 46BE 1/4Document9 pagesGRAS 46BE 1/4nino16041973No ratings yet
- Instructions For Installation, Operating and Maintenance InstructionDocument30 pagesInstructions For Installation, Operating and Maintenance InstructionmilacronNo ratings yet
- Tli R3.0 PDFDocument6,465 pagesTli R3.0 PDFz_sadiq25% (4)
- Mock Test Jee MainDocument142 pagesMock Test Jee MainAkash Ghosh0% (1)
- What Is A Gantt Chart - Gantt Chart Information, History and SoftwareDocument3 pagesWhat Is A Gantt Chart - Gantt Chart Information, History and SoftwareShaikh Saeed AlamNo ratings yet
- A JIT Lot Splitting Model For Supply Chain Management Enhancing Buyer Supplier Linkage 2003 International Journal of Production EconomicsDocument10 pagesA JIT Lot Splitting Model For Supply Chain Management Enhancing Buyer Supplier Linkage 2003 International Journal of Production EconomicsDaniel Renaldo SimanjuntakNo ratings yet
- Air Conditioning Fact SheetDocument6 pagesAir Conditioning Fact SheetrjchpNo ratings yet
- PI Digital Panel Indicator - B0Document7 pagesPI Digital Panel Indicator - B0dtoxidNo ratings yet
- PL-BRICK HP 2850 740 2X6: Product DatasheetDocument4 pagesPL-BRICK HP 2850 740 2X6: Product DatasheetAbhilash ThomasNo ratings yet
- 07 AlarmManagement enDocument39 pages07 AlarmManagement enLuis RodriguezNo ratings yet
- 3M Cold Shrink Cable Joints MV HV 11kV 33kV 66kV BrochureDocument4 pages3M Cold Shrink Cable Joints MV HV 11kV 33kV 66kV BrochureMohammed MustafaNo ratings yet
- 1,3,3-Trinitroazetidine (TNAZ) - Part I. Syntheses and PropertiesDocument23 pages1,3,3-Trinitroazetidine (TNAZ) - Part I. Syntheses and PropertiesThanh XomNo ratings yet
- The Magnaflux Advantage (Whole Catalog)Document51 pagesThe Magnaflux Advantage (Whole Catalog)Andy StkNo ratings yet
- Biological ExerciseDocument6 pagesBiological ExerciseTanmoy BasakNo ratings yet
- Indian Standards As On 17.01.2004 LatestDocument19 pagesIndian Standards As On 17.01.2004 LatestSaravana KumarNo ratings yet
- R5310105-Structural Analysis - IIDocument4 pagesR5310105-Structural Analysis - IIsivabharathamurthyNo ratings yet
- Under Water WeldingDocument23 pagesUnder Water WeldingNishanth GowdaNo ratings yet
- TF Section - MICET 2016Document21 pagesTF Section - MICET 2016Eddie D SouzaNo ratings yet
- Otago:Polytechnic: National Diploma in Drinking Water AssessmentDocument33 pagesOtago:Polytechnic: National Diploma in Drinking Water AssessmentThomas CollinsNo ratings yet
- Effectiveness Ntu MethodDocument4 pagesEffectiveness Ntu MethodBen Musimane100% (1)
- Elective-II: Pavement Analysis & Design: B.E. (Civil Engineering) Eighth Semester (C.B.S.)Document6 pagesElective-II: Pavement Analysis & Design: B.E. (Civil Engineering) Eighth Semester (C.B.S.)Adesh DeshbhratarNo ratings yet
- Strategic Supply Chain Management and LogisticsDocument16 pagesStrategic Supply Chain Management and LogisticsNalaka Manawadu67% (3)
- WWW - Incar.tw-Kobelco SK 75 Service ManualDocument5 pagesWWW - Incar.tw-Kobelco SK 75 Service Manualpurnomo0% (1)
- Ricoh 2090Document832 pagesRicoh 2090cosmin176100% (1)
- Software TestingDocument3 pagesSoftware TestingDr. P. N. Renjith Associate Professor - CSENo ratings yet
- GuidewireClaimCenter Performance TestPlanDocument18 pagesGuidewireClaimCenter Performance TestPlanshanthan117No ratings yet
- Bluskies Engineering PVT LTD: Acp Panel Inpection ReportDocument7 pagesBluskies Engineering PVT LTD: Acp Panel Inpection ReportRavi Shankar KolluruNo ratings yet
- TASK 1 Physics Class XI: (Do Always Any Five Numerical Problems Related To The Chapter)Document3 pagesTASK 1 Physics Class XI: (Do Always Any Five Numerical Problems Related To The Chapter)frank 101No ratings yet
- JETL industrial wastewater treatment reportDocument6 pagesJETL industrial wastewater treatment reportPremKumarNo ratings yet