You might also like
- Lect 3 EmbeddeDocument96 pagesLect 3 EmbeddeEyob eyasuNo ratings yet
- PIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byDocument7 pagesPIC (Peripheral Interface Controller) PIC Is A Family of Harvard Architecture Microcontrollers Made byNeeraj KarnaniNo ratings yet
- Embedded System LEC #04: © Dr. Ahmed MahrousDocument24 pagesEmbedded System LEC #04: © Dr. Ahmed MahrousThafer MajeedNo ratings yet
- Micro-Controller 1. Pic Controller Pin DiagramDocument8 pagesMicro-Controller 1. Pic Controller Pin DiagramAyachitula Sharath KumarNo ratings yet
- Understanding & Programming The PIC16C84: A Beginners' Tutorial Jim BrownDocument35 pagesUnderstanding & Programming The PIC16C84: A Beginners' Tutorial Jim BrownCornelius CampbellNo ratings yet
- Explain The Differences Between The Following: A) RISC and CISC Processors B) Harvard and Von-Neumann ArchitecturesDocument45 pagesExplain The Differences Between The Following: A) RISC and CISC Processors B) Harvard and Von-Neumann ArchitecturesShashank M ChanmalNo ratings yet
- Study of PIC16F877A Microcontroller FeaturesDocument7 pagesStudy of PIC16F877A Microcontroller FeaturesPriyadharshini TNo ratings yet
- PIC microcontroller family overviewDocument27 pagesPIC microcontroller family overviewTol Man Shrestha100% (1)
- Pic Programming TutorialDocument18 pagesPic Programming TutorialKerem AktuğNo ratings yet
- PIC MicrocontrollerDocument21 pagesPIC Microcontrollerdoddo16100% (2)
- 3 Instruction ForthDocument6 pages3 Instruction Forthiret retiNo ratings yet
- What Is Microcontroller?Document119 pagesWhat Is Microcontroller?Vishal Gudla NagrajNo ratings yet
- 8051Document69 pages8051Raffi SkNo ratings yet
- PIC Practical Project0470694610Document54 pagesPIC Practical Project0470694610Alex MassNo ratings yet
- IntroductionDocument32 pagesIntroductionpoonamshallyNo ratings yet
- Build A PIC Beacon Clock Pt1Document7 pagesBuild A PIC Beacon Clock Pt1RastekHI100% (2)
- On Chip Periperals tm4c UNIT-IIDocument30 pagesOn Chip Periperals tm4c UNIT-IIK JahnaviNo ratings yet
- EE6008 Notes RejinpaulDocument234 pagesEE6008 Notes RejinpaulB.S. Mothika sriNo ratings yet
- 5 PIC16F887 MicrocontrollerDocument40 pages5 PIC16F887 MicrocontrollerBalakumara Vigneshwaran100% (4)
- It64 Embedded Systems: Marthandam College of Engineering and TechnologyDocument18 pagesIt64 Embedded Systems: Marthandam College of Engineering and TechnologyJoshua DuffyNo ratings yet
- Microcontrollers Applications Solved Questions AnswersDocument60 pagesMicrocontrollers Applications Solved Questions AnswersThe walkerNo ratings yet
- Microcontrollers Cheat SheetDocument32 pagesMicrocontrollers Cheat SheetAditya100% (1)
- Pic 23Document15 pagesPic 23girush100% (1)
- Programming PIC Microcontrollers in CDocument126 pagesProgramming PIC Microcontrollers in CShomeswaran Mugunthan100% (3)
- Introduction To Arm ProcessorDocument10 pagesIntroduction To Arm Processorkeerthidhoni100% (1)
- 6 Intel MP ArchitectureDocument5 pages6 Intel MP ArchitectureJohn Brix BalisterosNo ratings yet
- Lecture 17: Designing A Central Processor Unit 1: The ArchitectureDocument6 pagesLecture 17: Designing A Central Processor Unit 1: The ArchitecturerinobiNo ratings yet
- TALKING ELECTRONICS PIC Theory Page 33Document6 pagesTALKING ELECTRONICS PIC Theory Page 33palurdo2No ratings yet
- EE6008 MICROCONTROLLER TITLEDocument12 pagesEE6008 MICROCONTROLLER TITLETakeItEasyDude TIEDNo ratings yet
- PIC 16F877 Microcontroller: Submitted by Anamika Gupta Me Regular (E.C.E)Document44 pagesPIC 16F877 Microcontroller: Submitted by Anamika Gupta Me Regular (E.C.E)Anamika GuptaNo ratings yet
- Operand Storage in The CPUDocument3 pagesOperand Storage in The CPUisaac setabiNo ratings yet
- Implementation of A 16-Bit RISC Processor Using FPGA ProgrammingDocument25 pagesImplementation of A 16-Bit RISC Processor Using FPGA ProgrammingTejashree100% (3)
- PIC18FDocument37 pagesPIC18Fsitizarina78No ratings yet
- 16-Bit RISC PROCESSORDocument16 pages16-Bit RISC PROCESSORCroitoru Adrian100% (1)
- A4 Led Moving Message Display PDFDocument49 pagesA4 Led Moving Message Display PDFBhupati MakupallyNo ratings yet
- MicrocontrollersDocument14 pagesMicrocontrollersanshu4u06100% (1)
- Traffic Light ControlDocument14 pagesTraffic Light ControlsamarthgulatiNo ratings yet
- AssignDocument2 pagesAssignSumit BhattiNo ratings yet
- Computer Orgn 230428 235533Document10 pagesComputer Orgn 230428 235533Arathi SuryaramananNo ratings yet
- Intel MP Architecture & Assembly ProgrammingDocument16 pagesIntel MP Architecture & Assembly ProgrammingDaisuke SSNo ratings yet
- A PIC Microcontroller IntroductionDocument10 pagesA PIC Microcontroller IntroductionMoorthy Manikandan100% (4)
- Bai2 MemoryDocument27 pagesBai2 MemoryDương ThịnhNo ratings yet
- Introduction - Unit I MCDocument35 pagesIntroduction - Unit I MCKirthi RkNo ratings yet
- MicrocontrollersDocument38 pagesMicrocontrollersShashwath kumarNo ratings yet
- Introduction to 8051 Microcontroller ArchitectureDocument31 pagesIntroduction to 8051 Microcontroller ArchitecturenikitaNo ratings yet
- 8085 Microprocessor QuestionsDocument15 pages8085 Microprocessor QuestionsVirendra GuptaNo ratings yet
- CA231-Microprocessors and Its Applications Short AnswersDocument15 pagesCA231-Microprocessors and Its Applications Short Answersapi-3770232100% (3)
- Cpu Design PDFDocument33 pagesCpu Design PDFPauloConstantinoNo ratings yet
- 8051 Microcontroller Part 1Document21 pages8051 Microcontroller Part 1Sardar IrfanullahNo ratings yet
- 8051 TutorialDocument88 pages8051 Tutorialanon-596672100% (1)
- Intel MP ArchitectureDocument6 pagesIntel MP ArchitectureKhae SnPdroNo ratings yet
- ISA and Programming Language LevelsDocument9 pagesISA and Programming Language LevelsAel Xander LorescoNo ratings yet
- PicDocument71 pagesPicSanthosh SachithananthamNo ratings yet
- Unit-Vi Introduction To MicrocontrollersDocument13 pagesUnit-Vi Introduction To MicrocontrollersTechnoGateKhammamNo ratings yet
- SPI Interface TutorialDocument13 pagesSPI Interface TutorialSn Chaugule100% (4)
- Overview of PIC 16F877Document20 pagesOverview of PIC 16F877Santhanu Surendran100% (1)
- ALPHA Script - PresentationDocument13 pagesALPHA Script - PresentationGeorge DelaportasNo ratings yet
- Concept Evolution Foundation - 1.2Document277 pagesConcept Evolution Foundation - 1.2abre1get522175% (4)
- History of Latin Christianity (A)Document570 pagesHistory of Latin Christianity (A)siggalt100% (1)
- Kingsa FD90 Test Report Body Cote - UnlockedDocument35 pagesKingsa FD90 Test Report Body Cote - UnlockedsmartscsNo ratings yet
- History of CologneDocument2 pagesHistory of CologneDaniel RaeNo ratings yet
- Report1 - Study of Structural System in Architecture - Post Lintel - 5,10,15,20,24,29Document81 pagesReport1 - Study of Structural System in Architecture - Post Lintel - 5,10,15,20,24,29নূরুন্নাহার চাঁদনী100% (1)
- Civil Work Specifications for Substations and Staff HousingDocument86 pagesCivil Work Specifications for Substations and Staff HousingephNo ratings yet
- Grundfos EN733 Vs ISO2858Document1 pageGrundfos EN733 Vs ISO2858daniqoNo ratings yet
- Mobileapp Design: Software Engineering: A Practitioner'S Approach, 8/EDocument15 pagesMobileapp Design: Software Engineering: A Practitioner'S Approach, 8/EalbertosalesNo ratings yet
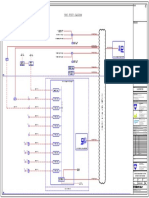
- La Definition: Schematic Riser Diagram Parking Management SystemDocument1 pageLa Definition: Schematic Riser Diagram Parking Management SystemPierre DibNo ratings yet
- Pa - Ead - Cad StandardDocument308 pagesPa - Ead - Cad StandardnickmjrNo ratings yet
- SoftX3000 Technical Manual-System DescriptionDocument115 pagesSoftX3000 Technical Manual-System DescriptionSoma ArunNo ratings yet
- Disk Defrag ReportDocument35 pagesDisk Defrag ReportAsdkjha SadkjasdNo ratings yet
- Aspen HYSYS: Customization GuideDocument364 pagesAspen HYSYS: Customization GuideRoberto CochonNo ratings yet
- Protective Coating for Circuit BoardsDocument3 pagesProtective Coating for Circuit BoardsVikramNo ratings yet
- DETAILING DIMENSIONSDocument5 pagesDETAILING DIMENSIONSCamille Ariel100% (1)
- SAP Cloud for Customer Development OverviewDocument37 pagesSAP Cloud for Customer Development OverviewAnonymous JJdVR5ZoYNo ratings yet
- Cisco UBR7200 Series Software Configuration GuideDocument324 pagesCisco UBR7200 Series Software Configuration GuideMiki RubirozaNo ratings yet
- STN 0, Ipinterface Int - S1 Primaryip - Address 10.246.43.37 !siu - Ip Default Gateway - S1 X2!Document16 pagesSTN 0, Ipinterface Int - S1 Primaryip - Address 10.246.43.37 !siu - Ip Default Gateway - S1 X2!fernando_souza385No ratings yet
- CD 354 Revision 1 Design of Minor Structures-WebDocument64 pagesCD 354 Revision 1 Design of Minor Structures-Webgaurav sharmaNo ratings yet
- Mt. Laurel - 0520 PDFDocument20 pagesMt. Laurel - 0520 PDFelauwitNo ratings yet
- Install and service instructions for Themaclassic combination and system boilersDocument60 pagesInstall and service instructions for Themaclassic combination and system boilersbettyanghelNo ratings yet
- Car Booking Using JavaDocument21 pagesCar Booking Using JavaTechBonker AdiNo ratings yet
- Telit WE866C3 Datasheet-1Document2 pagesTelit WE866C3 Datasheet-1SailajaUngatiNo ratings yet
- Venkatarao Lella ResumeDocument2 pagesVenkatarao Lella ResumeSistla567No ratings yet
- Daniel's Resume 7.2018Document2 pagesDaniel's Resume 7.2018Anonymous C7U9203qzSNo ratings yet
- The Deep Mixing Method Kitazume PDFDocument429 pagesThe Deep Mixing Method Kitazume PDFphotonNo ratings yet
- S4HANA IT L1 v8Document23 pagesS4HANA IT L1 v8rajankthomasNo ratings yet
- Cutting PropagationDocument31 pagesCutting PropagationDrRuby Ranjan SharmaNo ratings yet
- Communication and Converged NetworksDocument48 pagesCommunication and Converged NetworksAfif IlhamsyahNo ratings yet