You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Slab On Grade (Sizing) - Zamil PDFDocument1 pageSlab On Grade (Sizing) - Zamil PDFchidsalazarNo ratings yet
- ADAMS/Solver Subroutines: Overview and ExamplesDocument13 pagesADAMS/Solver Subroutines: Overview and Examplessubit0% (1)
- Final PPT BpoDocument21 pagesFinal PPT BpoPradeepNo ratings yet
- Student: Mitsuki Jimena Mamani Laquita Intermediate IIDocument7 pagesStudent: Mitsuki Jimena Mamani Laquita Intermediate IIMamaniJimenaNo ratings yet
- 0 Delphi Labs DataSnap XE CallbacksDocument7 pages0 Delphi Labs DataSnap XE Callbacksduna tarimaNo ratings yet
- My Media Kit AllDocument10 pagesMy Media Kit Allapi-4725615No ratings yet
- ACM+System+ (Active+Control+Engine+Mount) Odisey 2016Document2 pagesACM+System+ (Active+Control+Engine+Mount) Odisey 2016Wilder M. LopezNo ratings yet
- Ciscenje Hadnjaka HyundaiDocument4 pagesCiscenje Hadnjaka HyundaiAjdin Herc AhmetovicNo ratings yet
- C11 Valves and InjDocument7 pagesC11 Valves and Injraymon1191No ratings yet
- Conference Phone Peoplelink Quadro With Extension MicrophonesDocument3 pagesConference Phone Peoplelink Quadro With Extension MicrophonessanjuktNo ratings yet
- 38 69 3 PBDocument23 pages38 69 3 PBIdethzNo ratings yet
- IOM Fire Pump & ControllerDocument123 pagesIOM Fire Pump & ControllerPrasanth foustin pereiraNo ratings yet
- Hands On PythonDocument240 pagesHands On PythonAmol MunaseNo ratings yet
- Water Overflow Rage and Bubble Surface Area Flux in FlotationDocument105 pagesWater Overflow Rage and Bubble Surface Area Flux in FlotationRolando QuispeNo ratings yet
- CT ratio error calculations and limitsDocument4 pagesCT ratio error calculations and limitsKamal NorlieNo ratings yet
- SS CatalogueDocument6 pagesSS Catalogueahmadgce04No ratings yet
- LCR MeterDocument1 pageLCR MeterLinux lnxNo ratings yet
- WindowsITPro Magazine 2013-05Document88 pagesWindowsITPro Magazine 2013-05kflimNo ratings yet
- Instrument TubingDocument11 pagesInstrument Tubingbab_ooNo ratings yet
- The Poem of The Man God Vol 2 by Maria ValtortaDocument8 pagesThe Poem of The Man God Vol 2 by Maria ValtortaOtieno SteveNo ratings yet
- Resistance in The Fluid System PDFDocument21 pagesResistance in The Fluid System PDFDyo MandeNo ratings yet
- Asme-Bpvc Sec IV Int Vol 57Document6 pagesAsme-Bpvc Sec IV Int Vol 57mostafa aliNo ratings yet
- Engineer'S Stamp: Contractor'S Stamp:: Al Qunfudhah New City Feeder Water Transmission SystemDocument7 pagesEngineer'S Stamp: Contractor'S Stamp:: Al Qunfudhah New City Feeder Water Transmission SystemLouis ClarkNo ratings yet
- SF - Domestic Water PipingDocument16 pagesSF - Domestic Water PipingJahat AtencioNo ratings yet
- Book Review Template BaruDocument3 pagesBook Review Template BaruxvaderNo ratings yet
- Enable Android Auto on Renault Zoe Rlink 1 SystemDocument14 pagesEnable Android Auto on Renault Zoe Rlink 1 SystemPablo PintoNo ratings yet
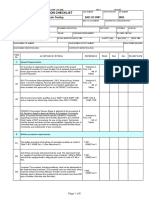
- ARAMCO UT Inspection Checklist - SAIC-UT-2001Document6 pagesARAMCO UT Inspection Checklist - SAIC-UT-2001Anonymous hBBam1n100% (1)
- GAC-12-VX-RMH-LAH-008 - Attachments - 1 To 7Document14 pagesGAC-12-VX-RMH-LAH-008 - Attachments - 1 To 7Dipayan DasNo ratings yet
- Userspace Drivers in LinuxDocument4 pagesUserspace Drivers in LinuxJeffi Edward100% (1)
- 1cjcds3j1 316290Document155 pages1cjcds3j1 316290taurusNo ratings yet