You might also like
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Clean Fleet ToolkitDocument21 pagesClean Fleet ToolkitFleetForumNo ratings yet
- Control SystemsDocument8 pagesControl Systemsmohammed zaidNo ratings yet
- Transfer Function and Block Diagram of Control System Transfer FunctionDocument8 pagesTransfer Function and Block Diagram of Control System Transfer Functionabbasmiry83No ratings yet
- Control SystemsDocument32 pagesControl Systemsselvi0412100% (1)
- Lab - 06 56Document23 pagesLab - 06 56MEEN201101056 KFUEITNo ratings yet
- Transfer Functions From Block Diagrams and Signal Flow ChartDocument10 pagesTransfer Functions From Block Diagrams and Signal Flow ChartYzza Veah EsquivelNo ratings yet
- MSD2Document47 pagesMSD2moeNo ratings yet
- Transfer Function & Block Diagram Algebra: M. Azharul Haque Dept. of EEE PAUDocument69 pagesTransfer Function & Block Diagram Algebra: M. Azharul Haque Dept. of EEE PAUShazidNo ratings yet
- Transfer Functions and Block Diagrams PDFDocument21 pagesTransfer Functions and Block Diagrams PDFJuliana NepembeNo ratings yet
- Slide 2Document89 pagesSlide 2EnesVSNo ratings yet
- Lecture 1Document13 pagesLecture 1Syed Hussain Akbar MosviNo ratings yet
- Math 3Document16 pagesMath 3Anonymous UrzdtCB0INo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- Application of Laplace Analysis To ControlDocument20 pagesApplication of Laplace Analysis To ControlRiki SaputraNo ratings yet
- Unit 2: Transfer Function: PrefaceDocument9 pagesUnit 2: Transfer Function: PrefaceNeans PlanterasNo ratings yet
- AE6505 Control EngineeringDocument9 pagesAE6505 Control Engineeringsathesh waranNo ratings yet
- EEN 407 Sample QuestionsDocument41 pagesEEN 407 Sample QuestionsAbu SiddiqueNo ratings yet
- Summary of Topic Covered in ECE408Document89 pagesSummary of Topic Covered in ECE408Nishikata ManipolNo ratings yet
- HET312 NotesDocument41 pagesHET312 NotesTing SamuelNo ratings yet
- Modul 1 Lab KendaliDocument31 pagesModul 1 Lab KendaliSyukran0% (1)
- Block Diagrams - Lecture NotesDocument8 pagesBlock Diagrams - Lecture NotesMichael HsiaoNo ratings yet
- Mathematical ModellingDocument36 pagesMathematical ModellingMohd Fazli100% (2)
- Feedback Control Systems: Figure 8.1 A Transfer Function ExampleDocument2 pagesFeedback Control Systems: Figure 8.1 A Transfer Function Examplerao abdul hannanNo ratings yet
- 58077-13950-IC1251 IV Sem Control System 2-MARKSDocument15 pages58077-13950-IC1251 IV Sem Control System 2-MARKSMarilyn PrascillaNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- LG Embedded Jan09Document5 pagesLG Embedded Jan09Junaid AhmadNo ratings yet
- Control System 2MARKSDocument16 pagesControl System 2MARKSSeekay Alais Karuppaiah CNo ratings yet
- CS Two MarksDocument7 pagesCS Two MarkssivaeinfoNo ratings yet
- Control System Engineering 2 MarksDocument18 pagesControl System Engineering 2 MarksSeenu CnuNo ratings yet
- Dept of Aero: Unit I-Introduction PART - A (2 Marks)Document9 pagesDept of Aero: Unit I-Introduction PART - A (2 Marks)DeepakLingamoorthyNo ratings yet
- Reviewer ControlDocument10 pagesReviewer ControlDioyo, ArvieNo ratings yet
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- Control Engineering Instructional Module LecturesDocument13 pagesControl Engineering Instructional Module LecturesJohn Kenneth Santiago PaulinoNo ratings yet
- Transient and Steady-State Response Analyses: TR SsDocument4 pagesTransient and Steady-State Response Analyses: TR SsmornyNo ratings yet
- Control Systems MCQDocument27 pagesControl Systems MCQnongdambaNo ratings yet
- PidDocument2 pagesPidOwais KamalNo ratings yet
- Unit 7 and 8Document32 pagesUnit 7 and 8Alton S H ChenNo ratings yet
- Control System NotesDocument127 pagesControl System NotesYash MathuriaNo ratings yet
- BlockDiagram and Signal Flow GraphsDocument29 pagesBlockDiagram and Signal Flow GraphsDienies TorresNo ratings yet
- Cs-Module 1 NotesDocument58 pagesCs-Module 1 NotesSuprithaNo ratings yet
- Lec 3Document8 pagesLec 3students answerNo ratings yet
- Linear Control Engineering QBDocument11 pagesLinear Control Engineering QBAkizuki TakaoNo ratings yet
- Control System QBDocument29 pagesControl System QBPrabhavathi AadhiNo ratings yet
- 6EC5 Control SystemUnit 1 Notes Updated Upto 10122012 - Shilpi LavaniaDocument23 pages6EC5 Control SystemUnit 1 Notes Updated Upto 10122012 - Shilpi LavaniaSona LavaniaNo ratings yet
- Modern Control SystemDocument72 pagesModern Control SystemBewnet GetachewNo ratings yet
- Transfer FunctionDocument26 pagesTransfer FunctionRacheal KirbyNo ratings yet
- Unit 5 - Instrumentation and ControlDocument12 pagesUnit 5 - Instrumentation and ControlKalakriti IITINo ratings yet
- Motor Modeling and Position Control Lab Week 3: Closed Loop ControlDocument14 pagesMotor Modeling and Position Control Lab Week 3: Closed Loop ControlJanett TrujilloNo ratings yet
- CS AnsDocument8 pagesCS Anssubham subhashisNo ratings yet
- Chapter 2 Mathematical Modeling of Dynamic SystemDocument56 pagesChapter 2 Mathematical Modeling of Dynamic SystemAmanuel AsfawNo ratings yet
- 100 CSE 2 MarksDocument10 pages100 CSE 2 MarksdhanarajNo ratings yet
- Mathematical Models of SystemsDocument45 pagesMathematical Models of SystemsSaid Ahmed AliNo ratings yet
- Feedback Control SystemDocument40 pagesFeedback Control SystemMuhammad SaeedNo ratings yet
- Transfer FunctionsDocument10 pagesTransfer Functionssaidu70No ratings yet
- Modelagem Diagrama de BlocsoDocument12 pagesModelagem Diagrama de BlocsoAlessandro BraatzNo ratings yet
- Nonlinear Control Feedback Linearization Sliding Mode ControlFrom EverandNonlinear Control Feedback Linearization Sliding Mode ControlNo ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- Design and Implementation of Various MPPT Algorithms For Solar Charge Controller To Improve The Efficiency Using PSIMDocument54 pagesDesign and Implementation of Various MPPT Algorithms For Solar Charge Controller To Improve The Efficiency Using PSIMaarumugam_rajendran100% (6)
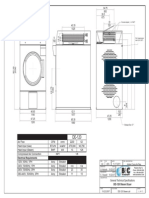
- DE 120 Steam Commercial Dryer General Specifications PDFDocument1 pageDE 120 Steam Commercial Dryer General Specifications PDFAl AdcockNo ratings yet
- DMU ENGT5053 Assignment B Project Initiation Document v1.2Document17 pagesDMU ENGT5053 Assignment B Project Initiation Document v1.2Hinna KhanNo ratings yet
- Relays Effect Statcom - Static Synchronous CompensatorDocument120 pagesRelays Effect Statcom - Static Synchronous Compensatorraghuperumalla100% (7)
- Goldwind 15MW Product Brochure 2013Document4 pagesGoldwind 15MW Product Brochure 2013diegoxis24No ratings yet
- SG3400 3125 2500HV-20 DatasheetDocument1 pageSG3400 3125 2500HV-20 DatasheetPhani ArvapalliNo ratings yet
- A Novel Power System of ENLIL Turbine For Optimal Energy GenerationDocument6 pagesA Novel Power System of ENLIL Turbine For Optimal Energy Generationnayenzaman6No ratings yet
- LNT Exora - FDP - CatalougeDocument36 pagesLNT Exora - FDP - CatalougeShamiun Shafi RatulNo ratings yet
- Hygrogen As A Fuel?Document46 pagesHygrogen As A Fuel?Sarin Tuladhar100% (1)
- Recognizing Transitions or Signal WordsDocument12 pagesRecognizing Transitions or Signal WordsLeah Mae PinoteNo ratings yet
- Algae Bead Lab 2023Document4 pagesAlgae Bead Lab 2023api-711256385No ratings yet
- MAHATRANSCO - Approved Vendor List (For Lines & Substation) As On 01 - 12 - 2022Document25 pagesMAHATRANSCO - Approved Vendor List (For Lines & Substation) As On 01 - 12 - 2022jitendra prasadNo ratings yet
- Motor m42sp 6k eDocument1 pageMotor m42sp 6k eعبد القادر زيدوNo ratings yet
- 3VT17082DA360AA0 Datasheet enDocument8 pages3VT17082DA360AA0 Datasheet enGeorge Romero Carvalho NunesNo ratings yet
- EOD LogsheetDocument30 pagesEOD LogsheetAzam1997No ratings yet
- Science Contextualized LessonsDocument40 pagesScience Contextualized LessonsJenefer TionganNo ratings yet
- V B GuptaDocument24 pagesV B Guptaapi-3733260No ratings yet
- Ayush Sharma Miniproject Sem 1Document16 pagesAyush Sharma Miniproject Sem 1Ayush SharmaNo ratings yet
- Basics OF Mechanical Engineering Laboratory: Practical ManualDocument7 pagesBasics OF Mechanical Engineering Laboratory: Practical ManualRyan TogononNo ratings yet
- Basic Electrical Engineering - Eee-101Document2 pagesBasic Electrical Engineering - Eee-101kohli kingNo ratings yet
- Vol 2 of 2 (Package-02) PDFDocument394 pagesVol 2 of 2 (Package-02) PDFBidhuNo ratings yet
- RA1800 Sub. Data Sheet Rev 1Document3 pagesRA1800 Sub. Data Sheet Rev 1Dr. Newland Gudu KomlaNo ratings yet
- Energy-Efficient Kiln Walls: Previous PageDocument4 pagesEnergy-Efficient Kiln Walls: Previous PageMartin Jesus Gonzalez AguirreNo ratings yet
- The Power Production Performance Evaluation of Blade and Bladeless WindmillDocument9 pagesThe Power Production Performance Evaluation of Blade and Bladeless WindmillftahNo ratings yet
- Technical Guide: Category: Arc Flash Subcategory: Load/Line SideDocument5 pagesTechnical Guide: Category: Arc Flash Subcategory: Load/Line SideEmmanuel EntzanaNo ratings yet
- Office of The Chief Engineer (Testing) : (A Govt. of Maharashtra Undertaking) CIN: U40109MH2005SGC153645Document2 pagesOffice of The Chief Engineer (Testing) : (A Govt. of Maharashtra Undertaking) CIN: U40109MH2005SGC153645Er. Ajit SolankeNo ratings yet
- 2011ARDocument72 pages2011ARMika AurelioNo ratings yet
- Theoretical CyclesDocument56 pagesTheoretical CyclesADOBONo ratings yet
- I C Engine-ProblemsDocument25 pagesI C Engine-Problemsgajendra yadavNo ratings yet