You might also like
- Principles of Geotechnical Engineering, SI Edition 9th Edition by Braja M. Das, Khaled Sobhan Solution ManualDocument14 pagesPrinciples of Geotechnical Engineering, SI Edition 9th Edition by Braja M. Das, Khaled Sobhan Solution ManualJehan Pahlevi100% (1)
- Exercise 8 Full ReportDocument41 pagesExercise 8 Full ReportPrincess Requiso100% (2)
- Analysis of Stress Distribution Around Pin Loaded Holes in Orthotropic PlatesDocument6 pagesAnalysis of Stress Distribution Around Pin Loaded Holes in Orthotropic Plateskhudhayer1970No ratings yet
- J R Rice - Path Independentt Integral - JAM68Document8 pagesJ R Rice - Path Independentt Integral - JAM68CJCONSTANTENo ratings yet
- Strength of Materials - Torsion of Circular Cross Section - Hani Aziz AmeenDocument31 pagesStrength of Materials - Torsion of Circular Cross Section - Hani Aziz AmeenHani Aziz Ameen80% (15)
- The Problem of ConsciousnessDocument5 pagesThe Problem of ConsciousnessAvirukt MittalNo ratings yet
- Comprehensive List of Heat Transfer Fluids and PropertiesDocument3 pagesComprehensive List of Heat Transfer Fluids and PropertiesChris SmithNo ratings yet
- A Study On Cohesive Zone ModelDocument19 pagesA Study On Cohesive Zone ModelabishayNo ratings yet
- Camera CalibrationDocument39 pagesCamera CalibrationyokeshNo ratings yet
- Subsea PLEM & PLET - Theory & Application PDFDocument127 pagesSubsea PLEM & PLET - Theory & Application PDFPaolo BertolliNo ratings yet
- Tappi 550Document8 pagesTappi 550Alberto Koji TakakuraNo ratings yet
- Engineering Analysis With Boundary Elements: J. Purbolaksono, M.H. AliabadiDocument5 pagesEngineering Analysis With Boundary Elements: J. Purbolaksono, M.H. AliabadirafighNo ratings yet
- The Line Spring Model For Surface FlawsDocument17 pagesThe Line Spring Model For Surface FlawsTashi MalhotraNo ratings yet
- Stabbing Line SegmentDocument8 pagesStabbing Line SegmentsanjibNo ratings yet
- Application of Theorem of Minimum Potential Energy To A Complex Structure Part II: Three-Dimensional AnalysisDocument29 pagesApplication of Theorem of Minimum Potential Energy To A Complex Structure Part II: Three-Dimensional AnalysisbenyfirstNo ratings yet
- Free Vibration of Rectangular Plates: Exact Solutions and Ritz AnalysisDocument37 pagesFree Vibration of Rectangular Plates: Exact Solutions and Ritz Analysisallentvm100% (1)
- 3D Dual BEM - CisilinoDocument10 pages3D Dual BEM - CisilinoJhon19806No ratings yet
- Fast Matlab Based Finite Element Solver For The Problem of Bending of Mindlin PlatesDocument14 pagesFast Matlab Based Finite Element Solver For The Problem of Bending of Mindlin Plates帅华蒋No ratings yet
- Analysis of Composite Laminate Beams Using Coupling Cross-Section Finite Element MethodDocument10 pagesAnalysis of Composite Laminate Beams Using Coupling Cross-Section Finite Element MethodHossam T BadranNo ratings yet
- E.L. Starostin and G.H.M. Van Der Heijden - The Shape of A Mobius StripDocument5 pagesE.L. Starostin and G.H.M. Van Der Heijden - The Shape of A Mobius StripYlpkasoNo ratings yet
- Boundary Spectral Strip For Geometries With Arbitrary CurvatureDocument10 pagesBoundary Spectral Strip For Geometries With Arbitrary CurvatureLata DeshmukhNo ratings yet
- 4355 19761 1 PB - 2 PDFDocument12 pages4355 19761 1 PB - 2 PDFNavneet SinghNo ratings yet
- Analysis of Free Edge Effects in Composite LaminatesDocument15 pagesAnalysis of Free Edge Effects in Composite LaminatesSantiago MolinaNo ratings yet
- Meyer 2003Document23 pagesMeyer 2003Mohd Suhail RizviNo ratings yet
- 1 s2.0 0266352X9090001C MainDocument23 pages1 s2.0 0266352X9090001C MainabdeeNo ratings yet
- Electronic States in A Quantum Lens: Arezky H. Rodr Iguez, C. Trallero-Giner, S.E. Ulloa and J. Mar In-Antu NaDocument18 pagesElectronic States in A Quantum Lens: Arezky H. Rodr Iguez, C. Trallero-Giner, S.E. Ulloa and J. Mar In-Antu NaCarlos EduardoNo ratings yet
- Analysis of Thick Functionally Graded Plates by Local Integral Equation MethodDocument22 pagesAnalysis of Thick Functionally Graded Plates by Local Integral Equation MethodAnkur KurmiNo ratings yet
- Boundary Element Analysis of Cracked Shear PlatesDocument6 pagesBoundary Element Analysis of Cracked Shear PlatesThangNo ratings yet
- 1978 - Jelínek-Kropáček1978 Article StatisticalProcessingOfAnisotrDocument13 pages1978 - Jelínek-Kropáček1978 Article StatisticalProcessingOfAnisotrluis velderrain RojasNo ratings yet
- Keat 1988Document19 pagesKeat 1988I Made WiragunarsaNo ratings yet
- Finite Element Modelling of Rock Socketed PilesDocument23 pagesFinite Element Modelling of Rock Socketed PilestavialimNo ratings yet
- CM Sapo 2003Document12 pagesCM Sapo 2003Ronald Cario SeguinNo ratings yet
- Exact Solutions For The Buckling of Rectangular Plates Having Linearly Varying In-Plane Loading On Two Opposite Simply Supported EdgesDocument19 pagesExact Solutions For The Buckling of Rectangular Plates Having Linearly Varying In-Plane Loading On Two Opposite Simply Supported EdgesskorabnNo ratings yet
- Analysis of Skew Plate Using FSDTDocument7 pagesAnalysis of Skew Plate Using FSDTInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 1 Modeling Crack Singularities in FEM/X-FEMDocument11 pages1 Modeling Crack Singularities in FEM/X-FEMmilad66tehNo ratings yet
- Tachyon-Like Spectrum of Electromagnetic Modes in The Case of Extremely Low Frequencies in A System of Nanopores (V. Sergentu, M. Olednic)Document3 pagesTachyon-Like Spectrum of Electromagnetic Modes in The Case of Extremely Low Frequencies in A System of Nanopores (V. Sergentu, M. Olednic)Marin ØlednikNo ratings yet
- Ms 2005 230Document7 pagesMs 2005 230Fernando WagnerNo ratings yet
- Analysis of Order of Singularity at A Vertex in 3D Transversely Isotropic Piezoelectric Single-Step Bonded JointsDocument13 pagesAnalysis of Order of Singularity at A Vertex in 3D Transversely Isotropic Piezoelectric Single-Step Bonded JointsAJER JOURNALNo ratings yet
- Asymptotic Derivation of A General Linear Model For Thin-Walled Elastic RodsDocument35 pagesAsymptotic Derivation of A General Linear Model For Thin-Walled Elastic RodsPaula AndreaNo ratings yet
- Semi-Analytical Solution of 2-D Elasticity Problems by The Strip Distributed Transfer Function MethodDocument23 pagesSemi-Analytical Solution of 2-D Elasticity Problems by The Strip Distributed Transfer Function MethodGabriel SaavedraNo ratings yet
- Clamp PDFDocument12 pagesClamp PDFNeneNo ratings yet
- Applied Mathematical Modelling: Mario F. Letelier, Dennis A. Siginer, Amaru GonzálezDocument9 pagesApplied Mathematical Modelling: Mario F. Letelier, Dennis A. Siginer, Amaru GonzálezManikiranSaiNo ratings yet
- Parametric Study of Flexibility Factor For Curved Pipe and Welding ElbowsDocument9 pagesParametric Study of Flexibility Factor For Curved Pipe and Welding Elbowsbam_1962No ratings yet
- Submerged Laminar Jet Impingement On A PlaneDocument24 pagesSubmerged Laminar Jet Impingement On A PlaneAENo ratings yet
- International Journal of Heat and Fluid Flow: M. Meyer, S. Hickel, N.A. AdamsDocument10 pagesInternational Journal of Heat and Fluid Flow: M. Meyer, S. Hickel, N.A. AdamsManu ChakkingalNo ratings yet
- Spin-orbit splittings in Si/SiGe quantum wells from ideal to realisticDocument19 pagesSpin-orbit splittings in Si/SiGe quantum wells from ideal to realisticAlfredo Aguilar CastilloNo ratings yet
- Bending Response of FGM Plate Under Sinusoidal Line Load.Document9 pagesBending Response of FGM Plate Under Sinusoidal Line Load.International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Investigation of Dynamic Displacements of Lithographic Press Rubber Roller by Time Average Geometric MoireDocument12 pagesInvestigation of Dynamic Displacements of Lithographic Press Rubber Roller by Time Average Geometric Moirecharles_boyle_3No ratings yet
- Shi, G. and Bezine, G. 1988. A General Boundary Integral Formulation For The Anisotropic Plate Bending Problems.Document23 pagesShi, G. and Bezine, G. 1988. A General Boundary Integral Formulation For The Anisotropic Plate Bending Problems.Leonardo BernardoNo ratings yet
- Application of Physical and Mathematical Modelling in Underground ExcavationsDocument8 pagesApplication of Physical and Mathematical Modelling in Underground ExcavationsrannscribdNo ratings yet
- On The Nonlinear Elastic Properties of Textile Reinforced Concrete Under Tensile Loading Including Damage and CrackingDocument7 pagesOn The Nonlinear Elastic Properties of Textile Reinforced Concrete Under Tensile Loading Including Damage and Crackingal_frdNo ratings yet
- Nitin Eng Journal PDFDocument16 pagesNitin Eng Journal PDFpdhurveyNo ratings yet
- With.: Stress-Concentration Factors For Finite. .Orthotropic Laminates A Pin-LoadedDocument44 pagesWith.: Stress-Concentration Factors For Finite. .Orthotropic Laminates A Pin-LoadedTanu RdNo ratings yet
- 152 1199 2 PB PDFDocument16 pages152 1199 2 PB PDFRohit GadekarNo ratings yet
- Nonlinear Critical Layers in The Boundary Layer On A Rotating DiskDocument13 pagesNonlinear Critical Layers in The Boundary Layer On A Rotating Diskd882011No ratings yet
- A Solid Beam Element For Wire Rope Simulation With A Special Contact AlgorithmDocument2 pagesA Solid Beam Element For Wire Rope Simulation With A Special Contact AlgorithmMarkoNo ratings yet
- Needleman 1990Document20 pagesNeedleman 1990إحسان خالد جودة الشحات ٣٥٧٣No ratings yet
- Alternating Method Applied To Analyse Mode-III Fracture Problems With Multiple Cracks in An Infinite DomainDocument11 pagesAlternating Method Applied To Analyse Mode-III Fracture Problems With Multiple Cracks in An Infinite DomainNguyen Ba DungNo ratings yet
- VS LA GeocongressDocument9 pagesVS LA GeocongressHari Dwi WahyudiNo ratings yet
- Quantitative Interpretation of VES: MethodDocument7 pagesQuantitative Interpretation of VES: MethodRenatus RichardNo ratings yet
- TM_53Document40 pagesTM_53zlazarevicNo ratings yet
- Dao động tự do của thành mỏng ko đối xứngDocument18 pagesDao động tự do của thành mỏng ko đối xứngThái Âu CôngNo ratings yet
- A Simplified Method For Natural Frequency Analysis of A Multiple Cracked Beam 2001 Journal of Sound and VibrationDocument15 pagesA Simplified Method For Natural Frequency Analysis of A Multiple Cracked Beam 2001 Journal of Sound and VibrationABHISHEK KUMAR SAHUNo ratings yet
- (1972) Plastic Analysis of Castellated Beams-I-Interaction of Moment, Shear and Axial ForceDocument31 pages(1972) Plastic Analysis of Castellated Beams-I-Interaction of Moment, Shear and Axial ForcemikarceNo ratings yet
- A Class of Mixed Assumed Strain Methods and The Method of IncompatibleDocument45 pagesA Class of Mixed Assumed Strain Methods and The Method of IncompatibleQiyuan ZhouNo ratings yet
- Eshelby Tensors and Overall Properties of Nano-Composites Considering Both Interface Stretching and Bending EffectsDocument34 pagesEshelby Tensors and Overall Properties of Nano-Composites Considering Both Interface Stretching and Bending EffectsM Mohsin RazaNo ratings yet
- Geometry of Surfaces: A Practical Guide for Mechanical EngineersFrom EverandGeometry of Surfaces: A Practical Guide for Mechanical EngineersNo ratings yet
- Solutions To Mathematics 17 Exercises On Systems of Equations PDFDocument6 pagesSolutions To Mathematics 17 Exercises On Systems of Equations PDFMichael Christian BaysauliNo ratings yet
- BAM: Enumeration of Escherichia Coli and The Coliform BacteriaDocument8 pagesBAM: Enumeration of Escherichia Coli and The Coliform BacteriatintfenNo ratings yet
- Concentrations WorksheetDocument3 pagesConcentrations WorksheetMaquisig MasangcayNo ratings yet
- Seismic Actions For Designing Geotechnical Works - Iso23469: Susumu IAIDocument3 pagesSeismic Actions For Designing Geotechnical Works - Iso23469: Susumu IAIrmm99rmm99No ratings yet
- Limit Test of Arsenic and Lead: - Tashi (91901263048)Document17 pagesLimit Test of Arsenic and Lead: - Tashi (91901263048)Tshering Yangzom NamdaNo ratings yet
- Reflectarray AntennaDocument27 pagesReflectarray AntennaVISHNU UNNIKRISHNANNo ratings yet
- Assignment 1Document6 pagesAssignment 1Suru UniiNo ratings yet
- PCA Chapter 15 - Specify, Design, ProportionDocument91 pagesPCA Chapter 15 - Specify, Design, Proportiongreat_triskelionNo ratings yet
- Webers Electrodynamics For Hydrogen AtomDocument8 pagesWebers Electrodynamics For Hydrogen AtomdaveklodavekloNo ratings yet
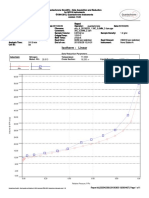
- GraphIsotherm Linear STTN - A - 20150226 - 1 30C - 0,5MM - 3 JamDocument1 pageGraphIsotherm Linear STTN - A - 20150226 - 1 30C - 0,5MM - 3 JamYunus HidayatNo ratings yet
- NPL Testing Demonstrates The Flir Gf320 Meets Epa Ooooa StandardsDocument2 pagesNPL Testing Demonstrates The Flir Gf320 Meets Epa Ooooa StandardsjimmymorelosNo ratings yet
- Basic Concepts: Partial Differential Equations (Pde)Document19 pagesBasic Concepts: Partial Differential Equations (Pde)Aztec MayanNo ratings yet
- TC3 Kinetmatic TransformationDocument122 pagesTC3 Kinetmatic TransformationTruong NguyenNo ratings yet
- Astavarga Tables of JupiterDocument4 pagesAstavarga Tables of JupiterSam SungNo ratings yet
- dm16 RRDocument16 pagesdm16 RRioan dumitrescuNo ratings yet
- Impulse 4.0 Users Guide SI PDFDocument554 pagesImpulse 4.0 Users Guide SI PDFalberto fuentealbaNo ratings yet
- Title Composite Material Data Sheets TabDocument7 pagesTitle Composite Material Data Sheets TabffontanaNo ratings yet
- IwnDocument76 pagesIwnAzizur RahmanNo ratings yet
- Solution Set 3Document11 pagesSolution Set 3HaseebAhmadNo ratings yet
- Critical Chloride Content in ConcreteDocument8 pagesCritical Chloride Content in ConcreteChatchai ManathamsombatNo ratings yet
- GC Validation TCDDocument6 pagesGC Validation TCDRajan Chidambaram SivaNo ratings yet