You might also like
- Control de Un Péndulo de Furuta en Modo GrúaDocument6 pagesControl de Un Péndulo de Furuta en Modo Grúakarlosandres82No ratings yet
- Eter2 U1 A3 EdmsDocument6 pagesEter2 U1 A3 EdmsLalo Marti50% (2)
- Reactor ExotermicoDocument11 pagesReactor ExotermicoSarelys Zavala0% (1)
- Diseño y Construcción de Un Brazo Mecánico de Tres Grados de LibertadDocument7 pagesDiseño y Construcción de Un Brazo Mecánico de Tres Grados de LibertadEly RodriguezNo ratings yet
- Documento 3Document7 pagesDocumento 3DavidNo ratings yet
- Trabajo Dom Sist Cont II 2019-IIDocument16 pagesTrabajo Dom Sist Cont II 2019-IIJair Castillo ZarateNo ratings yet
- Control en Cascada de Reactores Continuos Rtca Exotermicos Con Reaccion Exotermica de Primer Orden ADocument9 pagesControl en Cascada de Reactores Continuos Rtca Exotermicos Con Reaccion Exotermica de Primer Orden AMagalíFlorenciaNo ratings yet
- Informe FinalDocument3 pagesInforme FinalgonzaloNo ratings yet
- Control de Un Reactor CSTRDocument12 pagesControl de Un Reactor CSTRMiguel LennonNo ratings yet
- Balance de Energia Intercambiador de CalorDocument27 pagesBalance de Energia Intercambiador de CalorCliver Santos Yupanqui Machaca100% (3)
- LC Practica 1 1 Equipo XDocument6 pagesLC Practica 1 1 Equipo XSam VslNo ratings yet
- Mecánica Fluidos Unidad 3 Ecuación de BernoulliDocument30 pagesMecánica Fluidos Unidad 3 Ecuación de BernoulliHugo González54% (13)
- Cámara de FermentacionDocument10 pagesCámara de FermentacionEmanuel AmpudiaNo ratings yet
- ProblemasDocument158 pagesProblemasuvagorda1No ratings yet
- Proyecto FinalDocument29 pagesProyecto FinalDavid Alejandro Gómez MejíaNo ratings yet
- Control ProblemasDocument28 pagesControl ProblemasSantiago F.No ratings yet
- Práctica 7 - Martinez - Badillo - MT3EDocument14 pagesPráctica 7 - Martinez - Badillo - MT3ElUISIlloNo ratings yet
- Informe de Balance de Energía MecánicaDocument19 pagesInforme de Balance de Energía MecánicaBrenda KarenNo ratings yet
- Sistemas HibridosDocument10 pagesSistemas HibridosEmmanuel MarinNo ratings yet
- CSTR Model (Spanish Version)Document8 pagesCSTR Model (Spanish Version)Eduardo TusaNo ratings yet
- Examen Parcial 2Document3 pagesExamen Parcial 2Juan Alvarado LujanNo ratings yet
- Tf2281 - em 2020 - p5c - g1 - RevisadoDocument30 pagesTf2281 - em 2020 - p5c - g1 - RevisadoDavidNo ratings yet
- Diseño de Un Banco de Datos de Flujo de Fluidos Biotecnológicos2222Document12 pagesDiseño de Un Banco de Datos de Flujo de Fluidos Biotecnológicos2222Renzo ValeroNo ratings yet
- Proyecto Bomba ArieteDocument30 pagesProyecto Bomba ArieteWilliam QuilicheNo ratings yet
- Sistemas de ProteccionesDocument31 pagesSistemas de ProteccionesPatryckQuimbitaNo ratings yet
- Desarrollo y Control de Un Pendulo de FurutaDocument7 pagesDesarrollo y Control de Un Pendulo de FurutaHugo Junior Quispe ChaconNo ratings yet
- Aplicación de Métodos Numéricos Al Diseño de Valvulas para Motores de Combustion InternaDocument27 pagesAplicación de Métodos Numéricos Al Diseño de Valvulas para Motores de Combustion InternaFerNandoNo ratings yet
- Practica41 PDFDocument12 pagesPractica41 PDFhamfrostNo ratings yet
- Tanques CSTRDocument26 pagesTanques CSTRAnitaEriraAzaNo ratings yet
- Modelado de Un Reactor CSTRDocument16 pagesModelado de Un Reactor CSTRMay CCNo ratings yet
- Modelado y Análisis de Sistema de Control de ElevadorDocument11 pagesModelado y Análisis de Sistema de Control de ElevadorFernando GuiraudNo ratings yet
- Sistemas de Control MecanicosDocument30 pagesSistemas de Control MecanicosCIELOCINo ratings yet
- Mecanica Fluidos Unidad 3 Ecuacion de Bernoulli 2Document30 pagesMecanica Fluidos Unidad 3 Ecuacion de Bernoulli 2raul inga cirtoNo ratings yet
- Trabajo Final Control TerminalDocument29 pagesTrabajo Final Control TerminalmrvelandiacNo ratings yet
- Tarea1control GF Yp Ge RSDocument9 pagesTarea1control GF Yp Ge RSRosa RomeroNo ratings yet
- Laboratorio de Pérdidas de CargaDocument20 pagesLaboratorio de Pérdidas de CargaDaniel RubioNo ratings yet
- Mecánica Fluidos Unidad 3 Ecuación de BernoulliDocument21 pagesMecánica Fluidos Unidad 3 Ecuación de BernoulliHugo González100% (2)
- Como Sintonizar Un Control Ad or PID Teoria y PracticaDocument32 pagesComo Sintonizar Un Control Ad or PID Teoria y PracticaFrancisco RNo ratings yet
- Laboratorio No. 2Document26 pagesLaboratorio No. 2Ronald Ermis Marca GuzmanNo ratings yet
- Ciclo BraytonDocument12 pagesCiclo Brayton@DamianCCSNo ratings yet
- Catenaria Vs PantografoC 41 Art 39Document12 pagesCatenaria Vs PantografoC 41 Art 39Edu XaviNo ratings yet
- Ensayo Turbina PeltonDocument11 pagesEnsayo Turbina PeltonPato FloresNo ratings yet
- diSciascioPeaKlenzi ModeladoyanlisisdeladinmicadegrasAADECA2000 PDFDocument7 pagesdiSciascioPeaKlenzi ModeladoyanlisisdeladinmicadegrasAADECA2000 PDFAna DelgadoNo ratings yet
- Examen Primer Parcial - II - 10Document2 pagesExamen Primer Parcial - II - 10hector100% (1)
- Control de ExtrusoraDocument3 pagesControl de ExtrusoraJoe González ZavaletaNo ratings yet
- Trabajo 2 - Modelam - Control MRAC - 2020-ADocument19 pagesTrabajo 2 - Modelam - Control MRAC - 2020-AmyoshkeuNo ratings yet
- 21502-21 TECNOLOGÍA DE CONTROL Dinámica de Los Sistemas FísicosDocument34 pages21502-21 TECNOLOGÍA DE CONTROL Dinámica de Los Sistemas FísicosTGANo ratings yet
- ProyectoDocument15 pagesProyectoCarlos CapillaNo ratings yet
- Problema de FenomenosDocument19 pagesProblema de FenomenosKevin CarHerNo ratings yet
- Regulador Del Depósito de Combustible en Antonov An-225 Mriya ModificadoDocument18 pagesRegulador Del Depósito de Combustible en Antonov An-225 Mriya ModificadoAntonio Gómez GuzmánNo ratings yet
- Controlador AsignacPolos ObservadoresDocument12 pagesControlador AsignacPolos ObservadoreshennyNo ratings yet
- Proyecto de CatedraDocument6 pagesProyecto de CatedraRuben Ismael RamosNo ratings yet
- Informe Dilatación TérmicaDocument24 pagesInforme Dilatación TérmicaFrancisco González De Brito100% (2)
- Pre - Práctica 2 - Diseño de SistemasDocument7 pagesPre - Práctica 2 - Diseño de SistemasAlexaNo ratings yet
- Procesos en Fluidos Compresibles PDFDocument19 pagesProcesos en Fluidos Compresibles PDFSofia CabarcasNo ratings yet
- Lab Oratorio 1Document5 pagesLab Oratorio 1Nappa SamaNo ratings yet
- Calculo Instalacion AntenasDocument15 pagesCalculo Instalacion Antenaslucas_martin_3No ratings yet
- Mantenimiento de motores térmicos de dos y cuatro tiempos. TMVG0409From EverandMantenimiento de motores térmicos de dos y cuatro tiempos. TMVG0409Rating: 4 out of 5 stars4/5 (1)
- UF1026 - Caracterización de procesos e instalaciones frigoríficasFrom EverandUF1026 - Caracterización de procesos e instalaciones frigoríficasRating: 4 out of 5 stars4/5 (1)
- Eficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108From EverandEficiencia energética en las instalaciones de calefacción y acs en los edificios. ENAC0108No ratings yet
- Bases Tecnicas Servicio Operacion de ChancadoDocument13 pagesBases Tecnicas Servicio Operacion de ChancadoKhriz KztiyohNo ratings yet
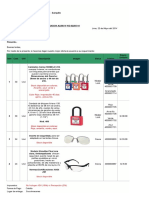
- Cotizacià N Skanska - Candados Lente e Inserto 22 05 2014Document2 pagesCotizacià N Skanska - Candados Lente e Inserto 22 05 2014Khriz KztiyohNo ratings yet
- SoW Servicio Recursos Compartidos para Mantenimiento ConcentradorasDocument84 pagesSoW Servicio Recursos Compartidos para Mantenimiento ConcentradorasKhriz KztiyohNo ratings yet
- Guia para Diagnostico Organizacional Sig PDFDocument4 pagesGuia para Diagnostico Organizacional Sig PDFKhriz KztiyohNo ratings yet
- An Lisis Del Sistema de Transporte P Blico en La Ciudad de HuancayoDocument123 pagesAn Lisis Del Sistema de Transporte P Blico en La Ciudad de HuancayoGREhuancayoNo ratings yet
- Charla de 5 Minutos - Uso Adecuado de HerramientasDocument3 pagesCharla de 5 Minutos - Uso Adecuado de HerramientasKhriz KztiyohNo ratings yet
- Alineadores LaserDocument6 pagesAlineadores LaserKhriz KztiyohNo ratings yet
- Nestlé PerúDocument10 pagesNestlé PerúMiguel Cojal Aguilar50% (2)
- Modelo de Contrato Bajo Sujeto A Modalidad - SuplenciaDocument2 pagesModelo de Contrato Bajo Sujeto A Modalidad - SuplenciaPLINER MORALES RODRIGUEZNo ratings yet
- Fijacion Convenciones ProbatoriasDocument4 pagesFijacion Convenciones ProbatoriasMike CasimiroNo ratings yet
- Algebra Lineal Actividad Semana 01Document5 pagesAlgebra Lineal Actividad Semana 01Dante DeadNo ratings yet
- Informes de LaboresDocument128 pagesInformes de LaboresElcantaroNo ratings yet
- IMPLEMENTAR UN CAMBIO EN EL ACOMPAÑAMIENTO DE AULA Nucleo PedagogicoDocument73 pagesIMPLEMENTAR UN CAMBIO EN EL ACOMPAÑAMIENTO DE AULA Nucleo Pedagogicotanny00No ratings yet
- Acordeon - EstudioDocument3 pagesAcordeon - EstudioIsabel RinconNo ratings yet
- Taller de BarismoDocument6 pagesTaller de BarismoCh YonelyNo ratings yet
- Materia de LiderazgoDocument2 pagesMateria de LiderazgoJOSELYN NIKOL CAISALITIN AYNUCANo ratings yet
- Areas Funcionales (Javier Tito-Jaime Sarco)Document8 pagesAreas Funcionales (Javier Tito-Jaime Sarco)Victor SaireNo ratings yet
- Inmuebles EdomexDocument188 pagesInmuebles EdomexIvánNo ratings yet
- MiembrosdebordeDocument15 pagesMiembrosdebordeRuben Brayan VQNo ratings yet
- Ficha Tecnica MoldesDocument8 pagesFicha Tecnica MoldesgrovertarquiNo ratings yet
- Formato de Proyecto de Tesis UCSM 2015 - Anexo E - ExplicadoDocument3 pagesFormato de Proyecto de Tesis UCSM 2015 - Anexo E - ExplicadoFenit Anonimo100% (1)
- Clasificacion de Las Microempresas en PR (Oct. 2013)Document6 pagesClasificacion de Las Microempresas en PR (Oct. 2013)fsantanamNo ratings yet
- Tarea #2 Sintsis Virus InformaticosDocument8 pagesTarea #2 Sintsis Virus InformaticosMisael CaballeroNo ratings yet
- El DerechoDocument10 pagesEl DerechoLuis InciarteNo ratings yet
- Regulación de Frecuencia y TensiónDocument9 pagesRegulación de Frecuencia y TensiónFelipe CortesNo ratings yet
- Auxiliar en VentasDocument2 pagesAuxiliar en VentasDaniela MendivelsoNo ratings yet
- MOOC Modulo1 AutoliderazgoDocument20 pagesMOOC Modulo1 AutoliderazgowilmerNo ratings yet
- HFW 100 t5 EsDocument13 pagesHFW 100 t5 EsAriel R. Arraya V.No ratings yet
- Repaso Primer Parcial Presupuesto EmpresarialDocument2 pagesRepaso Primer Parcial Presupuesto EmpresarialJulito MorelNo ratings yet
- Tesis AntivirusDocument29 pagesTesis AntivirusEfren Francisco Ruiz RangelNo ratings yet
- Devolucion BilleterasDocument2 pagesDevolucion BilleterasartemioloNo ratings yet
- Extincion Rel. LaboralDocument79 pagesExtincion Rel. LaboralMaria Elena CabreraNo ratings yet
- Pauta de CotejoDocument10 pagesPauta de Cotejovaleria.arqueroNo ratings yet
- Diagnóstico de Conocimientos PreviosDocument3 pagesDiagnóstico de Conocimientos Previosdaniela sepulveda cofreNo ratings yet
- Xvi Copa Taiji Kase Open On Line 2020 - ConvocatoriaDocument7 pagesXvi Copa Taiji Kase Open On Line 2020 - ConvocatoriaRegina GarciaNo ratings yet
- Ensayo Prueba de Transición UniversitariaDocument18 pagesEnsayo Prueba de Transición UniversitariaDaniela VeillonNo ratings yet
- Session 2 Lab BiomecánicaDocument9 pagesSession 2 Lab BiomecánicaDario CaphistNo ratings yet