You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Avionics Magazine - Aerospace Abbreviation GuideDocument25 pagesAvionics Magazine - Aerospace Abbreviation Guidefernandoabel01No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- MANUAL Yaskawa A1000 Manual PDFDocument544 pagesMANUAL Yaskawa A1000 Manual PDFCarlos Chavez Torres83% (6)
- Iuav1922a 06me0092@00b0140Document144 pagesIuav1922a 06me0092@00b0140Birthley RagasaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Microcontroller Projects Digital Voting Using Pic MicrocontrollerDocument3 pagesMicrocontroller Projects Digital Voting Using Pic MicrocontrollerAbdullah Omar NasifNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Solar Mobile ChargerDocument21 pagesSolar Mobile ChargerSourabh BanerjeeNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Manual I-24xW-S PDFDocument120 pagesManual I-24xW-S PDFMario Junior0% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Cylon KNX GatewayDocument4 pagesCylon KNX GatewayJulián HernándezNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- GTU BE EC 6th Sem Syllabus Teaching SchemeDocument10 pagesGTU BE EC 6th Sem Syllabus Teaching SchemeSuket100% (1)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hoja de Datos Diodos ZENER - 1N4728A Hasta 1N4764A - Exp4Document6 pagesHoja de Datos Diodos ZENER - 1N4728A Hasta 1N4764A - Exp4Efra IbacetaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Eaton 9130 DSP Firmware Upgrade Guide 2.543Document11 pagesEaton 9130 DSP Firmware Upgrade Guide 2.543AlejandroNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Discrete Signal Processing Experiment 5 CodeDocument3 pagesDiscrete Signal Processing Experiment 5 CodedeeptakshdNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Good OneDocument94 pagesGood OneVishal PattanshettiNo ratings yet
- Boschrexroth Re29993Document4 pagesBoschrexroth Re29993Service - Anda Hydraulics Asia Pte LtdNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- 704af0d354 Mv790 User GuideDocument10 pages704af0d354 Mv790 User GuideJes TreNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Agriculture Based Saved Wild AnimalsDocument19 pagesAgriculture Based Saved Wild Animalsvenky potlaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- ORBIKDocument96 pagesORBIKNizarNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Crouse Hinds Eic Combination Starter BrochureDocument8 pagesCrouse Hinds Eic Combination Starter Brochurejvaldivia82No ratings yet
- Alien Crosstalk MeasurementsDocument12 pagesAlien Crosstalk MeasurementsCarlos Buznego NiochetNo ratings yet
- XGB - Iec Eng v1.2Document219 pagesXGB - Iec Eng v1.2Jhoni BenderNo ratings yet
- General Specifi Cations: XS770A Wireless Vibration SensorDocument5 pagesGeneral Specifi Cations: XS770A Wireless Vibration SensorTommoNo ratings yet
- VT Catalog PDFDocument11 pagesVT Catalog PDFShreya SharmaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
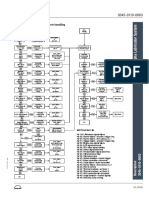
- 63 Sequence Diagram For Alarm HandlingDocument1 page63 Sequence Diagram For Alarm HandlingNick SkiadasNo ratings yet
- III 1 Electrification 1 28Document35 pagesIII 1 Electrification 1 28SannyBombeoJomoc100% (1)
- User Manual 22mt44dp-pzDocument36 pagesUser Manual 22mt44dp-pzVideoHi VizanteaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Bu00a02b02 60e 4Document84 pagesBu00a02b02 60e 4Marcos AldrovandiNo ratings yet
- Input Impedance Modeling and Analysis of Line-Commutated RectifiersDocument9 pagesInput Impedance Modeling and Analysis of Line-Commutated RectifiersWaqar QuredhiNo ratings yet
- 01-15 Check DTC Memory and Erase DTC Memory PDFDocument52 pages01-15 Check DTC Memory and Erase DTC Memory PDFmefisto06cNo ratings yet
- Single-Chip IC: For Home Stereo IC With Electronic Tuning SupportDocument9 pagesSingle-Chip IC: For Home Stereo IC With Electronic Tuning SupportVicenteAlvarezNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- TSD Rev.'9', Jan' 15 CoveringDocument55 pagesTSD Rev.'9', Jan' 15 CoveringLingaraj NaikNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)