You might also like
- 3 DeltaRule PDFDocument10 pages3 DeltaRule PDFKrishnamohanNo ratings yet
- 3 DeltaRule PDFDocument10 pages3 DeltaRule PDFEs ENo ratings yet
- Artificial Neuron: Artificial Neural Network-IIIDocument14 pagesArtificial Neuron: Artificial Neural Network-IIIPIMRANo ratings yet
- Learning Rules of ANNDocument25 pagesLearning Rules of ANNbukyaravindarNo ratings yet
- Chapter-2 Single Feed Forward NetwotkDocument132 pagesChapter-2 Single Feed Forward Netwotkshahdharmil3103No ratings yet
- شبكات عصبية ٢Document6 pagesشبكات عصبية ٢Afkir Al-HusaineNo ratings yet
- Perceptron&ADALINEcodeDocument2 pagesPerceptron&ADALINEcodeKarismo BingNo ratings yet
- 2007 02 01b Janecek PerceptronDocument37 pages2007 02 01b Janecek PerceptronRadenNo ratings yet
- Optimize Lecture on ML Optimization MethodsDocument27 pagesOptimize Lecture on ML Optimization MethodssentryNo ratings yet
- Notes on machine learning techniques and algorithmsDocument10 pagesNotes on machine learning techniques and algorithmsvincentNo ratings yet
- Linear Models (Unit II) Chapter III 1Document24 pagesLinear Models (Unit II) Chapter III 1AnilNo ratings yet
- Back Propagation ALGORITHMDocument11 pagesBack Propagation ALGORITHMMary MorseNo ratings yet
- Lecture2 (4)Document57 pagesLecture2 (4)happy_userNo ratings yet
- Linear Regression with Gradient DescentDocument43 pagesLinear Regression with Gradient DescentTev WallaceNo ratings yet
- Question of The Day: N N N NDocument8 pagesQuestion of The Day: N N N Nswati_jainNo ratings yet
- Lecture 2 MathDocument34 pagesLecture 2 Mathnikola001No ratings yet
- Bound On The Loss of The Widrow-Hoff AlgorithmDocument6 pagesBound On The Loss of The Widrow-Hoff AlgorithmPinrolinvic Liemq ManembuNo ratings yet
- The Problem of OverfittingDocument40 pagesThe Problem of OverfittingSahil KaushishNo ratings yet
- Perceptron TutorialDocument37 pagesPerceptron TutorialJohn CarterNo ratings yet
- Hebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5Document20 pagesHebbian Learning and Gradient Descent Learning: Neural Computation: Lecture 5richaNo ratings yet
- BackpropergationDocument4 pagesBackpropergationParasecNo ratings yet
- Ex Lecture1Document2 pagesEx Lecture1AlNo ratings yet
- Applicable Artificial Intelligence Back Propagation: Academic Session 2022/2023Document20 pagesApplicable Artificial Intelligence Back Propagation: Academic Session 2022/2023muhammed suhailNo ratings yet
- Kevin Swingler - Lecture 4: Multi-Layer PerceptronsDocument20 pagesKevin Swingler - Lecture 4: Multi-Layer PerceptronsRoots999No ratings yet
- 4 Multilayer Perceptrons and Radial Basis FunctionsDocument6 pages4 Multilayer Perceptrons and Radial Basis FunctionsVivekNo ratings yet
- AdalineDocument28 pagesAdalineAnonymous 05P3kMINo ratings yet
- DeepLearning Practice Question AnswersDocument43 pagesDeepLearning Practice Question AnswersPaul GeorgeNo ratings yet
- Crammer, Kulesza, Dredze - 2009 - Adaptive Regularization of Weighted VectorsDocument9 pagesCrammer, Kulesza, Dredze - 2009 - Adaptive Regularization of Weighted VectorsBlack FoxNo ratings yet
- Perceptons Neural NetworksDocument33 pagesPerceptons Neural Networksvasu_koneti5124No ratings yet
- Linear RegressionDocument29 pagesLinear RegressionSreetam GangulyNo ratings yet
- Lesson 6 Integration by PartsDocument10 pagesLesson 6 Integration by PartsBryant ken ReyesNo ratings yet
- Hw3 SolutionsDocument7 pagesHw3 Solutionsmahamd saiedNo ratings yet
- DOLFIN For Solving PDE With FEDocument12 pagesDOLFIN For Solving PDE With FEJohn VardakisNo ratings yet
- FEMDocument47 pagesFEMRichard Ore CayetanoNo ratings yet
- Raster Scan GraphicsDocument9 pagesRaster Scan GraphicsFazeel KhanNo ratings yet
- 3 Perceptron: Nnets - L. 3 February 10, 2002Document31 pages3 Perceptron: Nnets - L. 3 February 10, 2002mtayelNo ratings yet
- PRu 4Document13 pagesPRu 4Yash ShahNo ratings yet
- ADALINE For Pattern Classification: Polytechnic University Department of Computer and Information ScienceDocument27 pagesADALINE For Pattern Classification: Polytechnic University Department of Computer and Information ScienceDahlia DevapriyaNo ratings yet
- Solution Dseclzg524!01!102020 Ec2rDocument6 pagesSolution Dseclzg524!01!102020 Ec2rsrirams007100% (1)
- Artificial Neural NetworksDocument21 pagesArtificial Neural NetworksTooba LiaquatNo ratings yet
- Back PropagationDocument37 pagesBack PropagationJoão LaconNo ratings yet
- ECE 476 Power System AnalysisDocument36 pagesECE 476 Power System AnalysisFady MichealNo ratings yet
- DWDM Lab1Document3 pagesDWDM Lab1shreyastha2058No ratings yet
- Power System State Estimation Based On Nonlinear ProgrammingDocument6 pagesPower System State Estimation Based On Nonlinear ProgrammingBrenda Naranjo MorenoNo ratings yet
- ML Question Bank and SolDocument12 pagesML Question Bank and SolPrabhu Prasad DevNo ratings yet
- HW 4Document7 pagesHW 4Angel AvilaNo ratings yet
- FEM For 2D With MatlabDocument33 pagesFEM For 2D With Matlabammar_harbNo ratings yet
- E ≡ 1 f x x aj (x) ∆ wj=η f x x aj (x) η: x∈ D x∈DDocument2 pagesE ≡ 1 f x x aj (x) ∆ wj=η f x x aj (x) η: x∈ D x∈DTameemuddinNo ratings yet
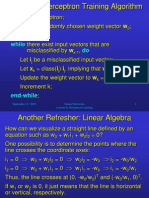
- Refresher: Perceptron Training AlgorithmDocument12 pagesRefresher: Perceptron Training Algorithmeduardo_quintanill_3No ratings yet
- Weighted Residual Method for Solving Linear Elastic ProblemsDocument10 pagesWeighted Residual Method for Solving Linear Elastic ProblemsHuma BaigNo ratings yet
- Lect3 UWA PDFDocument73 pagesLect3 UWA PDFअंकित शर्माNo ratings yet
- Gradient Descent Deep Learning: by T.K. Damodharan Vice President, RBS Reg - No: PC2013003013008Document37 pagesGradient Descent Deep Learning: by T.K. Damodharan Vice President, RBS Reg - No: PC2013003013008Shanmuganathan V (RC2113003011029)No ratings yet
- Lecture 1, Part 3: Training A Classifier: Roger GrosseDocument11 pagesLecture 1, Part 3: Training A Classifier: Roger GrosseShamil shihab pkNo ratings yet
- AI Machine Learning Neural Networks & Genetic AlgorithmsDocument71 pagesAI Machine Learning Neural Networks & Genetic Algorithmserjaimin89No ratings yet
- 1 - Single Layer Perceptron ANN SDocument40 pages1 - Single Layer Perceptron ANN SDumidu GhanasekaraNo ratings yet
- Machine Learning Tutorial SolutionsDocument8 pagesMachine Learning Tutorial SolutionsNguyen Tien ThanhNo ratings yet
- Machine Learning - Logistic RegressionDocument16 pagesMachine Learning - Logistic RegressionnagybalyNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- Andrew Rosenberg - Lecture 2.2: Linear Regression CSC 84020 - Machine LearningDocument34 pagesAndrew Rosenberg - Lecture 2.2: Linear Regression CSC 84020 - Machine LearningRoots999No ratings yet
- Andrew Rosenberg - Lecture 2.1: Vector Calculus CSC 84020 - Machine LearningDocument46 pagesAndrew Rosenberg - Lecture 2.1: Vector Calculus CSC 84020 - Machine LearningRoots999No ratings yet
- Andrew Rosenberg - Lecture 19: More EMDocument34 pagesAndrew Rosenberg - Lecture 19: More EMRoots999No ratings yet
- Andrew Rosenberg - Support Vector Machines (And Kernel Methods in General)Document45 pagesAndrew Rosenberg - Support Vector Machines (And Kernel Methods in General)Roots999No ratings yet
- Andrew Rosenberg - Lecture 21: Spectral ClusteringDocument43 pagesAndrew Rosenberg - Lecture 21: Spectral ClusteringRoots999No ratings yet
- Andrew Rosenberg - Lecture 12: Hidden Markov Models Machine LearningDocument34 pagesAndrew Rosenberg - Lecture 12: Hidden Markov Models Machine LearningRoots999No ratings yet
- Andrew Rosenberg - Lecture 20: Model AdaptationDocument35 pagesAndrew Rosenberg - Lecture 20: Model AdaptationRoots999No ratings yet
- Andrew Rosenberg - Lecture 23: Clustering EvaluationDocument24 pagesAndrew Rosenberg - Lecture 23: Clustering EvaluationRoots999No ratings yet
- Andrew Rosenberg - Lecture 22: EvaluationDocument32 pagesAndrew Rosenberg - Lecture 22: EvaluationRoots999No ratings yet
- Andrew Rosenberg - Lecture 1.2: Probability and Statistics CSC 84020 - Machine LearningDocument48 pagesAndrew Rosenberg - Lecture 1.2: Probability and Statistics CSC 84020 - Machine LearningRoots999No ratings yet
- Andrew Rosenberg - Support Vector Machines and Kernel MethodsDocument39 pagesAndrew Rosenberg - Support Vector Machines and Kernel MethodsRoots999No ratings yet
- Andrew Rosenberg - Lecture 18: Gaussian Mixture Models and Expectation MaximizationDocument34 pagesAndrew Rosenberg - Lecture 18: Gaussian Mixture Models and Expectation MaximizationRoots999No ratings yet
- Andrew Rosenberg - Lecture 11: Clustering Introduction and Projects Machine LearningDocument65 pagesAndrew Rosenberg - Lecture 11: Clustering Introduction and Projects Machine LearningRoots999No ratings yet
- Andrew Rosenberg - Lecture 14: Neural NetworksDocument50 pagesAndrew Rosenberg - Lecture 14: Neural NetworksRoots999No ratings yet
- Perceptron Learning ProcedureDocument1 pagePerceptron Learning ProcedureRoots999No ratings yet
- Andrew Rosenberg - Lecture 1.1: Introduction CSC 84020 - Machine LearningDocument33 pagesAndrew Rosenberg - Lecture 1.1: Introduction CSC 84020 - Machine LearningRoots999No ratings yet
- Adaline (Adaptive Linear Neural) Learning ProcedureDocument3 pagesAdaline (Adaptive Linear Neural) Learning ProcedureRoots999No ratings yet
- Andrew Rosenberg - Lecture 10: Junction Tree Algorithm CSCI 780 - Machine LearningDocument38 pagesAndrew Rosenberg - Lecture 10: Junction Tree Algorithm CSCI 780 - Machine LearningRoots999No ratings yet
- Unsupervised Learning: Part III Counter Propagation NetworkDocument17 pagesUnsupervised Learning: Part III Counter Propagation NetworkRoots999100% (1)
- Unsupervised Learning: Part II Self-Organizing MapsDocument36 pagesUnsupervised Learning: Part II Self-Organizing MapsRoots999No ratings yet
- Hopfield: An ExampleDocument27 pagesHopfield: An ExampleRoots999No ratings yet
- Unsupervised Learning 1Document31 pagesUnsupervised Learning 1Roots999No ratings yet
- Extended Back PropagationDocument11 pagesExtended Back PropagationRoots999No ratings yet
- Liang Tian - Learning From Data Through Support Vector MachinesDocument50 pagesLiang Tian - Learning From Data Through Support Vector MachinesRoots999No ratings yet
- Pattern AssociationDocument36 pagesPattern AssociationRoots999No ratings yet
- Back Propagation: VariationsDocument21 pagesBack Propagation: VariationsRoots999No ratings yet
- Pattern Association 1Document35 pagesPattern Association 1Roots999No ratings yet
- Artificial Neural NetworkDocument31 pagesArtificial Neural NetworkRoots999No ratings yet
- Biological Neural SystemsDocument20 pagesBiological Neural SystemsRoots999No ratings yet
- Back-Propagation Learning ProcedureDocument2 pagesBack-Propagation Learning ProcedureRoots999No ratings yet
- ICT PresentationDocument13 pagesICT PresentationThe Leo LoverNo ratings yet
- Eaton Tb09500001e PDFDocument62 pagesEaton Tb09500001e PDFJuan E Torres MNo ratings yet
- Quarter 1 Week 8Document3 pagesQuarter 1 Week 8Geoffrey Tolentino-UnidaNo ratings yet
- Stereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010Document50 pagesStereoscopic Restitution Instruments: Materi Kuliah GD3204 Fotogrametri I, Semester I-2009/2010ththaalNo ratings yet
- Kosice Schulze Bramey PDFDocument13 pagesKosice Schulze Bramey PDFandrel_fariasNo ratings yet
- JupaCreations BWCGDocument203 pagesJupaCreations BWCGsoudrack0% (1)
- Zhao PeiDocument153 pagesZhao PeiMuhammad Haris HamayunNo ratings yet
- Rising Stem Ball ValveDocument6 pagesRising Stem Ball ValveAnupam A. GandhewarNo ratings yet
- Inspection and Maintenance of Drillpipe Ebook PDFDocument39 pagesInspection and Maintenance of Drillpipe Ebook PDFAntónio OliveiraNo ratings yet
- BQ Mechanical (Sirim)Document7 pagesBQ Mechanical (Sirim)mohd farhan ariff zaitonNo ratings yet
- Air Pak SCBA Ordering Specifications (HS 6701)Document8 pagesAir Pak SCBA Ordering Specifications (HS 6701)QHSE ManagerNo ratings yet
- PV Design WorksheetDocument4 pagesPV Design WorksheetLarry Walker II100% (1)
- MTBE Presintation For IMCODocument26 pagesMTBE Presintation For IMCOMaryam AlqasimyNo ratings yet
- Understand Centrifugal CompressorDocument16 pagesUnderstand Centrifugal Compressorramanathan72-1100% (2)
- Geo-Informatics and Nano-Technology For Precision FARMING (AGRO-301) 5 SemesterDocument5 pagesGeo-Informatics and Nano-Technology For Precision FARMING (AGRO-301) 5 SemesterVinod Vincy67% (3)
- Marco OH Lighting-Business Plan PDFDocument43 pagesMarco OH Lighting-Business Plan PDFsjcoolgeniusNo ratings yet
- The Next 20 Billion Digital MarketDocument4 pagesThe Next 20 Billion Digital MarketakuabataNo ratings yet
- LNMIIT Course Information Form: A. B. C. D. E. FDocument2 pagesLNMIIT Course Information Form: A. B. C. D. E. FAayush JainNo ratings yet
- RefrigerationDocument11 pagesRefrigerationBroAmirNo ratings yet
- E12817 GT AC5300 Manual EnglishDocument152 pagesE12817 GT AC5300 Manual Englishlegato1984No ratings yet
- Control and On-Off Valves GuideDocument87 pagesControl and On-Off Valves Guidebaishakhi_b90100% (3)
- Testing concrete and brick strengthDocument2 pagesTesting concrete and brick strengthlolenlennNo ratings yet
- Introduction To Windows PDFDocument24 pagesIntroduction To Windows PDFRaymoon Twopass DaysNo ratings yet
- Tech Rider For ShaanDocument7 pagesTech Rider For ShaanSagar Shirole100% (1)
- Astm D-2361Document4 pagesAstm D-2361Claudia Da Rolt0% (1)
- Eurocode 6 How To Design Masonry Structures 19-1-09Document1 pageEurocode 6 How To Design Masonry Structures 19-1-09Mohamed Omer HassanNo ratings yet
- Applying The Haar Wavelet Transform To Time Series InformationDocument27 pagesApplying The Haar Wavelet Transform To Time Series InformationJohn LemonNo ratings yet
- 0.9PF PW 380v 3phase HF UPS10-120kvaDocument8 pages0.9PF PW 380v 3phase HF UPS10-120kvaArmandinho CaveroNo ratings yet
- INFRARED BASED VISITOR COUNTER TECHNOLOGYDocument21 pagesINFRARED BASED VISITOR COUNTER TECHNOLOGYRahul KumarNo ratings yet
- Manufacturing Egg Trays from Waste PaperDocument17 pagesManufacturing Egg Trays from Waste Paperravibarora86% (7)