You might also like
- PLC Programming from Novice to Professional: Learn PLC Programming with Training VideosFrom EverandPLC Programming from Novice to Professional: Learn PLC Programming with Training VideosRating: 5 out of 5 stars5/5 (1)
- How to buy and fly a quadcopter drone: a small guide and flight schoolFrom EverandHow to buy and fly a quadcopter drone: a small guide and flight schoolNo ratings yet
- Fanuc Roboguide - V6.Xx User Manual (en-JP)Document132 pagesFanuc Roboguide - V6.Xx User Manual (en-JP)Ioana Apucaloaei100% (2)
- Startup HandbookDocument274 pagesStartup Handbookedgard_gonzález_3No ratings yet
- Lab SessionsDocument14 pagesLab SessionshamzatariqmirzaNo ratings yet
- State Machines Hands-On Exercises LabViewDocument19 pagesState Machines Hands-On Exercises LabViewJorge Roman SantosNo ratings yet
- Micro800 Controller Programming Basics Lab ManualDocument40 pagesMicro800 Controller Programming Basics Lab ManualLuis Uribe AlbitesNo ratings yet
- K 604192 - 11 - Varidor 30AP C2 PDFDocument61 pagesK 604192 - 11 - Varidor 30AP C2 PDFTaufik Hidayat KurniansyahNo ratings yet
- AssignmentqDocument12 pagesAssignmentqDirajen PMNo ratings yet
- Scorbot TutorialDocument9 pagesScorbot TutorialPeru HayaNo ratings yet
- Private Villa Plumbing Bill of QuantitiesDocument54 pagesPrivate Villa Plumbing Bill of QuantitiesDelwar HossainNo ratings yet
- A255 Robot System User GuideDocument124 pagesA255 Robot System User GuideGustavo CahuanaNo ratings yet
- Dominar 400 UG ABS SPC - PDF (08.04.2019) PDFDocument79 pagesDominar 400 UG ABS SPC - PDF (08.04.2019) PDFLadLer100% (3)
- Robot Cell DesignDocument18 pagesRobot Cell DesignShione T Mundawarara57% (7)
- IRC5 Programming and Operation - 2007Document102 pagesIRC5 Programming and Operation - 2007Siska Andriana Gusti100% (2)
- Accelerometers PDFDocument24 pagesAccelerometers PDFvvipmembersNo ratings yet
- Accelerometers PDFDocument24 pagesAccelerometers PDFvvipmembersNo ratings yet
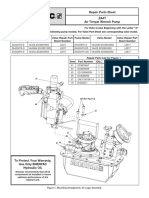
- Enerpac Torque Wrench ManualDocument10 pagesEnerpac Torque Wrench ManualM Saad KhanNo ratings yet
- Control and Simulation in LabVIEWDocument59 pagesControl and Simulation in LabVIEWGordana JanevskaNo ratings yet
- Robotics Lab Manuals Final PDFDocument38 pagesRobotics Lab Manuals Final PDFravihbti100% (1)
- Electricity Class 10 NotesDocument10 pagesElectricity Class 10 NotesKota SrinadhNo ratings yet
- E 5 Axis Arm Robot TrainerDocument401 pagesE 5 Axis Arm Robot TrainerPe Vande100% (1)
- Robotic Arm Final Year Project ReportDocument35 pagesRobotic Arm Final Year Project Reportrsatelliteara_465614100% (4)
- Active Robot Training ManualDocument114 pagesActive Robot Training ManualGuillermo Alejandro MontielNo ratings yet
- IESLCoE Robotics-Assignment - 2Document11 pagesIESLCoE Robotics-Assignment - 2kavish malakaNo ratings yet
- Robotic Arm Manipulation - MUGUNTHANDocument7 pagesRobotic Arm Manipulation - MUGUNTHANMugun ThanNo ratings yet
- Understanding Manual and Automatic Operations of Industrial RobotsDocument35 pagesUnderstanding Manual and Automatic Operations of Industrial RobotsWafiNo ratings yet
- Introduction To Robotics: MechatronicsDocument26 pagesIntroduction To Robotics: MechatronicsManuel HurtadoNo ratings yet
- Final Report: Experimental Study of Robotic Assembly and Force Control TasksDocument28 pagesFinal Report: Experimental Study of Robotic Assembly and Force Control Tasksrsatelliteara_465614No ratings yet
- Computer Integrated Manufacturing Applications: MechatronicsDocument34 pagesComputer Integrated Manufacturing Applications: MechatronicsVictor PujolsNo ratings yet
- 02 - Project 2 Excercise Robotino Part A ExcercisesDocument30 pages02 - Project 2 Excercise Robotino Part A ExcercisesdedegressNo ratings yet
- Experiment No 4 (2)Document6 pagesExperiment No 4 (2)harisraja47985No ratings yet
- Labs-CIM Lab ManualDocument48 pagesLabs-CIM Lab ManualRicardoVillanuevaCabreraNo ratings yet
- completeFinalReport SieDeenLauDocument28 pagescompleteFinalReport SieDeenLauNagababu RockzzNo ratings yet
- Robotics Lab Report Group 8 PDFDocument16 pagesRobotics Lab Report Group 8 PDFSourabh AgrawalNo ratings yet
- XYZ Acquisition System: Talha Ahmed Khan Ee-08-266 IMRAN SAEED EE-08-289Document9 pagesXYZ Acquisition System: Talha Ahmed Khan Ee-08-266 IMRAN SAEED EE-08-289aloneheartsNo ratings yet
- Robot Training 2023 GETDocument17 pagesRobot Training 2023 GETVISHNUNo ratings yet
- 15.04.1274 Jurnal EprocDocument8 pages15.04.1274 Jurnal EprocIndra NaufaldiNo ratings yet
- FANUC Robotics Software OptionsDocument3 pagesFANUC Robotics Software OptionsJay Cee RizoNo ratings yet
- And-Place-System-For-Ress-Feeding: Call Toll-FreeDocument9 pagesAnd-Place-System-For-Ress-Feeding: Call Toll-FreeRaviraj DalviNo ratings yet
- Chapter 1: Industrial Applications Presented byDocument18 pagesChapter 1: Industrial Applications Presented byVaSuNo ratings yet
- RobotinoDocument13 pagesRobotinoFernando SimõesNo ratings yet
- 3HAC027097-001 Rev - enDocument32 pages3HAC027097-001 Rev - enmanehrkornNo ratings yet
- Mobile Robot Control LabDocument21 pagesMobile Robot Control LabNizar TayemNo ratings yet
- Sim.I.am - A Robot SimulatorDocument27 pagesSim.I.am - A Robot Simulatoryashar2500No ratings yet
- BFP A8618Document310 pagesBFP A8618Anderson Gomez CastroNo ratings yet
- Finalized Report Lab 1Document23 pagesFinalized Report Lab 1hanifNo ratings yet
- IRC5 Basic Operations Student Manual Rev3 SlideshowDocument105 pagesIRC5 Basic Operations Student Manual Rev3 Slideshowhisham_eyesNo ratings yet
- 18BT030203 - Abhishek (A&R Lab)Document23 pages18BT030203 - Abhishek (A&R Lab)abhishek bhardwajNo ratings yet
- I&M Lab ManualDocument20 pagesI&M Lab ManualSaad MalikNo ratings yet
- Programming A Fanuc Industrial Robot For Incremental Sheet FormingDocument11 pagesProgramming A Fanuc Industrial Robot For Incremental Sheet Forming501705016No ratings yet
- Lab Assignment 2-July 2021Document1 pageLab Assignment 2-July 2021Shah KhanNo ratings yet
- Lab RoboticsDocument14 pagesLab RoboticsNurul AdawiyahNo ratings yet
- Kine Record1Document39 pagesKine Record1Abdul AneesNo ratings yet
- Chapter 1: Industrial Applications Presented byDocument18 pagesChapter 1: Industrial Applications Presented bypradabkNo ratings yet
- Application of LabView Vision and Fuzzy Control For Controling A Gantry CraneDocument4 pagesApplication of LabView Vision and Fuzzy Control For Controling A Gantry CraneJournalofICTNo ratings yet
- XXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64Document12 pagesXXXXXXXXX (Title) : Submitted by Chaitanya Ranade 64HRITHIK POOJARYNo ratings yet
- Mini Amphibious Vehicle Control SystemDocument28 pagesMini Amphibious Vehicle Control SystemAmeya KusalkarNo ratings yet
- Module-3 - Robotic Cell Design and Programming - Robotics and Automation - 22ETC151 - 251-1Document12 pagesModule-3 - Robotic Cell Design and Programming - Robotics and Automation - 22ETC151 - 251-1chandanpurvey2No ratings yet
- Ac 2008-705: Robot Palletizing Work Cell Simulation: Akbar Eslami, Elizabeth City State UniversityDocument14 pagesAc 2008-705: Robot Palletizing Work Cell Simulation: Akbar Eslami, Elizabeth City State University18491A0447 LAKKAVARAPU ABHI RAM SAINo ratings yet
- Safety Manual (B-80687EN 10)Document35 pagesSafety Manual (B-80687EN 10)Jander Luiz TomaziNo ratings yet
- Operation Instruction For Feed Pushing RobotDocument28 pagesOperation Instruction For Feed Pushing Robotsamuel aprecido delgadoNo ratings yet
- Scorbot BookDocument48 pagesScorbot BookDaniel BeylerianNo ratings yet
- Robotic Arm Guide for Safety and TypesDocument10 pagesRobotic Arm Guide for Safety and TypesAhmed AliNo ratings yet
- Kulliyyah of Engineering Mechatronics Lab ReportDocument11 pagesKulliyyah of Engineering Mechatronics Lab ReportDoodee MohammedNo ratings yet
- User Manual: Shenzhen Elephant Robotics Technology Co., LTDDocument28 pagesUser Manual: Shenzhen Elephant Robotics Technology Co., LTDWa KaNo ratings yet
- Robotic Arm LabDocument5 pagesRobotic Arm LabBryan Owen Salcedo SantosNo ratings yet
- 01 Hans Robot Elfin Maunal Hardware Installation EN PDFDocument36 pages01 Hans Robot Elfin Maunal Hardware Installation EN PDF123qweNo ratings yet
- PID5164353Document7 pagesPID5164353vvipmembersNo ratings yet
- Photovoltaic Agricultural Internet of Things TowarDocument14 pagesPhotovoltaic Agricultural Internet of Things TowarvvipmembersNo ratings yet
- Kulmnyelal2022 OnlinefirstDocument12 pagesKulmnyelal2022 OnlinefirstvvipmembersNo ratings yet
- INSEA2022004Document39 pagesINSEA2022004vvipmembersNo ratings yet
- Implementationof Digital Image Processing Using NImy RIOand Arduino Mega 2560 As Controlleron Rover Bogie RobotDocument7 pagesImplementationof Digital Image Processing Using NImy RIOand Arduino Mega 2560 As Controlleron Rover Bogie RobotvvipmembersNo ratings yet
- NFI Arduino Labview 6 Months TrainingDocument8 pagesNFI Arduino Labview 6 Months Trainingvvipmembers100% (1)
- Using LabVIEW Templates and Sample Projects For Desktop ApplicationsDocument27 pagesUsing LabVIEW Templates and Sample Projects For Desktop ApplicationsvvipmembersNo ratings yet
- 2-16-1435395421-4. LabVIEW Interfaced Wireless Bluetooth Controlled VehicleDocument4 pages2-16-1435395421-4. LabVIEW Interfaced Wireless Bluetooth Controlled VehiclevvipmembersNo ratings yet
- Manual de Labview+solidworkDocument18 pagesManual de Labview+solidworkTameClaudioNo ratings yet
- Still EK-X / 61210A00299 / 2010: Wtrading Oude Graaf 5A 6002NL Weert NL Telefoon E-Mail InternetDocument1 pageStill EK-X / 61210A00299 / 2010: Wtrading Oude Graaf 5A 6002NL Weert NL Telefoon E-Mail InternetvvipmembersNo ratings yet
- Hands-On LabVIEW State Machines PresenationDocument11 pagesHands-On LabVIEW State Machines PresenationSriNo ratings yet
- NI Mechatronics Machine Design GuideDocument46 pagesNI Mechatronics Machine Design GuideGautam TyagiNo ratings yet
- NFI Arduino Labview 6 Months TrainingDocument8 pagesNFI Arduino Labview 6 Months Trainingvvipmembers100% (1)
- LabVIEW Introduction PreWDocument23 pagesLabVIEW Introduction PreWajith shettyNo ratings yet
- Rudra ProjectDocument40 pagesRudra ProjectvvipmembersNo ratings yet
- Virtualinstrumentation2 150506100543 Conversion Gate01Document177 pagesVirtualinstrumentation2 150506100543 Conversion Gate01vvipmembersNo ratings yet
- ADXL345Document40 pagesADXL345Wesllen Dias SouzaNo ratings yet
- Premium AGM battery guide and specificationsDocument36 pagesPremium AGM battery guide and specificationsvvipmembersNo ratings yet
- Signal Conditioning Piezo Electric SensorDocument6 pagesSignal Conditioning Piezo Electric SensorAaqib KhanNo ratings yet
- FLX FlexiForce Bibliography PDFDocument1 pageFLX FlexiForce Bibliography PDFvvipmembersNo ratings yet
- PWM Ni LabviewDocument3 pagesPWM Ni LabviewvvipmembersNo ratings yet
- ArduinoMEGA2560 PDFDocument8 pagesArduinoMEGA2560 PDFvvipmembersNo ratings yet
- Signal Conditioning Piezo Electric SensorDocument6 pagesSignal Conditioning Piezo Electric SensorAaqib KhanNo ratings yet
- ChipKIT - Installing SoftwareDocument4 pagesChipKIT - Installing Softwarezeged1No ratings yet
- Osepp-Accel-01 Rev1 1 PDFDocument1 pageOsepp-Accel-01 Rev1 1 PDFvvipmembersNo ratings yet
- Gbu8d-Dc ComponentsDocument1 pageGbu8d-Dc ComponentsRodolfo CabreraNo ratings yet
- Company Profile: Only Milling Since 1967Document16 pagesCompany Profile: Only Milling Since 1967PavelNo ratings yet
- Wuhan Lan-Sun CNC Plasma Cutter ZLQ-BL3Document10 pagesWuhan Lan-Sun CNC Plasma Cutter ZLQ-BL3AndrésRodríguezNo ratings yet
- Alliance Technical Catalog Aug 2022 - LR - 1672742721Document236 pagesAlliance Technical Catalog Aug 2022 - LR - 1672742721Will CreNo ratings yet
- P0011 - P0012Document8 pagesP0011 - P0012jeremih alhegnNo ratings yet
- Ford 5R55N: Click On Part Numbers For Product Details or VisitDocument1 pageFord 5R55N: Click On Part Numbers For Product Details or VisitJefithoCortezNo ratings yet
- ABB SOT Guideline For Choosing Products 2007Document4 pagesABB SOT Guideline For Choosing Products 2007Victor GuzmanNo ratings yet
- Broadcom Bcm2046 BluetoothDocument2 pagesBroadcom Bcm2046 BluetoothMishaCveleNo ratings yet
- M 1Document59 pagesM 1KEEP CALM studiosNo ratings yet
- ManDocument11 pagesManSuresh Kumar SaripalliNo ratings yet
- 4K Security Camera Kits and AccessoriesDocument6 pages4K Security Camera Kits and AccessoriesGlenn KapzNo ratings yet
- 7SJ80 7SK80 PA enDocument2 pages7SJ80 7SK80 PA enGiang Cao ThoNo ratings yet
- Steiner Belt Chart for Agricultural EquipmentDocument2 pagesSteiner Belt Chart for Agricultural EquipmentVM Elliott IINo ratings yet
- 1500 Kva Technical SubmittalDocument7 pages1500 Kva Technical SubmittalFaheem RoyNo ratings yet
- DsPIC33FJ32MC204 PIM Information SheetDocument6 pagesDsPIC33FJ32MC204 PIM Information SheetGerman Mauricio Neira VargasNo ratings yet
- Testa Eléctrica-118FRRDocument1 pageTesta Eléctrica-118FRRAdalberto ParelhoNo ratings yet
- Installation - Operation - Maintenance AutoclaveDocument8 pagesInstallation - Operation - Maintenance AutoclaveSusana Smaldone MillánNo ratings yet
- ICT Technical-Drafting 10 Q4 LAS1 FINALDocument12 pagesICT Technical-Drafting 10 Q4 LAS1 FINALEnternityNo ratings yet
- Berger Lahr Servomootorid (Põleti)Document36 pagesBerger Lahr Servomootorid (Põleti)villem69No ratings yet
- Catálogo - Componentes Hidráulicos - Conexões GSHYDRODocument32 pagesCatálogo - Componentes Hidráulicos - Conexões GSHYDROMarcio Jr.No ratings yet
- Over 200 Common Engine Codes P0001-P1369Document16 pagesOver 200 Common Engine Codes P0001-P1369Bigshow MeyerNo ratings yet
- Notebook Compal JFL92 Service ManualDocument46 pagesNotebook Compal JFL92 Service ManualPaweł WitasNo ratings yet
- TRAX Automatic Switch Box Reduces Transformer Test TimeDocument4 pagesTRAX Automatic Switch Box Reduces Transformer Test TimeEduardo ToroNo ratings yet
- Replacing MechatronicsDocument7 pagesReplacing MechatronicsNenad VlašičekNo ratings yet
- LG Therma V Split Rukovodstvo PolzovatelyaDocument30 pagesLG Therma V Split Rukovodstvo Polzovatelyagheorghe tabaraNo ratings yet