You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Super X/Xi Series VRF: Variable Refrigerant Flow SystemsDocument104 pagesSuper X/Xi Series VRF: Variable Refrigerant Flow SystemsIván CovarrubiasNo ratings yet
- Module 1.3 - Applications of IntegrationDocument4 pagesModule 1.3 - Applications of IntegrationJ KimNo ratings yet
- Exercise 3-1-Analyze Drawdown TestDocument4 pagesExercise 3-1-Analyze Drawdown TestSohaibSeidNo ratings yet
- APC Back-UPS - BX1100LI-MSDocument3 pagesAPC Back-UPS - BX1100LI-MSArya NawanNo ratings yet
- Birla Institute of Technology and Science Pilani, Pilani Campus (Raj.)Document3 pagesBirla Institute of Technology and Science Pilani, Pilani Campus (Raj.)Arihant JainNo ratings yet
- Model DFEG 60 HZ: Diesel Generator SetDocument8 pagesModel DFEG 60 HZ: Diesel Generator SetLenon LiriosNo ratings yet
- Chiller ChecklistDocument2 pagesChiller Checklistmk saravanan100% (1)
- Breather Valve CalcDocument12 pagesBreather Valve CalczamijakaNo ratings yet
- Trigonometry SlidesDocument115 pagesTrigonometry Slideschristian pagtamaNo ratings yet
- Thyristor Commutation PDFDocument40 pagesThyristor Commutation PDFalbert agung matondangNo ratings yet
- Chapter 1, B, Introduction To Heat TransferDocument68 pagesChapter 1, B, Introduction To Heat Transfer01094255175 01094255175No ratings yet
- A Bidirectional LLC Resonant Converter With Automatic Forward and Backward Mode TransitiDocument14 pagesA Bidirectional LLC Resonant Converter With Automatic Forward and Backward Mode TransitiMuhammad Saqib AliNo ratings yet
- Solution of Momentum Transport Problems Using Navier Stokes EquationDocument21 pagesSolution of Momentum Transport Problems Using Navier Stokes EquationAndres OrtegaNo ratings yet
- Magnetics Design Tables: Appendix 2Document6 pagesMagnetics Design Tables: Appendix 2Gopichand GaddamNo ratings yet
- Derivation of Formula For Calculation of Turns Per Volts of Transformer DesignDocument15 pagesDerivation of Formula For Calculation of Turns Per Volts of Transformer DesignJemal Musa100% (1)
- R-410A Air-Cooled ChillersDocument84 pagesR-410A Air-Cooled ChillersThe Ka1serNo ratings yet
- Unit Conversion WorksheetDocument2 pagesUnit Conversion WorksheetThea Sophia BuenoNo ratings yet
- Calculating required lumens output for room illuminationDocument20 pagesCalculating required lumens output for room illuminationEj ParañalNo ratings yet
- Product Data Sheet: Acti 9 Idpna Vigi - Rcbo - 1P+N - 16A - C Curve - 4500A - 30ma - Type AcDocument3 pagesProduct Data Sheet: Acti 9 Idpna Vigi - Rcbo - 1P+N - 16A - C Curve - 4500A - 30ma - Type AcFede MysynaNo ratings yet
- Generator Synchronizing ParametersDocument14 pagesGenerator Synchronizing ParametersRam SinghNo ratings yet
- MMAN2300 Mock Exam QS 1Document15 pagesMMAN2300 Mock Exam QS 1Aaron HoytashNo ratings yet
- TS GENCO Assistant Engineer-Electrical 2015 Question PaperDocument12 pagesTS GENCO Assistant Engineer-Electrical 2015 Question PapervishNo ratings yet
- Numerical Overcurrent Protection Relay - Argus 1Document4 pagesNumerical Overcurrent Protection Relay - Argus 1sulemanchNo ratings yet
- Analytical Model of An Ultrasonic Cross-Correlation Flow Meter, Part 1 - ..Document7 pagesAnalytical Model of An Ultrasonic Cross-Correlation Flow Meter, Part 1 - ..Thiago TavaresNo ratings yet
- Transmission Lines-2Document46 pagesTransmission Lines-2Dhruv GolaniNo ratings yet
- Homework As PDF-fileDocument5 pagesHomework As PDF-fileyu1rtNo ratings yet
- FIITJEE Chennai MAT Clock Angles Times ProblemsDocument2 pagesFIITJEE Chennai MAT Clock Angles Times ProblemsBalaadithya P GNo ratings yet
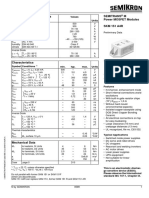
- Absolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RDocument5 pagesAbsolute Maximum Ratings Semitrans M Power MOSFET Modules SKM 151 A4RChaovalit Jitsinthu100% (1)
- Energy Conservation and Audit - 9092Document4 pagesEnergy Conservation and Audit - 9092Nilesh MahajanNo ratings yet
- Hybrid MicrogridDocument69 pagesHybrid MicrogridRamanan MNo ratings yet