You might also like
- S.B. Murray Et Al - The Role of Energy Distribution On The Transmission of DetonationDocument30 pagesS.B. Murray Et Al - The Role of Energy Distribution On The Transmission of DetonationOlmeaNo ratings yet
- Doug Talley and Ed Coy - The Constant Volume Limit of Pulsed Propulsion For A Constant y Ideal GasDocument13 pagesDoug Talley and Ed Coy - The Constant Volume Limit of Pulsed Propulsion For A Constant y Ideal GasOlmeaNo ratings yet
- Fred Schauer, Jeff Stutrud and Royce Bradley - Detonation Initiation Studies and Performance Results For Pulsed Detonation Engine ApplicationsDocument11 pagesFred Schauer, Jeff Stutrud and Royce Bradley - Detonation Initiation Studies and Performance Results For Pulsed Detonation Engine ApplicationsOlmeaNo ratings yet
- D.R. Kassoy - Combustion Coupled Flow Dynamics in Solid Rocket MotorsDocument39 pagesD.R. Kassoy - Combustion Coupled Flow Dynamics in Solid Rocket MotorsOlmeaNo ratings yet
- Bao Wang, Hao He and S.-T. John Yu - Direct Calculation of Wave Implosion For Detonation Initiation in Pulsed Detonation EnginesDocument18 pagesBao Wang, Hao He and S.-T. John Yu - Direct Calculation of Wave Implosion For Detonation Initiation in Pulsed Detonation EnginesOlmeaNo ratings yet
- August J. Rolling, Paul I. King and Fred R. Schauer - Propagation of Detonation Waves in Tubes Split From A PDE Thrust TubeDocument13 pagesAugust J. Rolling, Paul I. King and Fred R. Schauer - Propagation of Detonation Waves in Tubes Split From A PDE Thrust TubeOlmeaNo ratings yet
- S.I. Jackson and J.E. Shepherd - The Development of A Pulse Detonation Engine Simulator FacilityDocument109 pagesS.I. Jackson and J.E. Shepherd - The Development of A Pulse Detonation Engine Simulator FacilityOlmeaNo ratings yet
- E. Wintenberger and J.E. Shepherd - Detonation Waves and Pulse Detonation EnginesDocument37 pagesE. Wintenberger and J.E. Shepherd - Detonation Waves and Pulse Detonation EnginesOlmeaNo ratings yet
- Craig M. Tarver and Estella M. McGuire - Reactive Flow Modeling of The Interaction of TATB Detonation Waves With Inert MaterialsDocument10 pagesCraig M. Tarver and Estella M. McGuire - Reactive Flow Modeling of The Interaction of TATB Detonation Waves With Inert MaterialsSteemWheelNo ratings yet
- M. Arian and A. M. Tahsini - Nozzle Effects On Pulse Detonation Engines PerformanceDocument9 pagesM. Arian and A. M. Tahsini - Nozzle Effects On Pulse Detonation Engines PerformanceOlmeaNo ratings yet
- Prashaanth Ravindran - Numerical Simulation of Pulse Detonation Phenomena in A Parallel EnvironmentDocument85 pagesPrashaanth Ravindran - Numerical Simulation of Pulse Detonation Phenomena in A Parallel EnvironmentOlmeaNo ratings yet
- Ralf Deiterding - Detonation Simulation With The AMROC FrameworkDocument15 pagesRalf Deiterding - Detonation Simulation With The AMROC FrameworkOlmeaNo ratings yet
- Khalid M. Saqr Et Al - Transient Characteristics of C3H8/O2 Turbulent Mixing in A Hypersonic Pulse Detonation EngineDocument6 pagesKhalid M. Saqr Et Al - Transient Characteristics of C3H8/O2 Turbulent Mixing in A Hypersonic Pulse Detonation EngineOlmeaNo ratings yet
- G.D. Roy Et Al - Pulse Detonation Propulsion: Challenges, Current Status, and Future PerspectiveDocument128 pagesG.D. Roy Et Al - Pulse Detonation Propulsion: Challenges, Current Status, and Future PerspectiveOlmeaNo ratings yet
- F. Genin and S. Menon - A Multi-Scale Simulation Methodology For Turbulent CombustionDocument6 pagesF. Genin and S. Menon - A Multi-Scale Simulation Methodology For Turbulent CombustionOlmeaNo ratings yet
- Guy E. Barasch - Light Flash Produced by An Atmospheric Nuclear ExplosionDocument4 pagesGuy E. Barasch - Light Flash Produced by An Atmospheric Nuclear ExplosionOlmeaNo ratings yet
- Chang-Kee Kim, Kyoung-Su Im and S. - T. John Yu - Direct Calculation of High-Speed Cavity Flows in A Scramjet Engine by The CESE MethodDocument8 pagesChang-Kee Kim, Kyoung-Su Im and S. - T. John Yu - Direct Calculation of High-Speed Cavity Flows in A Scramjet Engine by The CESE MethodOlmeaNo ratings yet
- Neil C. Hawkes - Characterization of Transient Plasma Ignition Flame Kernel Growth For Varying Inlet ConditionsDocument103 pagesNeil C. Hawkes - Characterization of Transient Plasma Ignition Flame Kernel Growth For Varying Inlet ConditionsOlmeaNo ratings yet
- Atsuslri Abe Et Al - The Role of Shock Waves in High Speed Compressible Turbulent FlowsDocument8 pagesAtsuslri Abe Et Al - The Role of Shock Waves in High Speed Compressible Turbulent FlowsOlmeaNo ratings yet
- J. Philip Drummond Et Al - Hypersonic Airbreathing Propulsion: An Aerodynamics, Aerothermodynamics, and Acoustics Competency White PaperDocument44 pagesJ. Philip Drummond Et Al - Hypersonic Airbreathing Propulsion: An Aerodynamics, Aerothermodynamics, and Acoustics Competency White PaperOlmeaNo ratings yet
- Venkata Narasimham Nori - Unsteady Flow in A Mixed-Compression Inlet at Mach 3.5Document145 pagesVenkata Narasimham Nori - Unsteady Flow in A Mixed-Compression Inlet at Mach 3.5OlmeaNo ratings yet
- Isaiah M. Blankson - NASA GRC Research in Aerospace Propulsion With Potential Collaboration OpportunitiesDocument97 pagesIsaiah M. Blankson - NASA GRC Research in Aerospace Propulsion With Potential Collaboration OpportunitiesOlmeaNo ratings yet
- Erdoğan Aydemir, Nick A. Worth and James R. Dawson - An Investigation of Vortex Ring Formation in Strongly Forced Jet Flows by High Speed Particle Image VelocimetryDocument11 pagesErdoğan Aydemir, Nick A. Worth and James R. Dawson - An Investigation of Vortex Ring Formation in Strongly Forced Jet Flows by High Speed Particle Image VelocimetryOlmeaNo ratings yet
- C. Gerlach Et Al - Advances in Understanding of Flame Acceleration For The Improving of The Combustion EfficiencyDocument12 pagesC. Gerlach Et Al - Advances in Understanding of Flame Acceleration For The Improving of The Combustion EfficiencyOlmeaNo ratings yet
- E. Wintenberger and J. E. Shepherd - Model For The Performance of Airbreathing Pulse-Detonation EnginesDocument11 pagesE. Wintenberger and J. E. Shepherd - Model For The Performance of Airbreathing Pulse-Detonation EnginesOlmeaNo ratings yet
- Hao He - Numerical Simulations of Unsteady Flows in A Pulse Detonation Engine by The Space-Time Conservation Element and Solution Element MethodDocument249 pagesHao He - Numerical Simulations of Unsteady Flows in A Pulse Detonation Engine by The Space-Time Conservation Element and Solution Element MethodOlmeaNo ratings yet
- Hao He Et Al - Application of The CESE Method To PDE Plume Dynamics Using A Beowulf ClusterDocument10 pagesHao He Et Al - Application of The CESE Method To PDE Plume Dynamics Using A Beowulf ClusterOlmeaNo ratings yet
- Dora Elia Musielak - Injection and Mixing of Gas Propellants For Pulse Detonation PropulsionDocument18 pagesDora Elia Musielak - Injection and Mixing of Gas Propellants For Pulse Detonation PropulsionOlmeaNo ratings yet
- Benjamin Zittere - Flowpath Design of A Three-Tube Valve-Less Pulse Detonation CombustorDocument77 pagesBenjamin Zittere - Flowpath Design of A Three-Tube Valve-Less Pulse Detonation CombustorOlmeaNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- PACO IE3 MotorDocument24 pagesPACO IE3 Motoriqxca azmyaniNo ratings yet
- A Lifting Line Theory For A Three-Dimensional Hydrofoil: Hui Liang and Zhi ZongDocument7 pagesA Lifting Line Theory For A Three-Dimensional Hydrofoil: Hui Liang and Zhi ZongKoShweBaNo ratings yet
- 3Document355 pages3phanminh91100% (1)
- Uee Bits PDFDocument18 pagesUee Bits PDFSurapu.Sri ganeshNo ratings yet
- A Practical 3D Bounding Surface Plastic Sand Model For Geotechnical Earthquake Engineering ApplicationDocument11 pagesA Practical 3D Bounding Surface Plastic Sand Model For Geotechnical Earthquake Engineering ApplicationMiguel Angel LuceroNo ratings yet
- Savelyev I.V.-Physics - A General Course. Volume III (1989) PDFDocument159 pagesSavelyev I.V.-Physics - A General Course. Volume III (1989) PDFSuper OMG GamerNo ratings yet
- Separator Sizing SpreadsheetDocument40 pagesSeparator Sizing SpreadsheetWalid Ben Husein100% (2)
- Modular Compact Rheometers: MCR 72 MCR 92Document7 pagesModular Compact Rheometers: MCR 72 MCR 92Tank TopNo ratings yet
- TransientDocument12 pagesTransientLester MuscaNo ratings yet
- PCS130 Magnetic Fields 5Document8 pagesPCS130 Magnetic Fields 5Ekan Ahmad100% (1)
- The Answer Keys Are at The End of The Document.: Section #1 - These Questions Are Worth Two Marks EachDocument26 pagesThe Answer Keys Are at The End of The Document.: Section #1 - These Questions Are Worth Two Marks Eachdsa0% (1)
- Chapter 1 - MsiDocument81 pagesChapter 1 - MsiYua CincoNo ratings yet
- Worldviews, Science and Us - Philosophy and Complexity - Carlos Gershenson, Diederik Aerts, Bruce EdmondsDocument359 pagesWorldviews, Science and Us - Philosophy and Complexity - Carlos Gershenson, Diederik Aerts, Bruce EdmondsNicolas GilibertiNo ratings yet
- Selected References: Ion ImplantationDocument34 pagesSelected References: Ion Implantationmskumar_554No ratings yet
- Wa0006.Document2 pagesWa0006.M.Thamizh VananNo ratings yet
- King Fahd University of Petroleum & Minerals Mechanical Engineering Department Thermodynamics I - ME 203Document1 pageKing Fahd University of Petroleum & Minerals Mechanical Engineering Department Thermodynamics I - ME 2033bdul78No ratings yet
- EXP - 4 Chip MorphologyDocument2 pagesEXP - 4 Chip MorphologyRaju SaiNo ratings yet
- 9702 Nos Ps 5 PDFDocument4 pages9702 Nos Ps 5 PDFDe NimNo ratings yet
- Gas Turbine Performance CalculationDocument7 pagesGas Turbine Performance CalculationAtiqur RahmanNo ratings yet
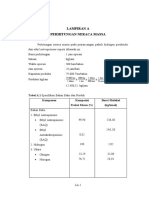
- Neraca MassaDocument38 pagesNeraca MassaGunNo ratings yet
- EAMCET Engineering Information BrochureDocument23 pagesEAMCET Engineering Information BrochureAnweshaBoseNo ratings yet
- MD1-0-E-505!06!00001 Generator Transformer Sizing CalculationDocument19 pagesMD1-0-E-505!06!00001 Generator Transformer Sizing Calculationtvpham12350% (2)
- Wpe ExercisesDocument11 pagesWpe ExercisesjoeNo ratings yet
- Fluid Mechanics (Experiment)Document29 pagesFluid Mechanics (Experiment)simple-CE-studNo ratings yet
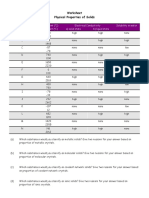
- 8 WORKSHEET Properties of SolidsDocument1 page8 WORKSHEET Properties of Solidskomal sheikhNo ratings yet
- Sheet - 01-Pages-27-72Document46 pagesSheet - 01-Pages-27-72Hemant KumarNo ratings yet
- Multiple Choice Test:1Document3 pagesMultiple Choice Test:1ldNo ratings yet
- Final 08 Engg SolDocument6 pagesFinal 08 Engg SolyanelaNo ratings yet
- Design Method of Api High Pressure FRP PipeDocument2 pagesDesign Method of Api High Pressure FRP PipejaymuscatNo ratings yet