You might also like
- Difficult Doctrine of The Love of GodDocument93 pagesDifficult Doctrine of The Love of GodRocio Pireyek100% (8)
- FeedCon (Unit 5) PDFDocument43 pagesFeedCon (Unit 5) PDFAbby MacallaNo ratings yet
- EC2255-Solved Problems in Control Systems PDFDocument182 pagesEC2255-Solved Problems in Control Systems PDFmaheshbabu527100% (2)
- Polite Form and Verb Stems: Not Being Rude in JapanDocument84 pagesPolite Form and Verb Stems: Not Being Rude in Japaneulea larkaroNo ratings yet
- Engaging MathematicsDocument48 pagesEngaging MathematicsDani ChiriacNo ratings yet
- Stability in Control SystemsDocument20 pagesStability in Control Systemssamir100% (1)
- Aa GTG 000024Document35 pagesAa GTG 000024Edith Moreno UrzuaNo ratings yet
- Clocks, Watches & Scientific Instruments - Skinner Auction 2760MDocument132 pagesClocks, Watches & Scientific Instruments - Skinner Auction 2760MSkinnerAuctions100% (2)
- Bonus, Alexander Evan - The Metronomic Performance Practice - A History of Rhythm, Metronomes, and The Mechanization of MusicalityDocument597 pagesBonus, Alexander Evan - The Metronomic Performance Practice - A History of Rhythm, Metronomes, and The Mechanization of MusicalityNoMoPoMo576100% (2)
- StabilityDocument20 pagesStabilityravalNo ratings yet
- Group 1 Nondigital Instructional MaterialsDocument22 pagesGroup 1 Nondigital Instructional MaterialsJhon Paul Esplanada Soriano100% (1)
- Students Guide To Classical ControlDocument5 pagesStudents Guide To Classical ControlmixarimNo ratings yet
- EC2255-Solved Problems in Control System IV Semester ECEDocument182 pagesEC2255-Solved Problems in Control System IV Semester ECEBEKHITI BelkacemNo ratings yet
- Control Engineering: Closed-Loop Poles Are The Positions of The Poles (OrDocument9 pagesControl Engineering: Closed-Loop Poles Are The Positions of The Poles (OrWanambwa SilagiNo ratings yet
- Curs06-07 - Stability, Observability, ControllabilityDocument38 pagesCurs06-07 - Stability, Observability, ControllabilityConstantin TomuleseiNo ratings yet
- Characteristics and Stability of Open Loop and Closed Loop Systems 1.aim of The ExperimentDocument14 pagesCharacteristics and Stability of Open Loop and Closed Loop Systems 1.aim of The ExperimentŞemsettin karakuşNo ratings yet
- World: Lecture NotesDocument26 pagesWorld: Lecture Notesrakheep123No ratings yet
- State Observer - Wikipedia, The Free EncyclopediaDocument6 pagesState Observer - Wikipedia, The Free EncyclopediaNhà Của CọpNo ratings yet
- Control Systems Two Marks QuestionDocument41 pagesControl Systems Two Marks QuestionSk WajuddinNo ratings yet
- Romblon State University College of Engineering Technology Department of Mechanical Engineering Odiongan, RomblonDocument4 pagesRomblon State University College of Engineering Technology Department of Mechanical Engineering Odiongan, RomblonYhan SombilonNo ratings yet
- Introducción PDFDocument14 pagesIntroducción PDFsalimNo ratings yet
- 04 - Chapter 1 PDFDocument17 pages04 - Chapter 1 PDFAnonymous KhhapQJVYtNo ratings yet
- System ModelingDocument9 pagesSystem ModelingFyaNo ratings yet
- Math 2Document11 pagesMath 2Anonymous UrzdtCB0INo ratings yet
- Prof. Eisa Bashier M.Tayeb 2021: Control System StabilityDocument10 pagesProf. Eisa Bashier M.Tayeb 2021: Control System StabilityOsama AlzakyNo ratings yet
- « Introduction to Biomedical Engineering»: СourseDocument5 pages« Introduction to Biomedical Engineering»: СourseEbrahim Abd El HadyNo ratings yet
- Control Systems NotesDocument50 pagesControl Systems NotesEEE CRRNo ratings yet
- Control System Viva QuestionDocument13 pagesControl System Viva QuestionMasudur RahmanNo ratings yet
- NonLinSys NSJ MCTDocument19 pagesNonLinSys NSJ MCTshiwapreetheeNo ratings yet
- Modul 3 Mathematical Modeling of Dynamic SystemsDocument12 pagesModul 3 Mathematical Modeling of Dynamic SystemsGiraldo SihombingNo ratings yet
- End-Effector Trajectory Tracking in Flexible Arms Comparison of Approaches Based On Regulation TheoryDocument17 pagesEnd-Effector Trajectory Tracking in Flexible Arms Comparison of Approaches Based On Regulation Theoryoscar201140No ratings yet
- Control TheoryDocument12 pagesControl TheorymCmAlNo ratings yet
- Stability Analysis Systems by Lyapunov's Direct Method: of PowerDocument5 pagesStability Analysis Systems by Lyapunov's Direct Method: of Powersreekantha2013No ratings yet
- Industrial Control Chapter 1Document19 pagesIndustrial Control Chapter 1Qayyum AqasyahNo ratings yet
- Week 7B - Online Classes - S2020Document21 pagesWeek 7B - Online Classes - S2020Muhammad Tayyab YousafzaiNo ratings yet
- 191ECC302T CSE 2 Marks With Answer-2022Document14 pages191ECC302T CSE 2 Marks With Answer-2022Senthilkumar PandianNo ratings yet
- Mathematical Modeling of Control SystemDocument31 pagesMathematical Modeling of Control SystemMegiNo ratings yet
- The Concept of Stability 1Document3 pagesThe Concept of Stability 1Geoffrey OdhiamboNo ratings yet
- Control TheoryDocument11 pagesControl TheorySyedAhsanKamalNo ratings yet
- Simulink Basics TutorialDocument143 pagesSimulink Basics TutorialHiếu HuỳnhNo ratings yet
- OCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFDocument100 pagesOCW - Control Systems - I (EE 503) - AY 2016-17 - 2017-18 PDFCiczmockingbird TsvkAdm100% (1)
- Develop Systems With Stability (INF 5) FINALDocument7 pagesDevelop Systems With Stability (INF 5) FINALEmmanuel David Beltran RodriguezNo ratings yet
- Chapter 4 ControlDocument44 pagesChapter 4 ControlFootball HDNo ratings yet
- Optimal Control of Nonlinear Systems To Given OrbitsDocument14 pagesOptimal Control of Nonlinear Systems To Given OrbitsMi Đỗ Hoàng NgânNo ratings yet
- Transient and Steady State Response Analysis: Module - 3Document22 pagesTransient and Steady State Response Analysis: Module - 3Rajath UpadhyaNo ratings yet
- 2.maths - Ijms - Nonlinear - Sundaram RDocument8 pages2.maths - Ijms - Nonlinear - Sundaram Riaset123No ratings yet
- AppendixDocument16 pagesAppendixSushant YadavNo ratings yet
- Chapter 7 Buku NelsonDocument6 pagesChapter 7 Buku Nelsoncatia asdosNo ratings yet
- Control SystemlDocument44 pagesControl SystemlSolid Work and Mechanical software TutorialNo ratings yet
- Approximate Input-Output Linearization ofDocument6 pagesApproximate Input-Output Linearization ofzamzuri_rashidNo ratings yet
- Passivity, Feedback Equivalence, and The Global Stabilization of Minimum Phase Nonlinear SystemsDocument13 pagesPassivity, Feedback Equivalence, and The Global Stabilization of Minimum Phase Nonlinear SystemsgusalemanNo ratings yet
- Analysis of Oscillations With Eigenanalysis andDocument8 pagesAnalysis of Oscillations With Eigenanalysis andMadhusudhan SrinivasanNo ratings yet
- Mecht 4Document6 pagesMecht 4YoungneticNo ratings yet
- A Separation Principle For A Class of Non-UCO SystemsDocument12 pagesA Separation Principle For A Class of Non-UCO SystemsleruriNo ratings yet
- Annie StabDocument6 pagesAnnie StabAnshul SharmaNo ratings yet
- EEN-305 Advanced Control Systems Lab ReportDocument16 pagesEEN-305 Advanced Control Systems Lab ReportRitik MathurNo ratings yet
- A Novel Approach To Transient Stability Using Stochastic Energy Functions Suitable For Power System Risk AssessmentDocument8 pagesA Novel Approach To Transient Stability Using Stochastic Energy Functions Suitable For Power System Risk AssessmenttheijesNo ratings yet
- Saber PhdthesisDocument307 pagesSaber PhdthesisszepesvaNo ratings yet
- Control and Instrumentation: AssignmentDocument36 pagesControl and Instrumentation: AssignmentMuhammad FaizanNo ratings yet
- Experiment 1 AIM: Absolute Stability, Relative Stability, and Steady-State ErrorDocument8 pagesExperiment 1 AIM: Absolute Stability, Relative Stability, and Steady-State ErrorSaranshNo ratings yet
- Biomedical Control SystemsDocument3 pagesBiomedical Control SystemsNoor AhmedNo ratings yet
- Introduction To Linear and Nonlinear ObserversDocument51 pagesIntroduction To Linear and Nonlinear ObserversBarış ÖzNo ratings yet
- mmr03 CdsDocument79 pagesmmr03 Cds李默然No ratings yet
- Introduction To Non Linear SystemDocument34 pagesIntroduction To Non Linear SystemAnonymous 5DAuRtNo ratings yet
- Research Article: Impulsive Controllability/Observability For Interconnected Descriptor Systems With Two SubsystemsDocument15 pagesResearch Article: Impulsive Controllability/Observability For Interconnected Descriptor Systems With Two SubsystemsKawthar ZaidanNo ratings yet
- Neural Network Adaptive Control For A Class of Nonlinear Uncertain Dynamical Systems With Asymptotic Stability GuaranteesDocument10 pagesNeural Network Adaptive Control For A Class of Nonlinear Uncertain Dynamical Systems With Asymptotic Stability GuaranteesRyan DuttNo ratings yet
- Software Requirements Specification TemplateDocument6 pagesSoftware Requirements Specification TemplatekkrrrsssNo ratings yet
- Dissolving Clouds With Your MindDocument14 pagesDissolving Clouds With Your MindTamajong Tamajong PhilipNo ratings yet
- Journal of Building Information Modeling - Fall 2010Document40 pagesJournal of Building Information Modeling - Fall 2010bimpireNo ratings yet
- B1 IF-Clauses IF006: WWW - English-Practice - atDocument2 pagesB1 IF-Clauses IF006: WWW - English-Practice - atAyeshaNo ratings yet
- More Success by Doing Less - The Art of DelegationDocument6 pagesMore Success by Doing Less - The Art of DelegationWendel RharaelNo ratings yet
- The Ethics of Consumer Protection & Marketing: Ecture YnopsisDocument6 pagesThe Ethics of Consumer Protection & Marketing: Ecture Ynopsiskuashask2No ratings yet
- Mom MF-1Document79 pagesMom MF-1AnbuNo ratings yet
- PIT Error Overview - ParetoDocument208 pagesPIT Error Overview - ParetoHariharan Yelomalei50% (2)
- CEBM Levels of Evidence Introduction 2.1Document3 pagesCEBM Levels of Evidence Introduction 2.1Anida SaNiia BecKzNo ratings yet
- Cognitive Psychology - Write-Up TemplateDocument5 pagesCognitive Psychology - Write-Up TemplateRedkraynNo ratings yet
- Information Current As of October 2008 Requirements Correspond To 2009-2010 CatalogDocument24 pagesInformation Current As of October 2008 Requirements Correspond To 2009-2010 Catalogpiqueen314No ratings yet
- 505xt 1 en PDFDocument242 pages505xt 1 en PDFSyed Mohammad NaveedNo ratings yet
- Breaking Into The Movies: Public Pedagogy and The Politics of FilmDocument10 pagesBreaking Into The Movies: Public Pedagogy and The Politics of FilmDouglasNo ratings yet
- Wessel 1984. The Agricultural Foundations of CivilizationDocument4 pagesWessel 1984. The Agricultural Foundations of CivilizationAndres Maria-ramirezNo ratings yet
- Codex Tapered Roller BearingsDocument4 pagesCodex Tapered Roller BearingsAnonymous Cpe6vcNo ratings yet
- Course On Fracture Mechanics - IIT RoparDocument248 pagesCourse On Fracture Mechanics - IIT RoparSumit BasuNo ratings yet
- Refrigeration and Air Conditioning Technology 8th Edition Tomczyk Test BankDocument14 pagesRefrigeration and Air Conditioning Technology 8th Edition Tomczyk Test Bankdavidphillipsmcyaqbeogf100% (29)
- Name: Course/year:: Micro Asia College of Science and TechnologyDocument3 pagesName: Course/year:: Micro Asia College of Science and TechnologyTrisTan DolojanNo ratings yet
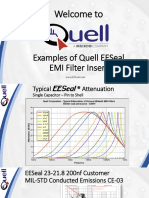
- Examples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsDocument15 pagesExamples of Quell's EESeal EMI Filter Inserts - MIL-STD-461 Test ResultsXto PeregrinNo ratings yet
- Documentation 040Document148 pagesDocumentation 040proxemicNo ratings yet
- Maximum Remaining - CodeChefDocument3 pagesMaximum Remaining - CodeChefShubhi SinghNo ratings yet
- Applying COCOMO II - A Case StudyDocument57 pagesApplying COCOMO II - A Case StudyMeghraj SapkotaNo ratings yet
- Virtual Earth SurveyDocument11 pagesVirtual Earth SurveyWenkatWenkatNo ratings yet