You might also like
- Curdev TestDocument4 pagesCurdev TestChoy CristobalNo ratings yet
- YouTube Video of Louise Ville 3 Area TourDocument1 pageYouTube Video of Louise Ville 3 Area TourChoy CristobalNo ratings yet
- Literal EquationsDocument13 pagesLiteral EquationsChoy CristobalNo ratings yet
- Curriculum Development: Professional EducationDocument42 pagesCurriculum Development: Professional EducationChoy CristobalNo ratings yet
- Cerebry RubricDocument1 pageCerebry RubricChoy CristobalNo ratings yet
- Cerebry RubricDocument1 pageCerebry RubricChoy CristobalNo ratings yet
- Term 2 Module 3 OverviewDocument1 pageTerm 2 Module 3 OverviewChoy CristobalNo ratings yet
- Antho ModelsDocument30 pagesAntho ModelsChoy CristobalNo ratings yet
- E-Learning in The Teaching of MathematicsDocument16 pagesE-Learning in The Teaching of MathematicsHB ChutorialNo ratings yet
- Study of The 5E Instructional Model To Improve The Instructional Design Process of Novice TeachersDocument11 pagesStudy of The 5E Instructional Model To Improve The Instructional Design Process of Novice TeachersDino DizonNo ratings yet
- Impact of Spiral Teaching On QuadraticsDocument8 pagesImpact of Spiral Teaching On QuadraticsChoy CristobalNo ratings yet
- Study On CPADocument14 pagesStudy On CPAChoy CristobalNo ratings yet
- Term 2 Module 3 OverviewDocument1 pageTerm 2 Module 3 OverviewChoy CristobalNo ratings yet
- Antho Models 2Document264 pagesAntho Models 2Choy CristobalNo ratings yet
- K-12 Mathematics and Science Curricula Lesson OverviewDocument2 pagesK-12 Mathematics and Science Curricula Lesson OverviewChoy CristobalNo ratings yet
- Synchronous Session 1: Synchronous Session 2:: Set Relationships Set OperationsDocument2 pagesSynchronous Session 1: Synchronous Session 2:: Set Relationships Set OperationsChoy CristobalNo ratings yet
- Curriculum Evaluation: Approaches and ModelsDocument10 pagesCurriculum Evaluation: Approaches and ModelsPhương Thảo NguyễnNo ratings yet
- Synchronous Session 1: Synchronous Session 2: Problem-Solving SADocument2 pagesSynchronous Session 1: Synchronous Session 2: Problem-Solving SAChoy CristobalNo ratings yet
- Synchronous Session 1: Synchronous Session 2:: Asynchronous Activities Set RelationshipsDocument3 pagesSynchronous Session 1: Synchronous Session 2:: Asynchronous Activities Set RelationshipsChoy CristobalNo ratings yet
- KAP5122 Collaborative Brief Covid19 Slide APR20 FWDocument7 pagesKAP5122 Collaborative Brief Covid19 Slide APR20 FWKatu PortlandNo ratings yet
- The Challenge of Implementing Mother Tongue Education in Linguistically Diverse Contexts - 2016Document10 pagesThe Challenge of Implementing Mother Tongue Education in Linguistically Diverse Contexts - 2016Choy CristobalNo ratings yet
- Synchronous Session 1: Synchronous Session 2Document2 pagesSynchronous Session 1: Synchronous Session 2Choy CristobalNo ratings yet
- Remote Learning:: Rapid Evidence AssessmentDocument29 pagesRemote Learning:: Rapid Evidence AssessmentBenYoussefAmineNo ratings yet
- Whole Numbers, Fractions, Mixed Numbers (Operations)Document1 pageWhole Numbers, Fractions, Mixed Numbers (Operations)Choy CristobalNo ratings yet
- Sequences and SeriesDocument34 pagesSequences and SeriesChoy CristobalNo ratings yet
- Amplify Education (2015)Document16 pagesAmplify Education (2015)Choy CristobalNo ratings yet
- Students' Perceptions of Learning Mode in MathematicsDocument10 pagesStudents' Perceptions of Learning Mode in MathematicsChoy CristobalNo ratings yet
- NC2ML (2018)Document7 pagesNC2ML (2018)Choy CristobalNo ratings yet
- PROPOSAL For SY 2019 - 2020: Power Sheets OBJECTIVES. The Power Sheet Activity Intends ToDocument1 pagePROPOSAL For SY 2019 - 2020: Power Sheets OBJECTIVES. The Power Sheet Activity Intends ToChoy CristobalNo ratings yet
- Compound InterestDocument24 pagesCompound InterestsilNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- GATE EE 2002 Actual Paper PDFDocument24 pagesGATE EE 2002 Actual Paper PDFKeilla Romabiles LeopandoNo ratings yet
- M.E. Comm. SystemsDocument105 pagesM.E. Comm. SystemsShobana SNo ratings yet
- Please Cite This Paper Rather Than This Web Page If You Use The Macro in Research You Are PublishingDocument3 pagesPlease Cite This Paper Rather Than This Web Page If You Use The Macro in Research You Are PublishingVic KeyNo ratings yet
- Tableau - Online MaterialDocument1,167 pagesTableau - Online MaterialGaneshNo ratings yet
- NPN Transistor Tutorial - The Bipolar NPN TransistorDocument14 pagesNPN Transistor Tutorial - The Bipolar NPN TransistorashmigeorgeNo ratings yet
- Manzana Insurance - Fruitvale BranchDocument10 pagesManzana Insurance - Fruitvale Branchankit_dadesiNo ratings yet
- 2020 McosmosDocument12 pages2020 McosmosRaquel RochaNo ratings yet
- Spectradaq-200 Is A Precision Data Acquisition Sound Card Optimized For Test and MeasurementDocument2 pagesSpectradaq-200 Is A Precision Data Acquisition Sound Card Optimized For Test and MeasurementMounicaRasagyaPallaNo ratings yet
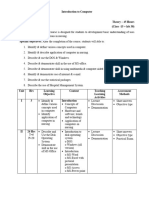
- ComputerDocument2 pagesComputerjohnNo ratings yet
- 4 Breakout, Technical Analysis ScannerDocument4 pages4 Breakout, Technical Analysis ScannerDeepak KansalNo ratings yet
- Rubric For Resume and Cover LetterDocument1 pageRubric For Resume and Cover LetterJasmine El-Jourbagy JerniganNo ratings yet
- Mit AcpuDocument30 pagesMit AcpuThanhtung DangNo ratings yet
- Kevin Chou ResumeDocument1 pageKevin Chou Resumeapi-472210762No ratings yet
- Chris Welman MSCDocument84 pagesChris Welman MSCPablo Angel ToiaNo ratings yet
- NRF52 Online Power ProfilerDocument6 pagesNRF52 Online Power Profilerzhongkai chengNo ratings yet
- Bts3911e&Wifi InfoDocument3 pagesBts3911e&Wifi InfoadilNo ratings yet
- Prosafe Rs Maintenance Training: Course #9001Document2 pagesProsafe Rs Maintenance Training: Course #9001daviqueirozdemedeirosNo ratings yet
- WinCC WebNavigator en-US en-USDocument160 pagesWinCC WebNavigator en-US en-USzuda.ahamdNo ratings yet
- Pepper FryDocument17 pagesPepper FryAditi GoenkaNo ratings yet
- Z ScoresDocument27 pagesZ ScoresSoma San JoseNo ratings yet
- WT60 Spare PartsDocument11 pagesWT60 Spare PartsimedNo ratings yet
- Einhell BC-BG 43 AsDocument16 pagesEinhell BC-BG 43 AsCristiana LaviniaNo ratings yet
- Exam Student HSC 90 Percen Le Student Download Old Data Candidate ListDocument1 pageExam Student HSC 90 Percen Le Student Download Old Data Candidate ListKrishnaVyasNo ratings yet
- Intellectual Property Litigation Risk ReportDocument24 pagesIntellectual Property Litigation Risk ReportPankaj GargNo ratings yet
- Manuale RDC - ENDocument45 pagesManuale RDC - ENYiannis SteletarisNo ratings yet
- Conputer Care and MaintenanceDocument30 pagesConputer Care and MaintenanceAmanya PatieNo ratings yet
- Business Analytics and Big Data OutlineDocument4 pagesBusiness Analytics and Big Data OutlineCream FamilyNo ratings yet
- Sunil Chandra: Career ObjectiveDocument3 pagesSunil Chandra: Career ObjectiveAnonymous yGyIJSNo ratings yet
- Clickshare Conference Brochure Digi Version EN PDFDocument11 pagesClickshare Conference Brochure Digi Version EN PDFBomber BeatNo ratings yet
- 2) VRP Basic ConfigurationDocument37 pages2) VRP Basic ConfigurationRandy DookheranNo ratings yet