You might also like
- Design of Speaker Cabinets PDFDocument51 pagesDesign of Speaker Cabinets PDFHeitor Penna100% (2)
- Baxandall Tone Controls - Elliott Sound (Org)Document13 pagesBaxandall Tone Controls - Elliott Sound (Org)nui338100% (1)
- Gilbert, G. - Technical FlexibiltyDocument22 pagesGilbert, G. - Technical FlexibiltyJoãoFerreira100% (1)
- SSL4000 E-Channel ManualDocument8 pagesSSL4000 E-Channel Manualalq10No ratings yet
- HotFET Pre J-FET Audio Preamplifier SchematicsDocument6 pagesHotFET Pre J-FET Audio Preamplifier SchematicsJefri ErlanggaNo ratings yet
- LoudspeakerDocument55 pagesLoudspeakerrajeshNo ratings yet
- HowSpeakersWork (Web)Document20 pagesHowSpeakersWork (Web)pavithrasekarme100% (1)
- T9 Loudspeakers: Chapter - 3Document29 pagesT9 Loudspeakers: Chapter - 3lvsaru100% (1)
- MusicalTheatreSyllabus FINALDocument3 pagesMusicalTheatreSyllabus FINALlskerponfblaNo ratings yet
- Speaker Crossover LabDocument51 pagesSpeaker Crossover LabRoland HendriksNo ratings yet
- VVR2Document15 pagesVVR2Guitar RoomNo ratings yet
- Eric Roche 1999 (Prince)Document6 pagesEric Roche 1999 (Prince)BP100% (2)
- Transformer Articles From Audio EngineeringDocument12 pagesTransformer Articles From Audio EngineeringXefNedNo ratings yet
- Class D Amplifiers - Interactive SimulationsDocument5 pagesClass D Amplifiers - Interactive SimulationsCristi BondNo ratings yet
- Aes V52 11 All PDFDocument92 pagesAes V52 11 All PDFtimosp1973No ratings yet
- LineArrays WhitePaperDocument14 pagesLineArrays WhitePaperAlenMomirovićNo ratings yet
- A Review of Digital Techniques For Modeling Vacuum-Tube Guitar AmplifiersDocument16 pagesA Review of Digital Techniques For Modeling Vacuum-Tube Guitar AmplifiersΔημήτρης ΓκρίντζοςNo ratings yet
- Fender Blues Junior Owner's ManualDocument4 pagesFender Blues Junior Owner's ManualzczcjunkNo ratings yet
- Output Transformer Design and WindingDocument12 pagesOutput Transformer Design and WindingAnonymous vKD3FG6Rk100% (1)
- Electronique - Audio - Amplifier Vacuum Tube Circuits and EquationsDocument7 pagesElectronique - Audio - Amplifier Vacuum Tube Circuits and EquationskoukihamedNo ratings yet
- A Taste of Tubes - The Connoisseur's Cookbook - 1997, 67pDocument67 pagesA Taste of Tubes - The Connoisseur's Cookbook - 1997, 67pEMVSNo ratings yet
- Impedance in Audio Lundahl TransformerDocument6 pagesImpedance in Audio Lundahl TransformerVũThậpNo ratings yet
- EL34 PP AmpDocument5 pagesEL34 PP AmpVasilis TsekourasNo ratings yet
- Reverberation AlgorithmsDocument123 pagesReverberation AlgorithmsFederico ScalasNo ratings yet
- VC SlopeDocument8 pagesVC SlopeEzKeezENo ratings yet
- Thomas F. DeFrantz - The Black Beat Made Visible - Hip Hop Dance and Body Power (Imprimir) PDFDocument23 pagesThomas F. DeFrantz - The Black Beat Made Visible - Hip Hop Dance and Body Power (Imprimir) PDFRodrigo P. BernardiNo ratings yet
- Neve BA283 Class A Gain-Stage Building Block For Preamps - Design Info Document2Document17 pagesNeve BA283 Class A Gain-Stage Building Block For Preamps - Design Info Document2crackintheshatNo ratings yet
- VocoderDocument72 pagesVocoderAnonymous ZnTTFwLENo ratings yet
- 12AU7-6111 Valve Caster SummaryDocument12 pages12AU7-6111 Valve Caster SummaryMichael Squier100% (1)
- Pultec HistoryDocument4 pagesPultec HistoryAndresGelvezNo ratings yet
- Narrow Band-Pass Filters for Low Frequency Applications: Evaluation of Eight Electronics Filter Design TopologiesFrom EverandNarrow Band-Pass Filters for Low Frequency Applications: Evaluation of Eight Electronics Filter Design TopologiesNo ratings yet
- LoudSpeaker Voice-Coil Inductance Losses - Circuit Models, Parameter Estimation and Effects On Frequency Response (W. Marshall Leach) PDFDocument8 pagesLoudSpeaker Voice-Coil Inductance Losses - Circuit Models, Parameter Estimation and Effects On Frequency Response (W. Marshall Leach) PDFVictor Hernandez MedinaNo ratings yet
- Briggs 1961 A To Z in AudioDocument225 pagesBriggs 1961 A To Z in AudioDragozmaj100% (1)
- The Impact of Bel Canto Principles On Vocal Beauty, Energy and HealthDocument8 pagesThe Impact of Bel Canto Principles On Vocal Beauty, Energy and HealthAnonymous J5vpGuNo ratings yet
- UntitledDocument3 pagesUntitledKwaku Boateng IsaacNo ratings yet
- MNXDocument8 pagesMNXPrabakaran BalaramanNo ratings yet
- Addition Number Six The Con'-Stant Di-Rec-Tiv'I-Ty White Horn White PaperDocument4 pagesAddition Number Six The Con'-Stant Di-Rec-Tiv'I-Ty White Horn White Paperjosiasns5257No ratings yet
- Ayurveda MD Panchakarma Academics DissertationDocument38 pagesAyurveda MD Panchakarma Academics DissertationManish KubawatNo ratings yet
- Visualization and Analysis of Loudspeaker VibrationDocument2 pagesVisualization and Analysis of Loudspeaker VibrationVenkatesan Thanigai ArasuNo ratings yet
- A Pedagogia de Vicente ScaramuzzaDocument55 pagesA Pedagogia de Vicente ScaramuzzaHelderCapuzzoNo ratings yet
- Transformers in The Audio and Sound Industries PDFDocument6 pagesTransformers in The Audio and Sound Industries PDFLogan WolffNo ratings yet
- Hall B QuartetDocument24 pagesHall B QuartetDillion NixonNo ratings yet
- Sound Systems in LondonDocument13 pagesSound Systems in LondonkateisobellNo ratings yet
- A Physical Model of The Classical Guitar, Including The Player's TouchDocument37 pagesA Physical Model of The Classical Guitar, Including The Player's TouchFernando Gea NavarroNo ratings yet
- Partitura Completa - SomethingDocument4 pagesPartitura Completa - SomethingLolo LopezNo ratings yet
- Tone ControlsDocument24 pagesTone Controlsdebass3No ratings yet
- Baxandall Tone ControlDocument7 pagesBaxandall Tone ControlSheeNo ratings yet
- Tubes Versus Transistors in Electric Guitar AmplifiersDocument6 pagesTubes Versus Transistors in Electric Guitar AmplifiersribarNo ratings yet
- The Jordan Loudspeaker Manual Chapter 6Document5 pagesThe Jordan Loudspeaker Manual Chapter 6Adam PaulNo ratings yet
- Loudspeaker As Musical InstrumentDocument13 pagesLoudspeaker As Musical InstrumentPhilippNo ratings yet
- Accutronics Reverb Part # Reference and Application NotesDocument6 pagesAccutronics Reverb Part # Reference and Application Notesrythmaccount100% (1)
- VWAC15 Push-Pull EL84 Guitar AmplifierDocument5 pagesVWAC15 Push-Pull EL84 Guitar Amplifiertihomiho100% (1)
- Analisis de Circuito Big MuffDocument10 pagesAnalisis de Circuito Big MuffNacho ConsolaniNo ratings yet
- Baxandall NegativeFeedbackToneDocument7 pagesBaxandall NegativeFeedbackTonemichaelbrendenNo ratings yet
- Altec Tranny MotionPicJournalDocument13 pagesAltec Tranny MotionPicJournalRobert GabrielNo ratings yet
- RIAA Preamps Part 2Document15 pagesRIAA Preamps Part 2cyclickbobNo ratings yet
- Arcadiator 2Document8 pagesArcadiator 2cesarjssNo ratings yet
- Loudspeaker Impedance With Sia Smaartlive: Paul D. HendersonDocument7 pagesLoudspeaker Impedance With Sia Smaartlive: Paul D. HendersonGabo CodornizNo ratings yet
- AES129 Designing Mic PreampsDocument66 pagesAES129 Designing Mic PreampsJohannes HerrmannNo ratings yet
- Mutual Coupling Between LoudspeakersDocument40 pagesMutual Coupling Between LoudspeakersDenys FormigaNo ratings yet
- Discretization of The '59 Fender Bassman Tone StackDocument5 pagesDiscretization of The '59 Fender Bassman Tone StackVadim DrokovNo ratings yet
- Meyer Line Array PDFDocument8 pagesMeyer Line Array PDFermb63No ratings yet
- Amplifier Audio Transistor Guitar Pre-Amp Circuit Simplest Operating Self BiasDocument2 pagesAmplifier Audio Transistor Guitar Pre-Amp Circuit Simplest Operating Self Biasdreyes2288No ratings yet
- Design of Ultra Low Noise AmplifiersDocument7 pagesDesign of Ultra Low Noise Amplifiersmax_orwellNo ratings yet
- RCA Receiving Tube Manual - Technical Series PC 16 - 1950, 340pDocument340 pagesRCA Receiving Tube Manual - Technical Series PC 16 - 1950, 340pEMVSNo ratings yet
- Parametric EQ - George Massenburg - 1972Document9 pagesParametric EQ - George Massenburg - 1972camt2112No ratings yet
- Chapter 5. Powered Subwoofer: BackgroundDocument5 pagesChapter 5. Powered Subwoofer: BackgroundblekstenaNo ratings yet
- State Variable CrossoverDocument6 pagesState Variable CrossoverECKO W (XcntrX)No ratings yet
- Evolution of An EQ Design2Document9 pagesEvolution of An EQ Design2atiqulaNo ratings yet
- DX Blame MKIII-Hx Updated July, 28th - 2011Document1 pageDX Blame MKIII-Hx Updated July, 28th - 2011Manish KubawatNo ratings yet
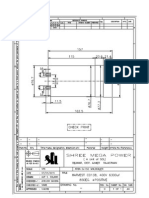
- HARVEST CD138, 400V 6300uf 7.01.2015-ModelDocument1 pageHARVEST CD138, 400V 6300uf 7.01.2015-ModelManish KubawatNo ratings yet
- Sara by Lixandru DorinDocument1 pageSara by Lixandru DorinManish KubawatNo ratings yet
- Ar 11Document1 pageAr 11Manish KubawatNo ratings yet
- Which Raw Loudspeaker Manufactor, Uses The Best Quality Parts - (Archive) - Wave Music Community BoardDocument6 pagesWhich Raw Loudspeaker Manufactor, Uses The Best Quality Parts - (Archive) - Wave Music Community BoardManish KubawatNo ratings yet
- Full Range Enclosure: 2x 15" Woofer - 15PLB76 8 Ohm 1.4" High Frequency Driver - DE82TN 8 Ohm 80°x60° 1.4" Horn - ME90Document6 pagesFull Range Enclosure: 2x 15" Woofer - 15PLB76 8 Ohm 1.4" High Frequency Driver - DE82TN 8 Ohm 80°x60° 1.4" Horn - ME90Manish KubawatNo ratings yet
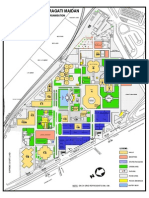
- Pragati Maidan Layout Map PDFDocument1 pagePragati Maidan Layout Map PDFManish KubawatNo ratings yet
- Book List of Indian AyurvedDocument6 pagesBook List of Indian AyurvedManish KubawatNo ratings yet
- Ba3880s Rohm RohmDocument10 pagesBa3880s Rohm RohmManish KubawatNo ratings yet
- Wonder, Love, & PraiseDocument3 pagesWonder, Love, & PraiseHazel GeronimoNo ratings yet
- Australian-Hifi Reviews 2011-05 To 12 2011-07 Yamaha As-700 Amplifier Review LoresDocument5 pagesAustralian-Hifi Reviews 2011-05 To 12 2011-07 Yamaha As-700 Amplifier Review Loresscipio66No ratings yet
- Adorno - Music and New MusicDocument13 pagesAdorno - Music and New Musicthomas zhangNo ratings yet
- Inquisition Symphony - LeadDocument10 pagesInquisition Symphony - LeadPao AckermanNo ratings yet
- Wilding TalesDocument5 pagesWilding TalesradvioletsNo ratings yet
- Renaissancce PDFDocument47 pagesRenaissancce PDFShivram VJNo ratings yet
- Language in Cinema PDFDocument42 pagesLanguage in Cinema PDFAshu PrakashNo ratings yet
- Muse Least Favorite Song in Each AlbumDocument4 pagesMuse Least Favorite Song in Each AlbumFitri Amirrol100% (1)
- Digital Booklet - The Spirit Room (Deluxe Edition)Document12 pagesDigital Booklet - The Spirit Room (Deluxe Edition)Mani ShadoWizNo ratings yet
- Emmy Frevele Dance ResumeDocument1 pageEmmy Frevele Dance Resumeapi-267655991No ratings yet
- Chega de SaudadeDocument3 pagesChega de SaudadeWallace Cavallari Romano de SouzaNo ratings yet
- Viva La Vida (Saxo Tenor)Document2 pagesViva La Vida (Saxo Tenor)Júlia Romero CorellaNo ratings yet
- 1 Great Writing U1 SuperDocument22 pages1 Great Writing U1 Superfahut.amaNo ratings yet
- Opcode OMS Studio Patches 1997Document114 pagesOpcode OMS Studio Patches 1997nifnifnafnafNo ratings yet
- Blues Guitar For Beginners - 7 ChordsDocument4 pagesBlues Guitar For Beginners - 7 ChordsIlija NikolicNo ratings yet
- At The EdgeDocument111 pagesAt The EdgeArtistsInTheKitchenNo ratings yet
- TwelveDocument2 pagesTwelveEvangelosNo ratings yet
- The History of The Philippines National Anthem and Flag: Lupang HinirangDocument2 pagesThe History of The Philippines National Anthem and Flag: Lupang HinirangEarlkenneth NavarroNo ratings yet
- Sones and PhonesDocument4 pagesSones and PhonesSchöberl ErichNo ratings yet
- MR Brightside Song BreakdownDocument4 pagesMR Brightside Song BreakdownSteven SwiftNo ratings yet
- UcmDocument2 pagesUcmgocoolonNo ratings yet