You might also like
- Beginning Windows Mixed Reality Programming: For HoloLens and Mixed Reality HeadsetsFrom EverandBeginning Windows Mixed Reality Programming: For HoloLens and Mixed Reality HeadsetsNo ratings yet
- FLEISCHMANN, Suzanne, On The Representation of History and Fiction in The Middle AgesDocument34 pagesFLEISCHMANN, Suzanne, On The Representation of History and Fiction in The Middle AgesAndrejka NováNo ratings yet
- Historical Texts As Symptoms of Crises: Si Monumentum Requiris, Circumspice"Document13 pagesHistorical Texts As Symptoms of Crises: Si Monumentum Requiris, Circumspice"EstefaniaNo ratings yet
- Immersion Into Virtual Reality: The perception of being physically present in a non-physical worldFrom EverandImmersion Into Virtual Reality: The perception of being physically present in a non-physical worldNo ratings yet
- Author's VoiceDocument33 pagesAuthor's VoiceAnonymous d5SioPTNo ratings yet
- Immersive Words: Mass Media, Visuality, and American Literature, 1839–1893From EverandImmersive Words: Mass Media, Visuality, and American Literature, 1839–1893No ratings yet
- Postdigital PerformanceDocument16 pagesPostdigital Performance'Leonard RentonNo ratings yet
- Corporeal Body in VRDocument29 pagesCorporeal Body in VRanamnesis232060No ratings yet
- A Manifesto For Ultratranslation AntenaDocument6 pagesA Manifesto For Ultratranslation AntenaMariana Camelio VezzaniNo ratings yet
- Immersive MultimediaDocument8 pagesImmersive Multimediaنور روسلنNo ratings yet
- The Immersive Internet: Make Tactical Moves Today For Strategic Advantage TomorrowDocument22 pagesThe Immersive Internet: Make Tactical Moves Today For Strategic Advantage TomorrowRussell W. RobbinsNo ratings yet
- Euphoria and Dystopia: The Banff New Media Institute DialoguesFrom EverandEuphoria and Dystopia: The Banff New Media Institute DialoguesNo ratings yet
- The Essay On Stage: Singularity and PerformativityDocument15 pagesThe Essay On Stage: Singularity and PerformativitySlovensko Mladinsko Gledališče ProfilNo ratings yet
- Immersive Multimedia: CelcomDocument8 pagesImmersive Multimedia: CelcomAzymaNo ratings yet
- Beyond the Screen: Transformations of Literary Structures, Interfaces and GenresFrom EverandBeyond the Screen: Transformations of Literary Structures, Interfaces and GenresJörgen SchäferNo ratings yet
- Dedicated To My: Alma MaterDocument18 pagesDedicated To My: Alma MaterAntaryami DasNo ratings yet
- 1950s - Morton Heilig's SensoramaDocument16 pages1950s - Morton Heilig's Sensoramarirc23No ratings yet
- City of BitsDocument143 pagesCity of Bitstsara_tNo ratings yet
- VR The World Experimenting With Emotion and PresenceDocument12 pagesVR The World Experimenting With Emotion and PresenceTrang MarbleNo ratings yet
- Image Contact Haptic Actions in Virtual SpacesDocument19 pagesImage Contact Haptic Actions in Virtual SpacesYu ChenNo ratings yet
- Technoculture in Global PerspectiveDocument2 pagesTechnoculture in Global PerspectiveIce PrincessNo ratings yet
- Slater and Wilbur - A Framework For Immersive Virtual Environments (FIVE) 1997Document20 pagesSlater and Wilbur - A Framework For Immersive Virtual Environments (FIVE) 1997Karl MickeiNo ratings yet
- Sociology of Virtual RealityDocument10 pagesSociology of Virtual RealityAbdullah Rahim Roman100% (1)
- Alain Badiou Elie During Teatre EngDocument6 pagesAlain Badiou Elie During Teatre EngDorota Jagoda MichalskaNo ratings yet
- Siggraph 01 ShrekDocument108 pagesSiggraph 01 Shrekkomet01No ratings yet
- Augmented Reality - Some Emerging Application AreasDocument280 pagesAugmented Reality - Some Emerging Application AreasViorel CroitoruNo ratings yet
- Practice Spatial AgencyDocument9 pagesPractice Spatial AgencyJacquelineNo ratings yet
- Diagramming NarrativeDocument30 pagesDiagramming NarrativeJéssica FigueiredoNo ratings yet
- Karen Verschooren, ".Art: Situating Internet Art in The Traditional Institution For Contemporary Art"Document202 pagesKaren Verschooren, ".Art: Situating Internet Art in The Traditional Institution For Contemporary Art"MIT Comparative Media Studies/WritingNo ratings yet
- Art and Virtual RealityDocument19 pagesArt and Virtual Realityshenlong8272No ratings yet
- Virtual Reality and Its Connection To Human PerceptionDocument15 pagesVirtual Reality and Its Connection To Human PerceptionJohn AcostaNo ratings yet
- Johannes FabianDocument152 pagesJohannes FabianMurilo GuimarãesNo ratings yet
- Gesture Based Interaction in Immersive Virtual RealityDocument5 pagesGesture Based Interaction in Immersive Virtual RealityEngineering and Scientific International JournalNo ratings yet
- Kyrie Caldwell, "Fake The Dawn: Digital Game Mechanics and The Construction of Gender in Fictional Worlds"Document153 pagesKyrie Caldwell, "Fake The Dawn: Digital Game Mechanics and The Construction of Gender in Fictional Worlds"MIT Comparative Media Studies/WritingNo ratings yet
- Of Semiotics in Performance TheoryDocument9 pagesOf Semiotics in Performance TheorySue MohdNo ratings yet
- Art and Robotics: Sixty Years of Situated MachinesDocument10 pagesArt and Robotics: Sixty Years of Situated MachinesSysy AlsNo ratings yet
- OSE - Annual Report - 2012Document29 pagesOSE - Annual Report - 2012Amakaruk01No ratings yet
- Dourish 1999Document16 pagesDourish 1999Soonwook ChoiNo ratings yet
- Virtual BodiesDocument4 pagesVirtual BodiesGuilherme MayerNo ratings yet
- Tom Gunning - Illusions Past and Future (Phantasmagoria)Document17 pagesTom Gunning - Illusions Past and Future (Phantasmagoria)lapaupierenoireNo ratings yet
- (New Directions in Cultural Policy Research) Bjarki Valtysson - Digital Cultural Politics - From Policy To Practice-Palgrave Macmillan (2020)Document229 pages(New Directions in Cultural Policy Research) Bjarki Valtysson - Digital Cultural Politics - From Policy To Practice-Palgrave Macmillan (2020)Sebastian100% (1)
- Murray - Transcending Transmedia Emerging Story Telling Structures For The Emerging Convergence Platforms - 2012 PDFDocument5 pagesMurray - Transcending Transmedia Emerging Story Telling Structures For The Emerging Convergence Platforms - 2012 PDFSantiago MontielNo ratings yet
- Digital and Postdigital 3D Animation in PDFDocument17 pagesDigital and Postdigital 3D Animation in PDFflaneur7No ratings yet
- Telematic Embrace: A Love Story? // Roy Ascott's Theories of Telematic ArtDocument15 pagesTelematic Embrace: A Love Story? // Roy Ascott's Theories of Telematic ArtEvelineRoelsNo ratings yet
- From Cinema To Virtual Reality. A Phenomenological Approach To The Experience of Immersive DocumentariesDocument68 pagesFrom Cinema To Virtual Reality. A Phenomenological Approach To The Experience of Immersive DocumentariesManuel BarrionuevoNo ratings yet
- Perfomitivity Meets TheatricalityDocument3 pagesPerfomitivity Meets TheatricalityPNRNo ratings yet
- DENA TransmediaPracticeDocument374 pagesDENA TransmediaPracticeBerta Gomez100% (1)
- 3D Cinema-Optical Illusions and Tactile Experiences (Miriam Ross, 2015)Document237 pages3D Cinema-Optical Illusions and Tactile Experiences (Miriam Ross, 2015)antonio abadNo ratings yet
- 2010 - Manifesto HDDocument1 page2010 - Manifesto HDClaudeci Martins da SilvaNo ratings yet
- Simulation & Gaming: Applying A Phenomenological Approach To Games Analysis: A Case StudyDocument18 pagesSimulation & Gaming: Applying A Phenomenological Approach To Games Analysis: A Case StudyIza BelaNo ratings yet
- The Social Smart ContractDocument27 pagesThe Social Smart ContractCésar G. Rincón GonzálezNo ratings yet
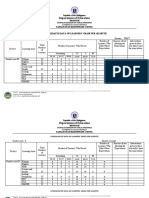
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDocument4 pagesDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaNo ratings yet
- School Based Management Contextualized Self Assessment and Validation Tool Region 3Document29 pagesSchool Based Management Contextualized Self Assessment and Validation Tool Region 3Felisa AndamonNo ratings yet
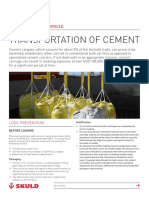
- Transportation of CementDocument13 pagesTransportation of CementKaustubh Joshi100% (1)
- EPW, Vol.58, Issue No.44, 04 Nov 2023Document66 pagesEPW, Vol.58, Issue No.44, 04 Nov 2023akashupscmadeeaseNo ratings yet
- Aashto M288-17 Product Selection GuideDocument1 pageAashto M288-17 Product Selection GuideDem DemNo ratings yet
- Sim Uge1Document62 pagesSim Uge1ALLIAH NICHOLE SEPADANo ratings yet
- Control ValvesDocument95 pagesControl ValvesHardik Acharya100% (1)
- Project Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesDocument12 pagesProject Name: Repair of Afam Vi Boiler (HRSG) Evaporator TubesLeann WeaverNo ratings yet
- Analisis Kebutuhan Bahan Ajar Berbasis EDocument9 pagesAnalisis Kebutuhan Bahan Ajar Berbasis ENur Hanisah AiniNo ratings yet
- Probation Period ReportDocument17 pagesProbation Period ReportMiranti Puspitasari0% (1)
- Sony x300 ManualDocument8 pagesSony x300 ManualMarcosCanforaNo ratings yet
- Mahindra&mahindraDocument95 pagesMahindra&mahindraAshik R GowdaNo ratings yet
- RH-A Catalog PDFDocument1 pageRH-A Catalog PDFAchmad KNo ratings yet
- Applications of Wireless Sensor Networks: An Up-to-Date SurveyDocument24 pagesApplications of Wireless Sensor Networks: An Up-to-Date SurveyFranco Di NataleNo ratings yet
- بتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Document5 pagesبتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Batool MagedNo ratings yet
- IPA Smith Osborne21632Document28 pagesIPA Smith Osborne21632johnrobertbilo.bertilloNo ratings yet
- Design ProjectDocument60 pagesDesign Projectmahesh warNo ratings yet
- Static Electrification: Standard Test Method ForDocument10 pagesStatic Electrification: Standard Test Method Forastewayb_964354182No ratings yet
- Stability Analysis of Geocell Reinforced Slopes by Considering Bending EffectDocument13 pagesStability Analysis of Geocell Reinforced Slopes by Considering Bending EffectRakesh KapoorNo ratings yet
- LG LFX31945 Refrigerator Service Manual MFL62188076 - Signature2 Brand DID PDFDocument95 pagesLG LFX31945 Refrigerator Service Manual MFL62188076 - Signature2 Brand DID PDFplasmapete71% (7)
- Plan Lectie Clasa 5 D HaineDocument5 pagesPlan Lectie Clasa 5 D HaineCristina GrapinoiuNo ratings yet
- Chakir Sara 2019Document25 pagesChakir Sara 2019hiba toubaliNo ratings yet
- Third Party Risk Management Solution - WebDocument16 pagesThird Party Risk Management Solution - Webpreenk8No ratings yet
- Electronic Diversity Visa ProgrambDocument1 pageElectronic Diversity Visa Programbsamkimari5No ratings yet
- Logistic RegressionDocument7 pagesLogistic RegressionShashank JainNo ratings yet
- MSDS Buffer Solution PH 4.0Document5 pagesMSDS Buffer Solution PH 4.0Ardhy LazuardyNo ratings yet
- How Transformers WorkDocument15 pagesHow Transformers Worktim schroderNo ratings yet
- 2.a.1.f v2 Active Matrix (AM) DTMC (Display Technology Milestone Chart)Document1 page2.a.1.f v2 Active Matrix (AM) DTMC (Display Technology Milestone Chart)matwan29No ratings yet
- Etag 002 PT 2 PDFDocument13 pagesEtag 002 PT 2 PDFRui RibeiroNo ratings yet
- My BaboogDocument1 pageMy BaboogMaral Habeshian VieiraNo ratings yet