You might also like
- UWorld Step 2 CK Notes - 2015Document4 pagesUWorld Step 2 CK Notes - 2015Ernesto Prado67% (3)
- Chapter 9 CARDIOVASCULAR SYSTEMDocument21 pagesChapter 9 CARDIOVASCULAR SYSTEMAlexander Santiago ParelNo ratings yet
- Physiology: by Dr. Mayur SaytaDocument141 pagesPhysiology: by Dr. Mayur Sayta182 ROHIL H100% (1)
- Cardiovascular and Pulmonary Physical Therapy Evidence To Practice 5th Edition Frownfelter Test BankDocument25 pagesCardiovascular and Pulmonary Physical Therapy Evidence To Practice 5th Edition Frownfelter Test BankTaraThomasdwbz100% (61)
- Perinatal Asphyxia - Outline of Pathophysiology and Recent Trends in ManagementDocument31 pagesPerinatal Asphyxia - Outline of Pathophysiology and Recent Trends in Managementokwadha simionNo ratings yet
- plf2010 Poster FinalDocument1 pageplf2010 Poster Finalapi-217635923No ratings yet
- Stabilization of Neutral Systems With Saturating Control InputsDocument17 pagesStabilization of Neutral Systems With Saturating Control InputsMoh IneNo ratings yet
- Ghadeer Haider - Effect of Sampling Freq On Steady State ErrorDocument8 pagesGhadeer Haider - Effect of Sampling Freq On Steady State ErrorGhadeer HaiderNo ratings yet
- Time-Varying Effects and Averaging Issues in Models For Current-Mode ControlDocument9 pagesTime-Varying Effects and Averaging Issues in Models For Current-Mode ControlsamNo ratings yet
- 1 Merged 1620844101Document33 pages1 Merged 1620844101René Mboyo KouayepNo ratings yet
- Butterworth Pattern Based Simultaneous Damping and Tracking Controller Designs For Nanopositioning SystemsDocument6 pagesButterworth Pattern Based Simultaneous Damping and Tracking Controller Designs For Nanopositioning SystemsIra CervoNo ratings yet
- Experimental Evidence For Soliton Explosions: Olume UmberDocument4 pagesExperimental Evidence For Soliton Explosions: Olume UmberMaurício Vicente TavaresNo ratings yet
- Larger 2010Document3 pagesLarger 2010Farhan FarhanNo ratings yet
- Control of Power System OscillationsDocument9 pagesControl of Power System OscillationsgabriveragNo ratings yet
- Ultrasonics: Farouk Benmeddour, Sébastien Grondel, Jamal Assaad, Emmanuel MoulinDocument4 pagesUltrasonics: Farouk Benmeddour, Sébastien Grondel, Jamal Assaad, Emmanuel Moulin1r1n3uNo ratings yet
- Input Shaping Control of CranesDocument7 pagesInput Shaping Control of CranesMuhammad Auwal ShehuNo ratings yet
- Rate Models For Conductance-Based Cortical Neuronal NetworksDocument33 pagesRate Models For Conductance-Based Cortical Neuronal NetworksFrontiersNo ratings yet
- Survey of Scan Chain Diagnosis: Can-Based Testing HasDocument9 pagesSurvey of Scan Chain Diagnosis: Can-Based Testing HasrjnmsdNo ratings yet
- FLab-10 EXP10Document12 pagesFLab-10 EXP10Carl Kevin CartijanoNo ratings yet
- A Method For Synchronization of Power Electronic Converters in Polluted and Variable-Frequency EnvironmentsDocument8 pagesA Method For Synchronization of Power Electronic Converters in Polluted and Variable-Frequency Environmentsjuancho2222No ratings yet
- Freijedo, 2009Document14 pagesFreijedo, 2009EdsonNo ratings yet
- 2010 - Ahn&Longman - EXAMINING THE PROPERTIES OF THE WATERBED EFFECT IN SPACECRAFT DISTURBANCE REJECTION CONTROL SYSTEMS PDFDocument20 pages2010 - Ahn&Longman - EXAMINING THE PROPERTIES OF THE WATERBED EFFECT IN SPACECRAFT DISTURBANCE REJECTION CONTROL SYSTEMS PDFAyman IsmailNo ratings yet
- ! DISCRETE SW-Mod HysteresisDocument7 pages! DISCRETE SW-Mod HysteresisIonut DraganNo ratings yet
- Distributed Interleaving of Paralleled Power Converters: David J. Perreault,, and John G. KassakianDocument7 pagesDistributed Interleaving of Paralleled Power Converters: David J. Perreault,, and John G. KassakianVic PagolaNo ratings yet
- Abbott-Analysis of Neuron Models With Dynamically Regulated Conductances-1993-Neural ComputationDocument20 pagesAbbott-Analysis of Neuron Models With Dynamically Regulated Conductances-1993-Neural ComputationTioz1990No ratings yet
- Global Entrainment of Transcriptional Systems To Periodic InputsDocument26 pagesGlobal Entrainment of Transcriptional Systems To Periodic InputsYAAKOV SOLOMONNo ratings yet
- Vu Et Al-2017-Structural Control and Health MonitoringDocument18 pagesVu Et Al-2017-Structural Control and Health Monitoringchuanxd52No ratings yet
- Chaotic Oscillator Based Protection Scheme For Single Phase in DistributionDocument4 pagesChaotic Oscillator Based Protection Scheme For Single Phase in Distributionharis malikNo ratings yet
- Adaptive Inverse Control of Linear and Nonlinear Systems Using Dynamic Neural NetworksDocument17 pagesAdaptive Inverse Control of Linear and Nonlinear Systems Using Dynamic Neural NetworkswielnigNo ratings yet
- ManuscriptDocument9 pagesManuscriptCélio MarquesNo ratings yet
- Impedance Spectroscopy and Experimental SetupDocument18 pagesImpedance Spectroscopy and Experimental SetupJako SibueaNo ratings yet
- Yoder-IWSHM 2009Document10 pagesYoder-IWSHM 2009Nathan SharpNo ratings yet
- Elimination of Resonance in Electric DriveDocument5 pagesElimination of Resonance in Electric DrivessemwalNo ratings yet
- Experimental Studies of Circuit Breaker Drives and Mechanisms DiagnosticsDocument5 pagesExperimental Studies of Circuit Breaker Drives and Mechanisms DiagnosticsMyla LastNo ratings yet
- Tutorial 8 PDFDocument1 pageTutorial 8 PDFEmEmTantengcoNo ratings yet
- Evaluation of (Unstable) Non-Causal Systems Applied To Iterative Learning ControlDocument10 pagesEvaluation of (Unstable) Non-Causal Systems Applied To Iterative Learning ControlSandeep RaiNo ratings yet
- Dynamical Compensation in Physiological Circuits: Omer Karin, Avital Swisa, Benjamin Glaser, Yuval Dor & Uri AlonDocument7 pagesDynamical Compensation in Physiological Circuits: Omer Karin, Avital Swisa, Benjamin Glaser, Yuval Dor & Uri AlonFrancisco Vicent PachecoNo ratings yet
- Neurotransmission, Measuring Chemical Events In: Advanced ArticleDocument12 pagesNeurotransmission, Measuring Chemical Events In: Advanced ArticleazzaassNo ratings yet
- Methods For Monitoring Cellular Motion and FunctionDocument4 pagesMethods For Monitoring Cellular Motion and FunctionDiogo MoreiraNo ratings yet
- Electrophysiological Recording Techniques PDFDocument7 pagesElectrophysiological Recording Techniques PDFAndrei TatomirNo ratings yet
- Sampled-Data Regulation of A Class of Time Varying Systems Based On A Realizable Reconstruction FilterDocument6 pagesSampled-Data Regulation of A Class of Time Varying Systems Based On A Realizable Reconstruction FilterIbraheem ZebNo ratings yet
- Chaos FTDocument41 pagesChaos FTWali UllahNo ratings yet
- 1672 6340 (2012) 01 0007 08 PDFDocument6 pages1672 6340 (2012) 01 0007 08 PDFbacuoc.nguyen356No ratings yet
- Disturbance Rejection Through LPV Gain-Scheduling Control With Application To Active Noise CancellationDocument6 pagesDisturbance Rejection Through LPV Gain-Scheduling Control With Application To Active Noise CancellationAuliaNo ratings yet
- Complex Bioelectric ImpedDocument12 pagesComplex Bioelectric ImpedcazacuphNo ratings yet
- Adaptive Feedforward Cancellation of Sinusoidal Disturbances in Superconducting RF CavitiesDocument7 pagesAdaptive Feedforward Cancellation of Sinusoidal Disturbances in Superconducting RF CavitiesEsiNo ratings yet
- Neural Noise Induces The Evolution of Robust Behaviour by Avoiding Non-Functional BifurcationsDocument10 pagesNeural Noise Induces The Evolution of Robust Behaviour by Avoiding Non-Functional Bifurcationsjosef_151No ratings yet
- Pipeline Leak Detection System in A Palm Oil Fractionation Plant Using Artificial Neural NetworkDocument8 pagesPipeline Leak Detection System in A Palm Oil Fractionation Plant Using Artificial Neural NetworkAhmed S. El DenNo ratings yet
- Analysis of Inter-Area Oscillations Via Non-Linear Time Series Analysis TechniquesDocument7 pagesAnalysis of Inter-Area Oscillations Via Non-Linear Time Series Analysis Techniquespramod_bhatt68868No ratings yet
- Chemical Kinetics in Biology: GoalsDocument28 pagesChemical Kinetics in Biology: GoalsDrJayasimha GoudNo ratings yet
- Camera Ready IJE-217 PDFDocument12 pagesCamera Ready IJE-217 PDFGlan DevadhasNo ratings yet
- Chaotic Oscillations in Delayed-Feedback Electronic OscillatorsDocument5 pagesChaotic Oscillations in Delayed-Feedback Electronic OscillatorsGeraud Russel Goune ChenguiNo ratings yet
- Smart MaterialsDocument61 pagesSmart MaterialsMadhusudhanan ChelliahNo ratings yet
- Automatica05 KhalilDocument12 pagesAutomatica05 KhalileseosapaulNo ratings yet
- A Fundamental Study Inter-Area Oscillations Power SystemsDocument8 pagesA Fundamental Study Inter-Area Oscillations Power SystemsLuis MuñozNo ratings yet
- Fuzzy Range Sensor Filtering For Reactive Autonomous RobotsDocument4 pagesFuzzy Range Sensor Filtering For Reactive Autonomous Robotsأسد عليNo ratings yet
- Power Quality Analysis Using An Adaptive Decomposition StructureDocument5 pagesPower Quality Analysis Using An Adaptive Decomposition StructureZahira Javed RNo ratings yet
- The Costas Loop - An Introduction: by Eric HagemannDocument5 pagesThe Costas Loop - An Introduction: by Eric Hagemannm0hmdNo ratings yet
- Flow Calcium Kinetics Chapter15Document5 pagesFlow Calcium Kinetics Chapter15Marica GemeiNo ratings yet
- WGYChaotic OscillatorDocument6 pagesWGYChaotic OscillatorjuanNo ratings yet
- Visveshwaraiah Technological University Belgaum: KNS Institute of Technology, BengaluruDocument24 pagesVisveshwaraiah Technological University Belgaum: KNS Institute of Technology, BengalururudrappaNo ratings yet
- Phase Locked Loop System For FACTS: Dragan Jovcic, Member, IEEEDocument8 pagesPhase Locked Loop System For FACTS: Dragan Jovcic, Member, IEEEPakde ZoelfaNo ratings yet
- PosterDocument1 pagePosterapi-250322840No ratings yet
- Computational NeuroendocrinologyFrom EverandComputational NeuroendocrinologyDuncan J. MacGregorNo ratings yet
- Anatomy of Root and StemDocument48 pagesAnatomy of Root and StemLIONS GAMERSNo ratings yet
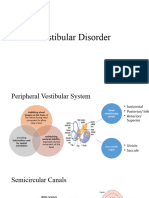
- Vestibular DisorderDocument22 pagesVestibular DisorderSumbal SalikNo ratings yet
- Neural Transmission: Chapter ThreeDocument1 pageNeural Transmission: Chapter ThreeBoitor ValerianNo ratings yet
- Introduction To ECG: Presenter: Emiacu Kenneth Facilitator: Dr. Ssebuliba MosesDocument36 pagesIntroduction To ECG: Presenter: Emiacu Kenneth Facilitator: Dr. Ssebuliba MosesNinaNo ratings yet
- Mitral Valve ProlapseDocument6 pagesMitral Valve ProlapseMary Joy FrancoNo ratings yet
- Lesson 5 ECG BiopacDocument6 pagesLesson 5 ECG BiopacJavier VeintimillaNo ratings yet
- Chapter - 13 - Cardiovascular - Responses - Exercise Physiology For Health Fitness and PerformanceDocument32 pagesChapter - 13 - Cardiovascular - Responses - Exercise Physiology For Health Fitness and Performanceec16043No ratings yet
- 14-11-22 Malam Dr. YolaDocument6 pages14-11-22 Malam Dr. YolabobynandaNo ratings yet
- MD-7 HearttDocument28 pagesMD-7 HearttvincenzoNo ratings yet
- Double Circulation in Humans WorksheetDocument2 pagesDouble Circulation in Humans WorksheetKliemmah PeltierNo ratings yet
- VVIR Vs DDDRDocument2 pagesVVIR Vs DDDRNITACORDEIRONo ratings yet
- Heart Pump and Cardiac Cycle: Faisal I. Mohammed, MD, PHDDocument41 pagesHeart Pump and Cardiac Cycle: Faisal I. Mohammed, MD, PHDUsama SadiqNo ratings yet
- ML009 - RevJ - NCP Operator Training (NCP-5) - Jun2018Document84 pagesML009 - RevJ - NCP Operator Training (NCP-5) - Jun2018alvin susetyoNo ratings yet
- Central and Peripheral Factors in FatigueDocument6 pagesCentral and Peripheral Factors in FatigueEduardo VieyraNo ratings yet
- KS3 Human Organ SystemDocument2 pagesKS3 Human Organ Systemejljn1No ratings yet
- Current Concepts of Damage Control Resuscitation and Damage Control SurgeryDocument52 pagesCurrent Concepts of Damage Control Resuscitation and Damage Control SurgerydewiswahyuNo ratings yet
- Aerobic Respiration Power PointDocument35 pagesAerobic Respiration Power PointJeremy WongNo ratings yet
- Introduction To Transfusion MedicineDocument12 pagesIntroduction To Transfusion MedicineSamantha BuiNo ratings yet
- Blood Vessels L2Document40 pagesBlood Vessels L2tas xoNo ratings yet
- Renal FailureDocument48 pagesRenal FailureCindy MamalangkasNo ratings yet
- Heat-Related IllnessDocument1 pageHeat-Related IllnessEdie OwensNo ratings yet
- Kimura Chapter 4Document66 pagesKimura Chapter 4Mio FaraoneNo ratings yet
- 31274220: Advances in Non-Invasive Positive Airway Pressure TechnologyDocument11 pages31274220: Advances in Non-Invasive Positive Airway Pressure TechnologyLuis Enrique Caceres AlavrezNo ratings yet
- Need For Criminal Cases About Types of Wound Introduction To The Different Types of WoundDocument5 pagesNeed For Criminal Cases About Types of Wound Introduction To The Different Types of WoundAdvocate Harish KashyapNo ratings yet
- Advanced Cardiovascular Life Support in Adults (ACLS) : SubtitleDocument30 pagesAdvanced Cardiovascular Life Support in Adults (ACLS) : SubtitleMohamad El SharNo ratings yet