You might also like
- TCPstack Embedded SystemDocument98 pagesTCPstack Embedded SystemMuneeb AhmadNo ratings yet
- WirelessHART - Implementation and Evaluation On Wireless SensorsDocument51 pagesWirelessHART - Implementation and Evaluation On Wireless Sensorstanathos18No ratings yet
- Guide To FPGA Implementation of Arithmetic FunctionsDocument472 pagesGuide To FPGA Implementation of Arithmetic FunctionsKKiranKumarNo ratings yet
- Electronic Labs 1-15Document38 pagesElectronic Labs 1-15Fexter Pérez100% (2)
- Engineering Applications of FPGAsDocument230 pagesEngineering Applications of FPGAsHeitor Galvão100% (1)
- User'S Guide: Simelectronics 1Document83 pagesUser'S Guide: Simelectronics 1Gabriel Aparecido FonsecaNo ratings yet
- Onkyo Onwer's Manual TX-SR803 703 PDFDocument96 pagesOnkyo Onwer's Manual TX-SR803 703 PDFVidiNo ratings yet
- Digital Design Flow Eda ToolDocument94 pagesDigital Design Flow Eda ToolKrish GokulNo ratings yet
- ParaView Catalyst UsersGuideDocument67 pagesParaView Catalyst UsersGuidebartimuf7097No ratings yet
- Signal Integrity PDFDocument23 pagesSignal Integrity PDFKhadar Basha100% (1)
- Good VLSI Design Test Power TutorialDocument1,515 pagesGood VLSI Design Test Power TutorialprakashthamankarNo ratings yet
- Design of High Speed I/O Interfaces for High Performance MicroprocessorsDocument139 pagesDesign of High Speed I/O Interfaces for High Performance MicroprocessorsMohamed MegahedNo ratings yet
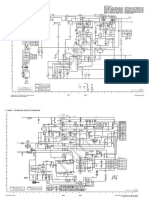
- CM8340 Diagrama Fuente PDFDocument2 pagesCM8340 Diagrama Fuente PDFLorenzo100% (2)
- BigDFT User Manual: Installation and StructureDocument35 pagesBigDFT User Manual: Installation and StructureSunghyun KimNo ratings yet
- Flexible Signal Processing Algorithms For Wireless CommunicationsDocument132 pagesFlexible Signal Processing Algorithms For Wireless CommunicationsAlbe Birio GuascoNo ratings yet
- FPGA DedupDocument49 pagesFPGA Dedupunicycle1234No ratings yet
- Designing An Object Oriented DecompilerDocument31 pagesDesigning An Object Oriented DecompilerVishal KumarNo ratings yet
- PowerGrid A Computation Engine For LargeDocument18 pagesPowerGrid A Computation Engine For LargeVARALAKSHMI SEERAPUNo ratings yet
- Power Management in Embedded ARM HW Integrated With Embedded LinuxDocument77 pagesPower Management in Embedded ARM HW Integrated With Embedded LinuxvankhoakmtNo ratings yet
- x86 - 64 Abi 0.21Document68 pagesx86 - 64 Abi 0.21Nagi ReddyNo ratings yet
- Real-Time Signal Processing Implementation For 100 Gb/s Fibre CommunicationDocument37 pagesReal-Time Signal Processing Implementation For 100 Gb/s Fibre Communicationzygmunt60No ratings yet
- Ece4750 Tut3 Verilog PDFDocument79 pagesEce4750 Tut3 Verilog PDFWaleed SaeedNo ratings yet
- ALIZE EvaluationDocument68 pagesALIZE EvaluationJonathan Arley Torres Castañeda0% (1)
- Beowulf SetupDocument46 pagesBeowulf SetupBiswa DuttaNo ratings yet
- Soc ModellingDocument40 pagesSoc Modellinggangavinodc123No ratings yet
- Dynamic Scheduler For Multi-Core Processor - Final Report - All 4 NamesDocument63 pagesDynamic Scheduler For Multi-Core Processor - Final Report - All 4 NamesAbbas BaramatiwalaNo ratings yet
- Real-Time Computer Vision Processing On A Wearable SystemDocument16 pagesReal-Time Computer Vision Processing On A Wearable SystemSyllogismRXSNo ratings yet
- Latency LTEDocument58 pagesLatency LTEAbdul Majeed Khan100% (1)
- Phased Gs BookDocument60 pagesPhased Gs BookGuang ChenNo ratings yet
- SciNet TutorialDocument22 pagesSciNet Tutorialddsk86No ratings yet
- ManualDocument13 pagesManualEng-Mushtaq HejairaNo ratings yet
- BGP DocumentationDocument57 pagesBGP Documentationwillfrank89No ratings yet
- Capsl tm05Document25 pagesCapsl tm05plopNo ratings yet
- The Execution Model of APZ/PLEX - An Informal Description: Johan Erikson and Bo LindellDocument47 pagesThe Execution Model of APZ/PLEX - An Informal Description: Johan Erikson and Bo Lindellyyyy22221111No ratings yet
- An OpenCL Method of Parallel Sorting Algorithms For GPU ArchitectureDocument8 pagesAn OpenCL Method of Parallel Sorting Algorithms For GPU ArchitectureAI Coordinator - CSC JournalsNo ratings yet
- Core ManualDocument72 pagesCore ManualAnonymous N22tyB6UNNo ratings yet
- Introduction to Computing with MATLAB: An OverviewDocument92 pagesIntroduction to Computing with MATLAB: An OverviewManoj JaiswalNo ratings yet
- Adding Ethernet Connectivity To DSP-Based Systems: M. Nashaat Soliman Novra Technologies IncDocument15 pagesAdding Ethernet Connectivity To DSP-Based Systems: M. Nashaat Soliman Novra Technologies IncthirusriviNo ratings yet
- AL-71703-AA Manual AllprintBasic 1.x Alltec enDocument52 pagesAL-71703-AA Manual AllprintBasic 1.x Alltec enSilas Tadeu Galdino da SilvaNo ratings yet
- Parallela Cluster by Michael Johan KrugerDocument56 pagesParallela Cluster by Michael Johan KrugerGiacomo Marco ToigoNo ratings yet
- SCOA Unit 1Document16 pagesSCOA Unit 1Nando CenaNo ratings yet
- Auto-Vectorization With The Intel Compilers: Is Your Code Ready For Sandy Bridge and Knights Corner?Document12 pagesAuto-Vectorization With The Intel Compilers: Is Your Code Ready For Sandy Bridge and Knights Corner?Stephen PattersonNo ratings yet
- Sprufp 2 ADocument39 pagesSprufp 2 ALLNo ratings yet
- 689278Document262 pages689278abhipankajNo ratings yet
- 2.0 Design FlowDocument21 pages2.0 Design FlowAvas RoyNo ratings yet
- New Idea&AesDocument222 pagesNew Idea&AesfudamtewNo ratings yet
- Master of Science Thesis: Fernando Álvarez Cabrera Supervisor: Professor Robin SharpDocument194 pagesMaster of Science Thesis: Fernando Álvarez Cabrera Supervisor: Professor Robin SharpFernando ÁlvarezNo ratings yet
- Actel SPI APBDocument38 pagesActel SPI APBgangadhar11No ratings yet
- DSP System Toolbox™ Getting Started GuideDocument91 pagesDSP System Toolbox™ Getting Started GuideKhai HuynhNo ratings yet
- Metis ManualDocument34 pagesMetis Manualgalolo8989No ratings yet
- Lab 4 FunctorsDocument6 pagesLab 4 FunctorsPhil JonesNo ratings yet
- Jerasure: A Library in C Facilitating Erasure Coding For Storage ApplicationsDocument37 pagesJerasure: A Library in C Facilitating Erasure Coding For Storage ApplicationsherrwieseNo ratings yet
- Stereo Video Processing For Depth Map: Harlan Hile and Colin ZhengDocument8 pagesStereo Video Processing For Depth Map: Harlan Hile and Colin Zhengajnabee4u18100% (2)
- DrakeDocument45 pagesDrakeAngel Freddy Ganazhapa MallaNo ratings yet
- SIMIC TSP Simulator10.1.1.103Document52 pagesSIMIC TSP Simulator10.1.1.103Tomek SkoczkowskiNo ratings yet
- 3D hp-ADAPTIVE FINITE ELEMENT PACKAGE FORTRAN 90 IMPLEMENTATION (3Dhp90Document41 pages3D hp-ADAPTIVE FINITE ELEMENT PACKAGE FORTRAN 90 IMPLEMENTATION (3Dhp90Marco LopezNo ratings yet
- ASCII ProtocolDocument97 pagesASCII ProtocolelricloboNo ratings yet
- Mantovani Thesis PDFDocument230 pagesMantovani Thesis PDFMatthew LeNo ratings yet
- 1186 Slave Architecture For The Robonova MR C3024 Using The HMI Protocol IRI Technical ReportDocument54 pages1186 Slave Architecture For The Robonova MR C3024 Using The HMI Protocol IRI Technical ReportEsteban Mejía100% (1)
- AN2799 Application Note: Measuring Mains Power Consumption With The STM32x and STPM01Document14 pagesAN2799 Application Note: Measuring Mains Power Consumption With The STM32x and STPM01am1liNo ratings yet
- Dataflow Supercomputing Essentials: Algorithms, Applications and ImplementationsDocument157 pagesDataflow Supercomputing Essentials: Algorithms, Applications and ImplementationsMaurizio VivianiNo ratings yet
- Zesto ManualDocument43 pagesZesto ManualMajid DadashiNo ratings yet
- Olivewood Apartments Rental ApplicationDocument6 pagesOlivewood Apartments Rental ApplicationAbhishek SaxenaNo ratings yet
- Olivewood Apartments Rental ApplicationDocument6 pagesOlivewood Apartments Rental ApplicationAbhishek SaxenaNo ratings yet
- GUIDocument35 pagesGUIAndac KizilirmakNo ratings yet
- Human-computer interface using eye movements and blinksDocument57 pagesHuman-computer interface using eye movements and blinksAbhishek SaxenaNo ratings yet
- Agilent 8902A Measuring Receiver: Product NoteDocument8 pagesAgilent 8902A Measuring Receiver: Product Notejcfermosell100% (1)
- Introduction To Semiconductor DiodesDocument7 pagesIntroduction To Semiconductor DiodesAndy CentenaNo ratings yet
- CortexM1-Processor Tutorial UG PDFDocument67 pagesCortexM1-Processor Tutorial UG PDFHuy HoangNo ratings yet
- M140 - HighVoltage DC Power - SuppliesDocument4 pagesM140 - HighVoltage DC Power - SuppliesAlexander PischulinNo ratings yet
- GPS Vehicle Tracker VT310BB User ManualDocument21 pagesGPS Vehicle Tracker VT310BB User ManualMarcos AragaoNo ratings yet
- Datasheet PDFDocument19 pagesDatasheet PDFJulioCesar MagalhaesNo ratings yet
- Nova TeckDocument3 pagesNova TeckMárcio FerreiraNo ratings yet
- Circular 4 - Open ModeDocument4 pagesCircular 4 - Open ModeAll India Radio ShantiniketanNo ratings yet
- Viion TrafficCam - Cut Sheet-01Document2 pagesViion TrafficCam - Cut Sheet-01Assur AlNo ratings yet
- TM 7043Document13 pagesTM 7043Radek KurekNo ratings yet
- EMR2 Flyer enDocument6 pagesEMR2 Flyer enEloy Cabrera100% (3)
- Gunn 0203096Document2 pagesGunn 0203096Jorge R. BaezNo ratings yet
- PLC Leaflet 2013Document24 pagesPLC Leaflet 2013S M NaveedNo ratings yet
- PowerMaxExpress V17 Eng User Guide D-303974 PDFDocument38 pagesPowerMaxExpress V17 Eng User Guide D-303974 PDFSretenNo ratings yet
- DC Circuit Analysis EssentialsDocument33 pagesDC Circuit Analysis EssentialsFlorin FinaruNo ratings yet
- General Radio Type 1840-A Output Power Meter Instruction Manual (1840-0100-G), 11-1972.Document14 pagesGeneral Radio Type 1840-A Output Power Meter Instruction Manual (1840-0100-G), 11-1972.Bob Laughlin, KWØRLNo ratings yet
- Relatively Simple CPU and 8085 Microprocessor InstructionDocument36 pagesRelatively Simple CPU and 8085 Microprocessor Instructionganesh92100% (2)
- 08 Bist 2ppDocument29 pages08 Bist 2ppAzhagesvaran TamilselvamNo ratings yet
- WAGO Electronic Interface 60391256 PDFDocument892 pagesWAGO Electronic Interface 60391256 PDFSerdar AksoyNo ratings yet
- Canon IR2535 Trouble Error CodesDocument36 pagesCanon IR2535 Trouble Error Codesnafees100% (4)
- Open Source Development BoardsDocument20 pagesOpen Source Development BoardsRemyaNo ratings yet
- GreenUp Waterproof G2 WT158 LuxSpace G4 FeaturesDocument10 pagesGreenUp Waterproof G2 WT158 LuxSpace G4 FeaturesCanhVanNo ratings yet
- Realtek: For V4L ConfidentialDocument53 pagesRealtek: For V4L Confidentialstmacount stmacountNo ratings yet
- Simulation of EMI Filters Using Matlab: M.Satish Kumar, Dr.A.JhansiraniDocument4 pagesSimulation of EMI Filters Using Matlab: M.Satish Kumar, Dr.A.JhansiraniDhanush VishnuNo ratings yet
- PRC 138Document2 pagesPRC 138ahbamaNo ratings yet
- Questions & Answers On Circuit Variables and ElementsDocument23 pagesQuestions & Answers On Circuit Variables and Elementskibrom atsbha100% (1)
- Anyhertz Drive ShenzenDocument5 pagesAnyhertz Drive ShenzenJose EspinozaNo ratings yet