You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
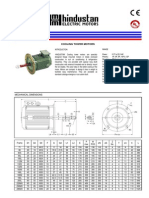
- Cooling Tower MotorDocument2 pagesCooling Tower MotorDipendraTomarNo ratings yet
- EIE412 - Lecture Modules & Contents (2021 - 22)Document18 pagesEIE412 - Lecture Modules & Contents (2021 - 22)sopuruNo ratings yet
- 998-20710038 - Eliwell - NA - 2019a - Catalog - GMA - BrochureDocument60 pages998-20710038 - Eliwell - NA - 2019a - Catalog - GMA - BrochureTesoro HonNo ratings yet
- ENARSI Chapter 19Document72 pagesENARSI Chapter 19kyi lwinNo ratings yet
- HP Laptop 15-Bs0xxDocument124 pagesHP Laptop 15-Bs0xxmanoj14febNo ratings yet
- Keys For @emon9138: TRON Public Key (TRON Address)Document2 pagesKeys For @emon9138: TRON Public Key (TRON Address)Ifty ChowdhuryNo ratings yet
- Huawei ActixOne 20110530 Use Case V3 PDFDocument66 pagesHuawei ActixOne 20110530 Use Case V3 PDFsolarisan6No ratings yet
- Rishabh ResumeDocument4 pagesRishabh ResumeRishabh BhatiaNo ratings yet
- Empowerment Technology/ Prelim: 11-A, B, AND C Nadia G. Refil 09464199149Document44 pagesEmpowerment Technology/ Prelim: 11-A, B, AND C Nadia G. Refil 09464199149John Carlo Cabiles MellizaNo ratings yet
- Supply Chain IntegrationDocument9 pagesSupply Chain IntegrationJohn SujithNo ratings yet
- Manual de Partes Motor Cummins Dongfeng A Gas Set 2010Document90 pagesManual de Partes Motor Cummins Dongfeng A Gas Set 2010Fernando Jorge Gomez SulcaNo ratings yet
- SAP Product CostingDocument2 pagesSAP Product CostingRona RussellNo ratings yet
- Project Quality Management PMPDocument47 pagesProject Quality Management PMPnguyen728100% (2)
- Multi-Crop HarvesterDocument6 pagesMulti-Crop HarvesterErwinNo ratings yet
- Ad 114Document4 pagesAd 114Fadzilah NijiNo ratings yet
- Asian Paints - FinalDocument11 pagesAsian Paints - FinalRahul BhardwajNo ratings yet
- DORNA EPS-B1 Servo User Manual V1.11 OcrDocument191 pagesDORNA EPS-B1 Servo User Manual V1.11 Ocrnapo3tNo ratings yet
- Topics That We Will ExploreDocument135 pagesTopics That We Will ExploreAJNo ratings yet
- Guidance On ECDIS For Ships Calling at Australian Ports: Software Quality Assurance AnomaliesDocument3 pagesGuidance On ECDIS For Ships Calling at Australian Ports: Software Quality Assurance AnomaliesCanumalla RamkumarNo ratings yet
- FSO - 21 - Safety Functions UM - D - A5Document444 pagesFSO - 21 - Safety Functions UM - D - A5Sanu YoNo ratings yet
- Planning Guide PMP450i CambiumDocument237 pagesPlanning Guide PMP450i CambiumPedro MarroquinNo ratings yet
- A Guide For Using PTM and The CIBANO 500 To Test Circuit Breakers in North AmericaDocument36 pagesA Guide For Using PTM and The CIBANO 500 To Test Circuit Breakers in North AmericaargaNo ratings yet
- Generator Breaker Equipped With Vacuum InterruptersDocument4 pagesGenerator Breaker Equipped With Vacuum InterruptersVenna Karthik ReddyNo ratings yet
- Chapter 1Document6 pagesChapter 1Bhuvaneswari TSNo ratings yet
- Gym Management SystemDocument24 pagesGym Management SystemManish Sundarraj100% (4)
- DELTA IA-SI DIAView C EN 20190517 web-SCADADocument20 pagesDELTA IA-SI DIAView C EN 20190517 web-SCADAchandra mouliNo ratings yet
- GarageBand TutorialDocument8 pagesGarageBand TutorialMilan RadisicNo ratings yet
- Tutorial On Earned Value Management Systems: Dennis J. FraileyDocument14 pagesTutorial On Earned Value Management Systems: Dennis J. FraileySheetal IyerNo ratings yet
- 65kVA GSW65P P Pramac 2021Document1 page65kVA GSW65P P Pramac 2021RafatNo ratings yet
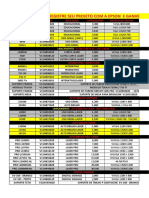
- Registre Seu Projeto Com A Epson E Ganhe Desconto: Modelo Aplicaçao Luminsidade Resoluçao NativaDocument20 pagesRegistre Seu Projeto Com A Epson E Ganhe Desconto: Modelo Aplicaçao Luminsidade Resoluçao NativaJairo RodriguesNo ratings yet