You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Codding Tugas Akhir DPK 1Document2 pagesCodding Tugas Akhir DPK 1Nicco ComputerNo ratings yet
- Sample DBDocument21 pagesSample DBDinesh YepuruNo ratings yet
- EIS SM Booster Antim Prahar Charts 2022 23Document94 pagesEIS SM Booster Antim Prahar Charts 2022 23Vinamra GuptaNo ratings yet
- Chapter 6: GB InterfaceDocument43 pagesChapter 6: GB Interfacesonchoy17No ratings yet
- Current Transformers How To Specify Them PDFDocument36 pagesCurrent Transformers How To Specify Them PDFargari19No ratings yet
- Functional Analysis: Ashok JoshiDocument32 pagesFunctional Analysis: Ashok JoshiMadhvendra MishraNo ratings yet
- Ai ExplanationsDocument3 pagesAi Explanationskathlyne BarcenaNo ratings yet
- EPC Control Wiring Applications 836269cDocument110 pagesEPC Control Wiring Applications 836269cdylan_dearing@hotmail.comNo ratings yet
- Cinimamachine TuteDocument7 pagesCinimamachine TutegregoryNo ratings yet
- Control Engineering - IntroductionDocument26 pagesControl Engineering - IntroductionNithin GowdaNo ratings yet
- PDF Dis StandardsDocument35 pagesPDF Dis StandardsEdén PastoraNo ratings yet
- Hướng Dẫn Web Design and DevelopmentDocument4 pagesHướng Dẫn Web Design and DevelopmentCONFESSIONS ADMINNo ratings yet
- CSV Python AnnotatedDocument27 pagesCSV Python AnnotatedSuman DasNo ratings yet
- Service Manual: iPF700 SeriesDocument198 pagesService Manual: iPF700 SeriesAlin DoafidriNo ratings yet
- January DebateUS BriefDocument1,209 pagesJanuary DebateUS BriefEthan JacobsNo ratings yet
- 12 Best Practices For Core Banking MigrationDocument9 pages12 Best Practices For Core Banking MigrationitouzenNo ratings yet
- Knee X-Ray Image Analysis Method For Automated Detection of OsteoarthritisDocument9 pagesKnee X-Ray Image Analysis Method For Automated Detection of OsteoarthritisAjaWayNo ratings yet
- Serial Number Word 2010Document1 pageSerial Number Word 2010Akhmad Yusuf SulaimanNo ratings yet
- Kingfisher CRMDocument6 pagesKingfisher CRMAjit KanojiaNo ratings yet
- TRAXPro ManualDocument86 pagesTRAXPro ManualErlinangNo ratings yet
- Data Analyis - PPT - 2Document18 pagesData Analyis - PPT - 2pppooNo ratings yet
- Mto, Bom & BoqDocument3 pagesMto, Bom & BoqDayo IdowuNo ratings yet
- Chapter 1 Introduction To ComputersDocument10 pagesChapter 1 Introduction To ComputersKate GuerreroNo ratings yet
- Ezra Pound PDFDocument2 pagesEzra Pound PDFGaryNo ratings yet
- Java Exam Preparation Practice Test - 1Document10 pagesJava Exam Preparation Practice Test - 1mziabdNo ratings yet
- Sage One Accounting Getting Started Guide 1Document82 pagesSage One Accounting Getting Started Guide 1romeoNo ratings yet
- Chief Patrons: in Association With Global Research Conference Forum Organizes Virtual International Conference OnDocument2 pagesChief Patrons: in Association With Global Research Conference Forum Organizes Virtual International Conference OnRavishankar BhaganagareNo ratings yet
- When Data Visualization Works - and When It Doesn'tDocument8 pagesWhen Data Visualization Works - and When It Doesn'tronald johannNo ratings yet
- ENSA v7 Module & Final Exam Design DocumentsDocument4 pagesENSA v7 Module & Final Exam Design DocumentsCCNA 200-301No ratings yet
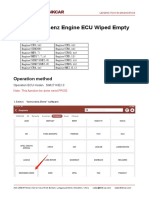
- Mercedes Benz Engine ECU Wiped EmptyDocument9 pagesMercedes Benz Engine ECU Wiped EmptyP BNo ratings yet