You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Ek Ong Kar, Sat Nam, Siri Wha (He) Guruis The Adi Shakti Mantra, and It Is VeryDocument1 pageEk Ong Kar, Sat Nam, Siri Wha (He) Guruis The Adi Shakti Mantra, and It Is VerydositheeNo ratings yet
- The Inner Enterprise: Guanzi, Neiye 管子。內業)Document13 pagesThe Inner Enterprise: Guanzi, Neiye 管子。內業)dositheeNo ratings yet
- Higher Order Thinking SkillsDocument177 pagesHigher Order Thinking SkillsRazak Kadir100% (6)
- Writing Philosophy EssaysDocument7 pagesWriting Philosophy EssaysdositheeNo ratings yet
- Wu Style of Tai Chi ChuanDocument125 pagesWu Style of Tai Chi ChuanpnubianpNo ratings yet
- (Article) The Development of Peirce's Philosophy by Murray G. MurpheyDocument7 pages(Article) The Development of Peirce's Philosophy by Murray G. MurpheydositheeNo ratings yet
- Ancient WeaponsDocument14 pagesAncient WeaponsManoj ReddyNo ratings yet
- Simple Techniques For The Maintenance and Repair of BooksDocument34 pagesSimple Techniques For The Maintenance and Repair of Booksdosithee100% (2)
- Load Intelex Past MastersDocument3 pagesLoad Intelex Past MastersdositheeNo ratings yet
- Transformative Philosophy A Study of Sankara Fichte and HeideggerDocument199 pagesTransformative Philosophy A Study of Sankara Fichte and HeideggerdositheeNo ratings yet
- Philosophical Works of Descartes Vol. 1Document474 pagesPhilosophical Works of Descartes Vol. 1dosithee100% (1)
- 15 Distorted ThoughtsDocument1 page15 Distorted ThoughtsdositheeNo ratings yet
- Math 124 Misc H'WorkDocument1 pageMath 124 Misc H'WorkdositheeNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Octopussy - Ian Fleming - 1966Document53 pagesOctopussy - Ian Fleming - 1966HrisikeshBoraNo ratings yet
- Patagonia Equipment List, 2013Document6 pagesPatagonia Equipment List, 2013arianebelenNo ratings yet
- Kettlebell 5 PillarsDocument4 pagesKettlebell 5 Pillarsmarin0410100% (1)
- SR Working 07 EN PDFDocument34 pagesSR Working 07 EN PDFrfzebralNo ratings yet
- ArticleDocument2 pagesArticleapi-6779672550% (1)
- Mt. Magsanga Isabel, LeyteDocument4 pagesMt. Magsanga Isabel, LeyteGlenda TapangNo ratings yet
- Table Equipment NumberDocument2 pagesTable Equipment NumberZaidy IrawannNo ratings yet
- The NoseDocument17 pagesThe NosevladimirNo ratings yet
- Webbing Sling - SWLDocument4 pagesWebbing Sling - SWLChandrasekhar SonarNo ratings yet
- Chris Tarney: EducationDocument1 pageChris Tarney: Educationapi-383928151No ratings yet
- Rope Man ShipDocument5 pagesRope Man ShipJorelyn FriasNo ratings yet
- Mountaineering Activities-Hiking/Trekking: LessonDocument4 pagesMountaineering Activities-Hiking/Trekking: LessonLyka Lorraine OlegarioNo ratings yet
- Rope Splicing GuideDocument28 pagesRope Splicing GuideAli Irvali100% (3)
- RiggingDocument129 pagesRiggingInnocent BhaikwaNo ratings yet
- Handstand Development 4 Week ProgramDocument1 pageHandstand Development 4 Week ProgramMateo MendozaNo ratings yet
- Analysis of A Fatal Bungee-Jumping Accident 2004Document16 pagesAnalysis of A Fatal Bungee-Jumping Accident 2004Rodolfo AriasNo ratings yet
- Escalera Arabe (Malaga)Document16 pagesEscalera Arabe (Malaga)encadenaravistaNo ratings yet
- Everyday English 2: Present Perfect: Yes / No Questions and Short Answers, Wh-QuestionsDocument1 pageEveryday English 2: Present Perfect: Yes / No Questions and Short Answers, Wh-QuestionsSergio TejedorNo ratings yet
- The Seven Minimalist Rescue Archetypes Drawing #2Document1 pageThe Seven Minimalist Rescue Archetypes Drawing #2Forum PompieriiNo ratings yet
- Barbarian - Level 5Document3 pagesBarbarian - Level 5Dungeon MasterNo ratings yet
- Voices 3 TB Unit 4-6Document78 pagesVoices 3 TB Unit 4-6beacikuNo ratings yet
- Elings Park BrochureDocument15 pagesElings Park BrochureBrett RightmerNo ratings yet
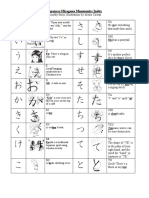
- Waterford Hiragana Mnemonics ChartDocument2 pagesWaterford Hiragana Mnemonics ChartBlae Phantom80% (5)
- Your Bucket ListDocument12 pagesYour Bucket ListMapStudio100% (1)
- Present Simple or Present Continuous 16137Document2 pagesPresent Simple or Present Continuous 16137Sotoc Monica-GabrielaNo ratings yet
- Refers To Leisure Pursuits Engaged in The Outdoors, Often in Natural or Semi-Natural Settings Out of TownDocument21 pagesRefers To Leisure Pursuits Engaged in The Outdoors, Often in Natural or Semi-Natural Settings Out of TownSam CajesNo ratings yet
- Northstar 4E Reading & Writing Level 3: 1 Answer KeyDocument14 pagesNorthstar 4E Reading & Writing Level 3: 1 Answer KeyAyça Akbaş Dağdeviren67% (67)
- Guia de Escalada Costa BlancaDocument9 pagesGuia de Escalada Costa BlancaMiguelNo ratings yet
- Alaska ExcursionsDocument108 pagesAlaska ExcursionsLinda Wright SimmenNo ratings yet