You might also like
- Lista de Exercícios 1 FCT PDFDocument13 pagesLista de Exercícios 1 FCT PDFGabrielNo ratings yet
- Lista de Exercícios VI - 2020-2Document4 pagesLista de Exercícios VI - 2020-2Mikael CassaoNo ratings yet
- Sistemas de Excitação e Reguladores de TensãoDocument26 pagesSistemas de Excitação e Reguladores de TensãojuniobrNo ratings yet
- Questoes Prova SistemasDocument10 pagesQuestoes Prova SistemasShawn RamseyNo ratings yet
- Compensador Estático de Reativos Controlado A Tiristores Modelagem e SimulaçãoDocument6 pagesCompensador Estático de Reativos Controlado A Tiristores Modelagem e Simulaçãojulio_souveiaNo ratings yet
- Modelagem e Análise de Sistemas DinâmicosDocument113 pagesModelagem e Análise de Sistemas DinâmicosJoel AlvesNo ratings yet
- Aula - Nise - Cap1 CONTROLE LINEARDocument39 pagesAula - Nise - Cap1 CONTROLE LINEARLucas RodriguesNo ratings yet
- Exame Suficiência KaduHenrique MatheusKlug RelatorioDocument11 pagesExame Suficiência KaduHenrique MatheusKlug Relatoriomatheus.costaNo ratings yet
- Simulado Saep 2016Document21 pagesSimulado Saep 2016danielfortal100% (1)
- Corripio - Capitulo 6Document30 pagesCorripio - Capitulo 6tai_ssNo ratings yet
- Lista 4 - 2018Document4 pagesLista 4 - 2018Caio Hans Rodrigues Da MattaNo ratings yet
- Aula 02 - 30-09-2021Document22 pagesAula 02 - 30-09-2021Felipe AraújoNo ratings yet
- Acionamento de Motores ElétricosDocument92 pagesAcionamento de Motores ElétricosGeorgia Vander100% (1)
- Mecanismos PDFDocument15 pagesMecanismos PDFtscopelNo ratings yet
- Artigo Modelagem Caixa CinzaDocument7 pagesArtigo Modelagem Caixa CinzaanaaraujoNo ratings yet
- Esteira TransportadoraDocument7 pagesEsteira TransportadoraËnesson Vicente100% (1)
- Aula 01-Automação e ControleDocument27 pagesAula 01-Automação e ControlejaumNo ratings yet
- Controle Automático Aula Prática IDocument2 pagesControle Automático Aula Prática IRodrigues Antonio NaboNo ratings yet
- Exercicios GrafcetDocument6 pagesExercicios GrafcetIsaalexteixfernandes7472No ratings yet
- 112 - XXIII SNPTEE - Sistema Excitação Na Dinâmica Do Curto Circuito de Geradores (21!05!2015)Document8 pages112 - XXIII SNPTEE - Sistema Excitação Na Dinâmica Do Curto Circuito de Geradores (21!05!2015)Jacques DeroualleNo ratings yet
- Sistemas de ControleDocument7 pagesSistemas de ControleFilipe A. VieiraNo ratings yet
- 1 A ListaDocument4 pages1 A ListaCarol BandoliNo ratings yet
- ControleVelocidadeMotorCC 2007Document47 pagesControleVelocidadeMotorCC 2007AlyssonAlmeidaNo ratings yet
- Lista 1 - Teoria de ControleDocument5 pagesLista 1 - Teoria de ControleVitor AraujoNo ratings yet
- 2a Entrega - Projeto de Um Portão ElétricoDocument10 pages2a Entrega - Projeto de Um Portão ElétricoWILLIAN PATRICK DA SILVA RODRIGUESNo ratings yet
- Aula Pratica IDocument3 pagesAula Pratica IMonizNo ratings yet
- Pratica 8EA2 OsciladorcontroladoportensaoDocument7 pagesPratica 8EA2 OsciladorcontroladoportensaoJoão Victor de França GomesNo ratings yet
- Conversores CC - Curso BásicoDocument10 pagesConversores CC - Curso BásicoMatthew WarrenNo ratings yet
- Ficha de Exercícios: I. Introdução Dos Sistemas de ControleDocument3 pagesFicha de Exercícios: I. Introdução Dos Sistemas de ControleLeo WilliamNo ratings yet
- ApostilaCap1V2007 PDFDocument13 pagesApostilaCap1V2007 PDFAntonio Adalto AltomaniNo ratings yet
- Lista de Exercícios 3Document3 pagesLista de Exercícios 3Rubens JuniorNo ratings yet
- Trabalho Acionamentos ElétricosDocument11 pagesTrabalho Acionamentos ElétricosFelipe NicolaNo ratings yet
- Otimização Paramétrica de Controladores para Um Sistema de Levitação MagnéticaDocument8 pagesOtimização Paramétrica de Controladores para Um Sistema de Levitação MagnéticaWilker Iuri SouzaNo ratings yet
- Apostilha 1Document28 pagesApostilha 1Felipe NunesNo ratings yet
- Lista de Exercícios - SHPDocument6 pagesLista de Exercícios - SHPFelipe SouzaNo ratings yet
- Os Modelos Matemáticos TípicosDocument33 pagesOs Modelos Matemáticos TípicosSamuel Silva50% (2)
- Estabilidade de Sistemas de PotênciaDocument92 pagesEstabilidade de Sistemas de PotênciaNilo DantasNo ratings yet
- Exp1 09Document14 pagesExp1 09MatemaTicaNo ratings yet
- Gabarito - Exercicios de Teorico HidráulicaDocument6 pagesGabarito - Exercicios de Teorico HidráulicaGabriel ZancanellaNo ratings yet
- ECA602 - Lista - 1 - Controle ClássicoDocument4 pagesECA602 - Lista - 1 - Controle ClássicoThiago ValimNo ratings yet
- Resumo Cap 1 (Ivo Leoni)Document6 pagesResumo Cap 1 (Ivo Leoni)Ivo LeoniNo ratings yet
- Acionamento de Um Circuito HidráulicoDocument5 pagesAcionamento de Um Circuito HidráulicoBueno MouraNo ratings yet
- Controle de Servomotores CCDocument27 pagesControle de Servomotores CCFernando Henrique G. Zucatelli100% (1)
- Apostila ControleDocument91 pagesApostila ControleDiego HernandezNo ratings yet
- Biestaveis SemaforoDocument7 pagesBiestaveis SemaforoMaksuel VellosoNo ratings yet
- Calibrador Automatico EncoderDocument5 pagesCalibrador Automatico EncoderaminotepNo ratings yet
- Diagrama de BlocosDocument6 pagesDiagrama de BlocosMATHEUS HENRIQUE SILVA CAVALCANTENo ratings yet
- Lista AutomaçãoDocument61 pagesLista AutomaçãoHiago bragaNo ratings yet
- AULA PROTEÇÃO CAPITULO 7.1 Rev01Document65 pagesAULA PROTEÇÃO CAPITULO 7.1 Rev01mauricio_rodrigues09No ratings yet
- Primeiro Experimento - Modelagem Matemática de Sistemas Físicos - Motor DC - V2021-02Document5 pagesPrimeiro Experimento - Modelagem Matemática de Sistemas Físicos - Motor DC - V2021-02Rodrigo LimaNo ratings yet
- ApostilaSEP IDocument125 pagesApostilaSEP INathalia OliveiraNo ratings yet
- Mecatrônica: Teoria de ControleDocument46 pagesMecatrônica: Teoria de ControleBelo traderNo ratings yet
- p1 Controle AulasDocument135 pagesp1 Controle AulasjoaoreniNo ratings yet
- Controle e Servomecanismos - UNICAMPDocument262 pagesControle e Servomecanismos - UNICAMPLuiz Carlos Soares SoaresNo ratings yet
- Laborato - Rio 1 - P2Document3 pagesLaborato - Rio 1 - P2Michael ZardoNo ratings yet
- Configuração SCIG Alternativa, SG, Controle Potência e TorqueDocument6 pagesConfiguração SCIG Alternativa, SG, Controle Potência e TorqueAthila LimaNo ratings yet
- Classificação Das Máquinas de FluidoDocument13 pagesClassificação Das Máquinas de FluidoDalmedson Freitas FilhoNo ratings yet
- Curriculo GupyDocument2 pagesCurriculo GupyFelipeNo ratings yet
- Boletim - BT RPC 104 SDocument10 pagesBoletim - BT RPC 104 SRicardo PereiraNo ratings yet
- InformáticaDocument313 pagesInformáticaMarcelo Mendes SantucciNo ratings yet
- Futuro Dos Negócios e A Gestão ÁgilDocument130 pagesFuturo Dos Negócios e A Gestão ÁgilPós-Graduações UNIASSELVINo ratings yet
- Roteiro SisdeaDocument12 pagesRoteiro SisdeaRenato ArléoNo ratings yet
- Manual SpaceTourer 2018Document324 pagesManual SpaceTourer 2018ruigeograNo ratings yet
- Relatório de Placa MãeDocument4 pagesRelatório de Placa MãeJunior Oliveira100% (1)
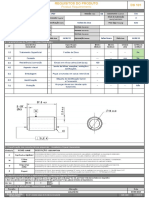
- DS 101 - 23 - 1259 - Fosfato de Zinco - Rev.00Document1 pageDS 101 - 23 - 1259 - Fosfato de Zinco - Rev.00joséNo ratings yet
- Convocação para Avaliação de ConhecimentosDocument5 pagesConvocação para Avaliação de ConhecimentosKlauber GuilhermeNo ratings yet
- Manual Pivotantes PP PT Fs Port-20180831165635Document6 pagesManual Pivotantes PP PT Fs Port-20180831165635Aislan PereiraNo ratings yet
- MAN - TI Instalação-Atualização Do Sankhyaw Ambiente Windows - SqlserverDocument12 pagesMAN - TI Instalação-Atualização Do Sankhyaw Ambiente Windows - SqlserverslucasdfNo ratings yet
- Boleto EltonOliveiraDeSouza 2023 11 20 5012195400000023000Document1 pageBoleto EltonOliveiraDeSouza 2023 11 20 5012195400000023000eswork007No ratings yet
- UntitledDocument314 pagesUntitledChristiane MenezesNo ratings yet
- Circular de Oferta de Franquia - 2021 AADocument27 pagesCircular de Oferta de Franquia - 2021 AAVitória Dourado100% (1)
- Iniciação em Sensoriamento Remoto Teresa Gallotti Florenzano PDFDocument2 pagesIniciação em Sensoriamento Remoto Teresa Gallotti Florenzano PDFFillipe Mendes de AraújoNo ratings yet
- 137 ManualDocument18 pages137 ManualDiego GoncalvesNo ratings yet
- (GRÁTIS) TENHA INFINITOS WHATSAPP's USANDO ESSE HACK - Conteúdo Free - Black RatDocument1 page(GRÁTIS) TENHA INFINITOS WHATSAPP's USANDO ESSE HACK - Conteúdo Free - Black RatIgor OliveiraNo ratings yet
- Guia Prático Revit para Extração Quantidades - Rani de MoraesDocument20 pagesGuia Prático Revit para Extração Quantidades - Rani de MoraesEsio CordeiroNo ratings yet
- Credcesta Pref de GynDocument5 pagesCredcesta Pref de GynSarah RayaneNo ratings yet
- 4-Edital Correios Medio - SuperiorDocument2 pages4-Edital Correios Medio - Superiorjames tomeNo ratings yet
- Manual de Equipamentos PDFDocument70 pagesManual de Equipamentos PDFrael riz100% (1)
- Manual de Instruções ECS H61H2-M17 (V1.0) (72 Páginas)Document1 pageManual de Instruções ECS H61H2-M17 (V1.0) (72 Páginas)Mauricio VieiraNo ratings yet
- Tema 2 - UML para Modelagem Do DomínioDocument54 pagesTema 2 - UML para Modelagem Do DomínioJorge Filipe †No ratings yet
- Quer Saber o Que É GeomarketingDocument1 pageQuer Saber o Que É GeomarketingFrancisco AdrianoNo ratings yet
- 1 Planeamento e Controlo Orçamental 13 08 19 PDFDocument31 pages1 Planeamento e Controlo Orçamental 13 08 19 PDForlando jose fazendaNo ratings yet
- TCC I - Paulo SouzaDocument18 pagesTCC I - Paulo SouzadesestruturadoNo ratings yet
- Aviso N 15 Anexo 1 Notas Preliminares Das Provas Objetivas Acesso Universal Edital 13 2021 ProcergsDocument18 pagesAviso N 15 Anexo 1 Notas Preliminares Das Provas Objetivas Acesso Universal Edital 13 2021 ProcergscaixaandersonNo ratings yet
- 01-Formulário Solicitação de Viabilidade TécnicaDocument1 page01-Formulário Solicitação de Viabilidade TécnicaJonathas Felippe Morais ModestoNo ratings yet
- Microsoft AcessDocument10 pagesMicrosoft Acessrogerio Jose SobraNo ratings yet
- Loterias Online CaixaDocument4 pagesLoterias Online CaixaLucas QueirozNo ratings yet