You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Capacitor GuideDocument1 pageCapacitor Guidekuri79100% (1)
- ST3 6kVA 10kVA UPS Service ManualDocument15 pagesST3 6kVA 10kVA UPS Service ManualSaid Touhami100% (1)
- Delay Calculations: Introduction To Cmos Vlsi DesignDocument27 pagesDelay Calculations: Introduction To Cmos Vlsi DesignbiboNo ratings yet
- Diode - Wikipedia, The Free EncyclopediaDocument15 pagesDiode - Wikipedia, The Free EncyclopediamountfestusNo ratings yet
- Aoc E2450swd LCD MonitorDocument65 pagesAoc E2450swd LCD MonitorCabral RANo ratings yet
- General Physics2 Lesson 2 PDFDocument4 pagesGeneral Physics2 Lesson 2 PDFJohn Renzo MolinarNo ratings yet
- Digital To Analog Converters (DAC) : T. Venkatappa RaoDocument42 pagesDigital To Analog Converters (DAC) : T. Venkatappa RaoMohit MittalNo ratings yet
- Esp32-Wrover Datasheet enDocument28 pagesEsp32-Wrover Datasheet enVitor MatheusNo ratings yet
- What Are The Components of A Wi-Fi Module and Its PCB PrincipleDocument13 pagesWhat Are The Components of A Wi-Fi Module and Its PCB PrinciplejackNo ratings yet
- DSP Objective Type QuestionsDocument15 pagesDSP Objective Type QuestionsAdnan Zahid67% (3)
- SC56-21SRWA: 14.22 MM (0.56 Inch) Single Digit Numeric DisplayDocument4 pagesSC56-21SRWA: 14.22 MM (0.56 Inch) Single Digit Numeric DisplayNguyen Phuoc HoNo ratings yet
- Layout Techniques For Symmetry and MatchingDocument0 pagesLayout Techniques For Symmetry and MatchingarammartNo ratings yet
- Project Report PDFDocument15 pagesProject Report PDFabubakar09ectNo ratings yet
- Max8770gtl 1178390Document48 pagesMax8770gtl 1178390ruben riveraNo ratings yet
- Grid Converters For Photovoltaic and Wind Power SystemsDocument31 pagesGrid Converters For Photovoltaic and Wind Power SystemsJOE BLUENo ratings yet
- Power Up Sequence: Sdram Device OperationDocument15 pagesPower Up Sequence: Sdram Device OperationvetchboyNo ratings yet
- Led and LCD: Unit 5 DR - Raji PanduranganDocument17 pagesLed and LCD: Unit 5 DR - Raji PanduranganDr. Raji PanduranganNo ratings yet
- Analog IO Input Module DatasheetDocument4 pagesAnalog IO Input Module Datasheetcomercial mox asesoriaNo ratings yet
- 2GCS212019A0070 - Manual Power Quality Filter PQFMDocument184 pages2GCS212019A0070 - Manual Power Quality Filter PQFMAdriano ReisNo ratings yet
- MIL STD 1605A - EMI Survey PDFDocument16 pagesMIL STD 1605A - EMI Survey PDFKaren DybergNo ratings yet
- IC693CBL316 Serial Cable, 9-Pin D-Shell To RJ-11 Connector: DescriptionDocument1 pageIC693CBL316 Serial Cable, 9-Pin D-Shell To RJ-11 Connector: DescriptionPham LongNo ratings yet
- PSCAD Cookbook: Capacitor Bank StudiesDocument50 pagesPSCAD Cookbook: Capacitor Bank StudiesShamere Tiongco BuenoNo ratings yet
- Digital ElectronicsDocument18 pagesDigital ElectronicsHarry BeggyNo ratings yet
- Presentation On A Loudspeaker: Prepared byDocument20 pagesPresentation On A Loudspeaker: Prepared byrishipatel17No ratings yet
- Catalogue Sansui 1978Document8 pagesCatalogue Sansui 1978P HandokoNo ratings yet
- Ijest10 02 12 191Document4 pagesIjest10 02 12 191wwahib2No ratings yet
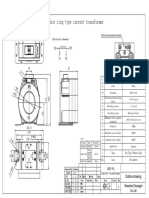
- Outdoor Ring Type Current Transformer: Electrical SchematicDocument1 pageOutdoor Ring Type Current Transformer: Electrical SchematicWalter EguizabalNo ratings yet
- Bidirectional Antenna - Multi-Band 824 - 960 MHZ, 1710 - 2170 MHZ 738 445, 738 446Document1 pageBidirectional Antenna - Multi-Band 824 - 960 MHZ, 1710 - 2170 MHZ 738 445, 738 446Virgil PeiulescuNo ratings yet
- ATV12 NRV Inverter Diagnostics and TroubleshootingDocument6 pagesATV12 NRV Inverter Diagnostics and TroubleshootingCiprian CristiNo ratings yet
- PDH and SDH 2Document47 pagesPDH and SDH 2Damian BlinkNo ratings yet