You might also like
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Hypothesis Testing or How To Decide To Decide Edpsy 580: Carolyn J. AndersonDocument54 pagesHypothesis Testing or How To Decide To Decide Edpsy 580: Carolyn J. AndersonlephuducNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- PolynomialsDocument24 pagesPolynomialslephuducNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- LED Indictor and 7LedSegmentDocument84 pagesLED Indictor and 7LedSegmentlephuducNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Line Search AlgorithmsDocument13 pagesLine Search AlgorithmslephuducNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- TMS320F28335Document196 pagesTMS320F28335lephuducNo ratings yet
- Ge423 Lab4Document13 pagesGe423 Lab4lephuducNo ratings yet
- Understanding Digital Signal Processing, 2nd Edit - Richard G. LyonsDocument684 pagesUnderstanding Digital Signal Processing, 2nd Edit - Richard G. LyonslephuducNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- LP Introduction SolvedDocument9 pagesLP Introduction SolvedRakesh ChandraNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- All DrawingDocument505 pagesAll DrawingMuyizere FabriceNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- S1200CPU LAxesGrpCtrl DOC v11 enDocument62 pagesS1200CPU LAxesGrpCtrl DOC v11 enDavid JimenezNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Comtech ELEVATE 232 REV1.6 10 26 2022Document2 pagesComtech ELEVATE 232 REV1.6 10 26 2022qazxc vbnm100% (1)
- Test Point Insertion For Test Coverage Improvement in DFT - Design For Testability (DFT) .HTMLDocument75 pagesTest Point Insertion For Test Coverage Improvement in DFT - Design For Testability (DFT) .HTMLIlaiyaveni IyanduraiNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Soldering TutorialDocument15 pagesSoldering Tutorialyrikki100% (1)
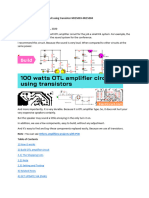
- 100 Watts OTL Amplifier Circuit Using Transistor MJ15003Document7 pages100 Watts OTL Amplifier Circuit Using Transistor MJ15003metinprivat01No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- How To Edit Digital Service Register DSR EntriesDocument7 pagesHow To Edit Digital Service Register DSR EntriesmunisamyprabakaranNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- 5 - Signal Flow Graphs Masons RuleDocument19 pages5 - Signal Flow Graphs Masons RuleMGR fanNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- BPL Mom FileDocument2 pagesBPL Mom FileArun KumarNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Cyber PornographyDocument15 pagesCyber PornographyNivesh DixitNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Dynamic Controlled Atmosphere Storage A New Technology For The New York Storage IndustryDocument4 pagesDynamic Controlled Atmosphere Storage A New Technology For The New York Storage IndustryYogesh KathrechaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- BSTDC Laser ShowDocument1 pageBSTDC Laser ShowRamnish MishraNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Va - Zvuk Osamdesetih - 1997 - Zabavna I Pop - 1982 - 1983Document6 pagesVa - Zvuk Osamdesetih - 1997 - Zabavna I Pop - 1982 - 1983bozicna_jelkaNo ratings yet
- Kendriya Vidyalaya 3 Gandhinagar Cantt Computer ScienceDocument26 pagesKendriya Vidyalaya 3 Gandhinagar Cantt Computer ScienceArk SynopsisNo ratings yet
- MEC101 C3 - Eng. Soln.Document24 pagesMEC101 C3 - Eng. Soln.kamalNo ratings yet
- Spesifikasi Cardio 7Document2 pagesSpesifikasi Cardio 7Ali RidwanNo ratings yet
- 458 Challenge BrochureDocument19 pages458 Challenge BrochureKent WaiNo ratings yet
- Ut 2217Document1 pageUt 2217alisintaxNo ratings yet
- Erp Project Manager PDFDocument2 pagesErp Project Manager PDFHayleyNo ratings yet
- Introduction To Operations Research 9Th Edition Hillier Solutions Manual Full Chapter PDFDocument47 pagesIntroduction To Operations Research 9Th Edition Hillier Solutions Manual Full Chapter PDFchihungqo9td5100% (10)
- Sensor de Temperatura OS551A-MA-1 PDFDocument3 pagesSensor de Temperatura OS551A-MA-1 PDFMiguel Angel Chuquín MorachimoNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Gaia Reference v8p4Document57 pagesGaia Reference v8p4De Jesus, AlexanderNo ratings yet
- Dixell xw270k - Xw271k-En-Gb-3722952Document2 pagesDixell xw270k - Xw271k-En-Gb-3722952filipko123No ratings yet
- Mphasis Data 10.4.19Document5 pagesMphasis Data 10.4.19Vyshnavi ThottempudiNo ratings yet
- Circle Office: Divisional Office:: Southern Lahore Circle Gulberg DivisionDocument1 pageCircle Office: Divisional Office:: Southern Lahore Circle Gulberg DivisionWilliam KentNo ratings yet
- Retrostar (Quick Play)Document42 pagesRetrostar (Quick Play)Stephen SandersNo ratings yet
- Fatima Ishfaq-MMT153016Document87 pagesFatima Ishfaq-MMT153016Muhammad Sohail AbidNo ratings yet
- Military Briefing W3S0005 Student HandoutDocument14 pagesMilitary Briefing W3S0005 Student HandoutorcaNo ratings yet
- Mdbun SeriesDocument24 pagesMdbun SeriesBeeNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)