You might also like
- Motor NemaDocument37 pagesMotor NemanmulyonoNo ratings yet
- The Installation of AC Drives Can Yield Some Predictable Benefits and Some Not-So-Predictable Side EffectsDocument3 pagesThe Installation of AC Drives Can Yield Some Predictable Benefits and Some Not-So-Predictable Side EffectsJonathan SantiagoNo ratings yet
- Power Factor Improvement of Induction Motor by Using CapacitorsDocument5 pagesPower Factor Improvement of Induction Motor by Using CapacitorsARUNPRASADEEENo ratings yet
- Dry Type Power Factor Correction Capacitors: Application ManualDocument18 pagesDry Type Power Factor Correction Capacitors: Application ManualososdeanNo ratings yet
- Reduce Electrical Costs for Extrusion With AC MotorsDocument6 pagesReduce Electrical Costs for Extrusion With AC MotorsHicham HafianiNo ratings yet
- Power Factor and Energy Instruments ExplainedDocument24 pagesPower Factor and Energy Instruments ExplainedSumeet KumarNo ratings yet
- Synchronous MotorsDocument25 pagesSynchronous MotorsJan Edward L. SuarezNo ratings yet
- Seminar ReportDocument11 pagesSeminar ReportSsNo ratings yet
- Energy Conservation in Electrication Distribution Network in An IndustryDocument13 pagesEnergy Conservation in Electrication Distribution Network in An IndustryMani KandanNo ratings yet
- Power Factor Improvement of Induction Motor by Using Capacitors AbstractDocument3 pagesPower Factor Improvement of Induction Motor by Using Capacitors AbstractG DamarakeswarNo ratings yet
- Power Amps Efficiency PFDocument5 pagesPower Amps Efficiency PFAnonymous DJrec2No ratings yet
- Energy Efficiency Factsheet - Reducing Power Factor CostDocument4 pagesEnergy Efficiency Factsheet - Reducing Power Factor CostPopo OpopNo ratings yet
- MotorEffic&PF CM5Document28 pagesMotorEffic&PF CM5Alaa RamadanNo ratings yet
- A Primer On Power Factor CorrectionDocument8 pagesA Primer On Power Factor CorrectionRAMESHRMGNo ratings yet
- Minimizing Penalty in Industrialpower Factor Correction by Engaging Apfc UnitDocument15 pagesMinimizing Penalty in Industrialpower Factor Correction by Engaging Apfc UnitabellNo ratings yet
- Power Factor CorrectionDocument13 pagesPower Factor Correctiondimple_bhanaNo ratings yet
- Apfc Final ReportDocument57 pagesApfc Final ReportIshant SiddhrauNo ratings yet
- Ijett V4i7p138 PDFDocument5 pagesIjett V4i7p138 PDFDESMAN SINAGANo ratings yet
- 2006 18 Spring Wiring Matters Power Factor Correction PFCDocument3 pages2006 18 Spring Wiring Matters Power Factor Correction PFCArsyad Harus SemangattNo ratings yet
- Electro-Mechanical Elements of Lift TechnologyDocument28 pagesElectro-Mechanical Elements of Lift TechnologyFiorella Amer CarrNo ratings yet
- Automatic PFC Using Capacitor Banks (31 wordsDocument23 pagesAutomatic PFC Using Capacitor Banks (31 wordsAwais Rehman KambohNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document7 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- 4 - A Primer On Power Factor CorrectionDocument7 pages4 - A Primer On Power Factor CorrectionQM_2010No ratings yet
- Improve Power Factor and Reduce CostsDocument41 pagesImprove Power Factor and Reduce CostsyeabNo ratings yet
- Key Factor Sizing GeneratorDocument2 pagesKey Factor Sizing Generatorjoechengsh0% (1)
- Pro Power FactorDocument45 pagesPro Power Factorsewagegnehu belachewuNo ratings yet
- Speed ControlDocument4 pagesSpeed ControlNguyễn LiêmNo ratings yet
- Apfc Analog ThesisDocument40 pagesApfc Analog ThesispandyamechNo ratings yet
- Chapter One: 1.1 Concepts of Power Factor CorrectionDocument37 pagesChapter One: 1.1 Concepts of Power Factor CorrectionyeabNo ratings yet
- Power Factor ExplainedDocument8 pagesPower Factor ExplainedТоме БабунскиNo ratings yet
- Reverse PowerDocument6 pagesReverse PowerEdward DineshNo ratings yet
- Power FactorDocument42 pagesPower FactormkpqNo ratings yet
- Variable Frequency Drives in A Power Plant: SynopsisDocument22 pagesVariable Frequency Drives in A Power Plant: SynopsisReuben VargheseNo ratings yet
- Synopsis of Power FactorDocument10 pagesSynopsis of Power FactorRavi TiwariNo ratings yet
- chapter 3 - CopyDocument5 pageschapter 3 - CopyIshwar KNo ratings yet
- Voltage Control and Reactive Power Support ServiceDocument6 pagesVoltage Control and Reactive Power Support ServiceBarathNo ratings yet
- Protect Sealed and Sealless Pumps With Power MonitoringDocument4 pagesProtect Sealed and Sealless Pumps With Power Monitoringhmatora72_905124701No ratings yet
- Chapter 1Document15 pagesChapter 1webhareggebru06No ratings yet
- Electric Motors: Syllabus Electric Motors: Types, Losses in Induction Motors, Motor Efficiency, Factors AffectingDocument12 pagesElectric Motors: Syllabus Electric Motors: Types, Losses in Induction Motors, Motor Efficiency, Factors AffectingAjay kunwar singhNo ratings yet
- Quote CT PT Isolator VCB AB Switch Drop Out Fuse Set TPMO SMC LT Distribution Box HT PanelDocument11 pagesQuote CT PT Isolator VCB AB Switch Drop Out Fuse Set TPMO SMC LT Distribution Box HT PanelSharafatNo ratings yet
- Determining Electric Motor Load and EfficiencyDocument16 pagesDetermining Electric Motor Load and Efficiencyschauhan12No ratings yet
- Upf MythDocument3 pagesUpf MythgurbachansainiNo ratings yet
- 6 CBDocument11 pages6 CBemanamy89No ratings yet
- Power Factor Correction Using MATLAB Simulation FinalDocument11 pagesPower Factor Correction Using MATLAB Simulation FinalMansi MansiNo ratings yet
- Automatic Power Factor Correction - Electrical Notes & ArticlesDocument17 pagesAutomatic Power Factor Correction - Electrical Notes & ArticlesSNo ratings yet
- AbstractDocument20 pagesAbstractVijayaa AlmelkarNo ratings yet
- Power FactorDocument3 pagesPower Factorunited_n72No ratings yet
- Lawrence Berkeley National Laboratory: Recent WorkDocument7 pagesLawrence Berkeley National Laboratory: Recent WorkIssac SitNo ratings yet
- Energy Efficient Electrical TechnologiesDocument15 pagesEnergy Efficient Electrical TechnologiesRahul KolheNo ratings yet
- Electic MotorsDocument22 pagesElectic MotorsAshutosh ShuklaNo ratings yet
- Calculation of KvarDocument9 pagesCalculation of KvartwadintwadNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document5 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- 45 16255 EE543 2015 1 1 1 Week 8 9Document25 pages45 16255 EE543 2015 1 1 1 Week 8 9Kristel Mae Hertz CastilloNo ratings yet
- Ansi MV Techtopics20 enDocument4 pagesAnsi MV Techtopics20 enmohamad5357No ratings yet
- CapDocument8 pagesCapkavinsmartNo ratings yet
- Electrical Energy Conservation MotorsDocument4 pagesElectrical Energy Conservation MotorskarthikumarNo ratings yet
- Improve Power Factor by Capacitive VAR CompensationDocument15 pagesImprove Power Factor by Capacitive VAR CompensationMalith DeemanthaNo ratings yet
- Power Factor Correction and Harmonic Control For DC Drive LoadsDocument10 pagesPower Factor Correction and Harmonic Control For DC Drive LoadsJubair Abu SalehNo ratings yet
- World of TeaDocument2 pagesWorld of Teajdcom_inNo ratings yet
- Middle School Math With Pizzazz Book D PDFDocument1 pageMiddle School Math With Pizzazz Book D PDFjdcom_inNo ratings yet
- Batteries Chargers For Stationary ApplicationsDocument54 pagesBatteries Chargers For Stationary ApplicationsBabar SaleemNo ratings yet
- Tutorial On Symmetrical Components: Part 2: Answer KeyDocument23 pagesTutorial On Symmetrical Components: Part 2: Answer Keyjdcom_inNo ratings yet
- Middle School Math With Pizzazz Book D PDFDocument1 pageMiddle School Math With Pizzazz Book D PDFjdcom_inNo ratings yet
- Algb GR PizzaDocument1 pageAlgb GR Pizzajdcom_inNo ratings yet
- Canada Papaya Suppliers, Wholesale Prices, and Market Information - TridgeDocument1 pageCanada Papaya Suppliers, Wholesale Prices, and Market Information - Tridgejdcom_inNo ratings yet
- The Harsh Winters of CanadaDocument1 pageThe Harsh Winters of Canadajdcom_inNo ratings yet
- DPS Harni proposed book list 2016-17Document6 pagesDPS Harni proposed book list 2016-17jdcom_inNo ratings yet
- GR Algb PizzaDocument1 pageGR Algb Pizzajdcom_inNo ratings yet
- Algb Gr7-9 PizzaDocument1 pageAlgb Gr7-9 Pizzajdcom_inNo ratings yet
- Middle School Math With Pizzazz Book D PDFDocument1 pageMiddle School Math With Pizzazz Book D PDFjdcom_inNo ratings yet
- Prealgebra With Pizzazz BookDocument1 pagePrealgebra With Pizzazz Bookjdcom_inNo ratings yet
- Algb gr7-9 PizzaDocument1 pageAlgb gr7-9 Pizzajdcom_inNo ratings yet
- gr7 Algb PizDocument1 pagegr7 Algb Pizjdcom_inNo ratings yet
- Middle School Math With Pizzazz BookDocument1 pageMiddle School Math With Pizzazz Bookjdcom_inNo ratings yet
- Generator & Exciter BasicDocument8 pagesGenerator & Exciter Basictowfiqeee100% (1)
- Comparicion Ansi-Iec LV CCMDocument6 pagesComparicion Ansi-Iec LV CCMRicardo MzaNo ratings yet
- Generator & Exciter BasicDocument8 pagesGenerator & Exciter Basictowfiqeee100% (1)
- I Star Phase hx25 Amp I Delta Phase H X 2.45 AmpDocument2 pagesI Star Phase hx25 Amp I Delta Phase H X 2.45 Ampjdcom_inNo ratings yet
- Middle School Math With Pizzazz Book D PDFDocument1 pageMiddle School Math With Pizzazz Book D PDFjdcom_inNo ratings yet
- Evaluating The Arcflash WhitepaperDocument13 pagesEvaluating The Arcflash Whitepaperjdcom_inNo ratings yet
- Battery ChargingDocument4 pagesBattery Chargingjdcom_inNo ratings yet
- 3 PhaseDocument18 pages3 Phasemessallam100% (3)
- Generator X To R Ratio1Document4 pagesGenerator X To R Ratio1troxburgh2525No ratings yet
- Brochure-Amd Final Low Res 102010Document16 pagesBrochure-Amd Final Low Res 102010jdcom_inNo ratings yet
- 3 CH 2Document20 pages3 CH 2Mary HarrisonNo ratings yet
- Ventilation CalculationDocument1 pageVentilation Calculationjdcom_inNo ratings yet
- Mag Electric Understanding Induction MotorDocument5 pagesMag Electric Understanding Induction Motorjdcom_inNo ratings yet
- Durosite Series Led High Bay: For Industrial & Commercial ApplicationsDocument8 pagesDurosite Series Led High Bay: For Industrial & Commercial ApplicationsTiagohowpy RamosNo ratings yet
- NEC Article 620: Elevators, Part 1: Continuing Education: Codes & StandardsDocument10 pagesNEC Article 620: Elevators, Part 1: Continuing Education: Codes & StandardsMenaNo ratings yet
- Frequency Relay: 1MRS 750419-MBG Spaf 340 CDocument8 pagesFrequency Relay: 1MRS 750419-MBG Spaf 340 CBata ZivanovicNo ratings yet
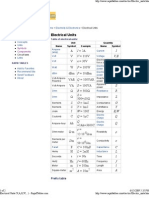
- Electrical Units Guide (V, A, Ω, WDocument2 pagesElectrical Units Guide (V, A, Ω, Wevtoma100% (1)
- Day 9 Notes Norton and Max PowerDocument7 pagesDay 9 Notes Norton and Max PowerSwaroop RamaswamyNo ratings yet
- PAC E100 110 Technical SpecV2 00 (060320)Document24 pagesPAC E100 110 Technical SpecV2 00 (060320)mkarimiloloNo ratings yet
- Numerical Relay For Overcurrent Protection Using TDocument7 pagesNumerical Relay For Overcurrent Protection Using Tanuj singhNo ratings yet
- Ground Fault Protection Ungrounded Systems To High Resistance Grounding Conversion GuideDocument12 pagesGround Fault Protection Ungrounded Systems To High Resistance Grounding Conversion GuideFelipe Prado100% (1)
- EC VIII Sem Television and RADAR EnggDocument2 pagesEC VIII Sem Television and RADAR Enggcrazy about reading0% (1)
- Centrix Cable Test Van System in 1 and 3 Phased Version DatasheetDocument4 pagesCentrix Cable Test Van System in 1 and 3 Phased Version DatasheetTri Ari WibowoNo ratings yet
- Generator DDDocument2 pagesGenerator DDalfredokpuNo ratings yet
- Manufacturing Data Sheet: Low Voltage XLPE Cable Design Code: LVIS09AXSFY23.5C120SA001S Date: Rev No.Document2 pagesManufacturing Data Sheet: Low Voltage XLPE Cable Design Code: LVIS09AXSFY23.5C120SA001S Date: Rev No.rajesh1200No ratings yet
- UPS User ManualDocument48 pagesUPS User Manualsomae AbbasNo ratings yet
- Instruction Manual GPX 4800-5000 (4901-0096-2) PDFDocument51 pagesInstruction Manual GPX 4800-5000 (4901-0096-2) PDFOmer AhmedNo ratings yet
- Huawei AlarmsDocument4 pagesHuawei AlarmsRicardoJorgeRodriguesRochaNo ratings yet
- Fiitjee Solution - Answer Keys - Nsep - 2022-23Document17 pagesFiitjee Solution - Answer Keys - Nsep - 2022-23Royal BedukoNo ratings yet
- Dokumen - Tips Internship Report 500 KV Grid StationDocument23 pagesDokumen - Tips Internship Report 500 KV Grid StationMuhammad zohaibNo ratings yet
- ITT American Electric Contempo Post Top Series 245 & 246 Spec Sheet 3-81Document8 pagesITT American Electric Contempo Post Top Series 245 & 246 Spec Sheet 3-81Alan MastersNo ratings yet
- Adtr 2K PLUS DS - 17Document4 pagesAdtr 2K PLUS DS - 17Jackson MokwatloNo ratings yet
- Concept Strengthening Sheet CSS 01 Based On AIATS 01 CF+OYM PhysicsDocument5 pagesConcept Strengthening Sheet CSS 01 Based On AIATS 01 CF+OYM PhysicsStudy in an easy wayNo ratings yet
- Basic Electrical Engineering GTU 3110005 (Mahajan) (GTURanker - Com)Document121 pagesBasic Electrical Engineering GTU 3110005 (Mahajan) (GTURanker - Com)kimuraaegonNo ratings yet
- Renr7947renr7947-03 - Sis C9con DeifeDocument4 pagesRenr7947renr7947-03 - Sis C9con DeifeMiloš StijeljaNo ratings yet
- IL230x-B110 Fieldbus Box Modules For EtherCATDocument2 pagesIL230x-B110 Fieldbus Box Modules For EtherCATmicaNo ratings yet
- Product Detail - RCFDocument1 pageProduct Detail - RCFRamadhani UtomoNo ratings yet
- KI - OSHD - Kidde Intelligent Optica Smoke and Heat DetectorDocument4 pagesKI - OSHD - Kidde Intelligent Optica Smoke and Heat DetectorGerardo GonZalezNo ratings yet
- Syncon Webinar 2020 Dec Presented 2020DECDocument34 pagesSyncon Webinar 2020 Dec Presented 2020DECmassimocalviNo ratings yet
- TR5 ArcWelding AlonzoDocument7 pagesTR5 ArcWelding AlonzoIsaiah Benjamin AlonzoNo ratings yet
- FM Global Property Loss Prevention Data Sheets: List of TablesDocument20 pagesFM Global Property Loss Prevention Data Sheets: List of TablesDhairyasheel PatilNo ratings yet
- 555 DC/DC Converter Generates Balanced Positive and Negative Supply VoltagesDocument1 page555 DC/DC Converter Generates Balanced Positive and Negative Supply Voltagestrmnmy100% (1)
- Name - Section - ENME 350: Electronics and Instrumentation IDocument3 pagesName - Section - ENME 350: Electronics and Instrumentation IErik GrantNo ratings yet