You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Quarter 3 Mathematics Lesson 55 57Document157 pagesQuarter 3 Mathematics Lesson 55 57Sheila Roxas100% (1)
- Worksheet 8: Algebraic Expressions (Term 2) Grade 8 MathematicsDocument2 pagesWorksheet 8: Algebraic Expressions (Term 2) Grade 8 MathematicsGreen MichaelsNo ratings yet
- Practice Set So LnsDocument39 pagesPractice Set So LnsGeo JosNo ratings yet
- Exercises to Applied Functional AnalysisDocument13 pagesExercises to Applied Functional AnalysispeterNo ratings yet
- Understanding Lefschetz PencilsDocument3 pagesUnderstanding Lefschetz PencilsJingyu Zhao AuroraNo ratings yet
- Solving word problems adding and subtracting fractions mixed numbersDocument6 pagesSolving word problems adding and subtracting fractions mixed numbersRJLeeYbañezNo ratings yet
- Divergence and Curl (Lecture 6)Document5 pagesDivergence and Curl (Lecture 6)BlessingNo ratings yet
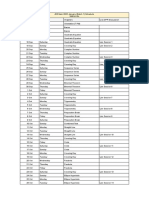
- Jee Main 2022 January (Batch 1) Schedule Mathongo Date Day Chapters Live DPP DiscussionDocument3 pagesJee Main 2022 January (Batch 1) Schedule Mathongo Date Day Chapters Live DPP DiscussionRakesh SharmaNo ratings yet
- Standard SOPDocument3 pagesStandard SOPDeanty Chibiechibie Spensa'cNo ratings yet
- 9.5a Integration by Trigonometric Substitution RayDocument12 pages9.5a Integration by Trigonometric Substitution RayHin Wa LeungNo ratings yet
- Deriving Almansi Strain in Terms of DisplacementDocument2 pagesDeriving Almansi Strain in Terms of DisplacementJohn Mark Go PayawalNo ratings yet
- Tos MathDocument2 pagesTos MathVenus Mantaring LastraNo ratings yet
- Obstructions To Algebraizing Topological Vector BundlesDocument17 pagesObstructions To Algebraizing Topological Vector BundlesThileni WickramaratneNo ratings yet
- Integrations of Hyperbolic Functions and Irrational FunctionsDocument18 pagesIntegrations of Hyperbolic Functions and Irrational FunctionscikguhafidzuddinNo ratings yet
- CfaDocument3 pagesCfaFerry BacharaNo ratings yet
- Lecture 24 (Matrix Chain Multiplication)Document17 pagesLecture 24 (Matrix Chain Multiplication)Almaz RizviNo ratings yet
- Rearrange FormulasDocument3 pagesRearrange FormulasAre TaNo ratings yet
- Practice Integration Math 120 Calculus IDocument4 pagesPractice Integration Math 120 Calculus IANAND PRAKASH DWIVEDINo ratings yet
- Exponent Laws ExplainedDocument2 pagesExponent Laws ExplainedKiki Eds100% (1)
- 0606 s10 QP 22Document8 pages0606 s10 QP 22Ling Sii NenNo ratings yet
- Che614 Introduction To Hydrodynamic Stability Assignment 2 Due Date: 18 August 2014 Elementary Theory of BifurcationsDocument1 pageChe614 Introduction To Hydrodynamic Stability Assignment 2 Due Date: 18 August 2014 Elementary Theory of BifurcationsAnnas FauzyNo ratings yet
- UQ MATH 1050 NotesDocument279 pagesUQ MATH 1050 NotesEwanNo ratings yet
- Calc 2 Cheat SheetDocument2 pagesCalc 2 Cheat Sheetvgc3491No ratings yet
- Grade 12 Mathematics School ActivitiesDocument113 pagesGrade 12 Mathematics School ActivitiesMichael AkintolaNo ratings yet
- Derivatives and Its Applications Lecture NotesDocument4 pagesDerivatives and Its Applications Lecture NotesS.m. ChandrashekarNo ratings yet
- Calculus Chapter on Definite IntegralsDocument23 pagesCalculus Chapter on Definite IntegralsAlisha VergaraNo ratings yet
- Singular Value Decomposition ExampleDocument5 pagesSingular Value Decomposition Exampledev1712100% (2)
- Boolean Algebra and Logic SimplificationDocument18 pagesBoolean Algebra and Logic SimplificationJulio Gabriel AseronNo ratings yet
- Math T Short Note (For Memory Flash Back Only)Document10 pagesMath T Short Note (For Memory Flash Back Only)Victor Hah Chang WahNo ratings yet
- Stress PresentationDocument26 pagesStress PresentationDhakshina KNo ratings yet