You might also like
- How To Upload Program From Cpu Using Simatic Manager - PLC BasicsDocument11 pagesHow To Upload Program From Cpu Using Simatic Manager - PLC BasicsMohamed Elsayed100% (1)
- College Entrance Exam Practice Test 1Document4 pagesCollege Entrance Exam Practice Test 1Jenny Rose S. Basa, LPTNo ratings yet
- W446-E1-12 CX-Programmer V9 Operation ManualDocument536 pagesW446-E1-12 CX-Programmer V9 Operation ManualAsri YadiNo ratings yet
- Tutorial Can PicDocument24 pagesTutorial Can Picjass1304100% (1)
- SM MultiV IV Air Outdoor Units 4 15 - 20150414080917Document150 pagesSM MultiV IV Air Outdoor Units 4 15 - 20150414080917Gino Waximinguirijillo Santana100% (3)
- Unidrive PDFDocument209 pagesUnidrive PDFAlejandra PerezNo ratings yet
- Basic Module MasterKDocument230 pagesBasic Module MasterKjalves_712355100% (1)
- Bab 8 Notes and Latihan Form 3 PtsiDocument15 pagesBab 8 Notes and Latihan Form 3 PtsiShanti Guna0% (1)
- Motion Control and Sinamics FamilyDocument34 pagesMotion Control and Sinamics FamilySetiaNo ratings yet
- Advance PLCDocument2 pagesAdvance PLCtarekamininfoNo ratings yet
- Sel1.5b eDocument27 pagesSel1.5b eaaditsivaprakashNo ratings yet
- CP1 eDocument326 pagesCP1 eFelipe Leiro AbalNo ratings yet
- 1day Plc2013 04 PLC ProgrammingDocument15 pages1day Plc2013 04 PLC ProgrammingasapNo ratings yet
- Inverter v20 Siemens ModbusDocument34 pagesInverter v20 Siemens ModbusAnh TúNo ratings yet
- Beckhoff and TwinCAT GuideDocument17 pagesBeckhoff and TwinCAT Guidevoltus88No ratings yet
- Finite Element Analysis of Steel CordDocument6 pagesFinite Element Analysis of Steel CordSanjiv Kumar SinghNo ratings yet
- Technology Objects For Motion ControlDocument19 pagesTechnology Objects For Motion ControlAngel AdautaNo ratings yet
- Hmi Comfort Panels Operating Instructions EnUS en-USDocument250 pagesHmi Comfort Panels Operating Instructions EnUS en-USYoussef MessaoudiNo ratings yet
- Revista Domus 771Document10 pagesRevista Domus 771Claudia TecuceanuNo ratings yet
- Timer SimaticDocument16 pagesTimer Simaticeman sulaemanNo ratings yet
- Cat 620 PDFDocument48 pagesCat 620 PDFVictor BugrovNo ratings yet
- T300Document56 pagesT300eng_karamazabNo ratings yet
- 239 ManDocument158 pages239 Mancristian gonzalezNo ratings yet
- Getting Started MC 10Document25 pagesGetting Started MC 10quochungkdNo ratings yet
- Encoders For Brushless Motor Commutation HEIDENHAINDocument3 pagesEncoders For Brushless Motor Commutation HEIDENHAINCristopher EntenaNo ratings yet
- PLCDocument21 pagesPLCThiagoLiraNo ratings yet
- SiemensDocument3 pagesSiemensHesham SharakyNo ratings yet
- Schneider Atv LiftDocument345 pagesSchneider Atv LiftjayNo ratings yet
- ShutDown WinCC V6 eDocument2 pagesShutDown WinCC V6 eSivaprasad KcNo ratings yet
- s120 Commissioning Manual Ih1 PDFDocument408 pagess120 Commissioning Manual Ih1 PDFPhạm Đức ThịnhNo ratings yet
- MaxDNA Contents - C2Document8 pagesMaxDNA Contents - C2dinkarbhel0% (1)
- V20 LaunchedDocument147 pagesV20 LaunchedNguyễn Viết HùngNo ratings yet
- 6ra70 PDFDocument232 pages6ra70 PDFChowdary MnchowdaryNo ratings yet
- CT Unidrive SP Size 0-6 User Guide - Issue 13 PDFDocument310 pagesCT Unidrive SP Size 0-6 User Guide - Issue 13 PDFjayb19840% (1)
- s7300 Cpu 31xc Technological Functions Operating Instructions en-US en-USDocument404 pagess7300 Cpu 31xc Technological Functions Operating Instructions en-US en-USNguyen Minh Thuong100% (1)
- VACON NX All in One Application Guide DPD00903H enDocument354 pagesVACON NX All in One Application Guide DPD00903H enSaasiNo ratings yet
- L&T Yaskawa AC DrivesDocument20 pagesL&T Yaskawa AC Drivesjunfa0% (1)
- Hướng dẫn sử dụng phần mềm PLC Mitsubishi GX DeveloperDocument6 pagesHướng dẫn sử dụng phần mềm PLC Mitsubishi GX DeveloperTan Phat NguyenNo ratings yet
- Sunell IP TrainingDocument34 pagesSunell IP TrainingVictor BitarNo ratings yet
- FM 350-2 - Counter Function ModuleDocument160 pagesFM 350-2 - Counter Function ModuleCristian SmarandacheNo ratings yet
- XC709D XC809D-EnglishDocument143 pagesXC709D XC809D-EnglishDian Rusdiana100% (1)
- LG Master K200S InstructionDocument267 pagesLG Master K200S InstructionPrayogaBudhi0% (1)
- Eurotherm 635Document79 pagesEurotherm 635cristiNo ratings yet
- Instrument Technician Faisal FarooqueDocument3 pagesInstrument Technician Faisal FarooqueDIJUNo ratings yet
- LSIS TrainningDocument101 pagesLSIS Trainningngocanh_songlong100% (1)
- Masterk Instructions ProgrammingDocument268 pagesMasterk Instructions Programmingmkspenang183055% (11)
- User Manual For PLC ProgrammingDocument458 pagesUser Manual For PLC ProgrammingSusanta royNo ratings yet
- Low Voltage Drive - SJ 700i (415V) (30 KW To 450 KW) CatalogueDocument12 pagesLow Voltage Drive - SJ 700i (415V) (30 KW To 450 KW) Cataloguemani_208ee100% (1)
- INJkon 03 2.0 ManualDocument15 pagesINJkon 03 2.0 ManualDavies SegeraNo ratings yet
- S5 100U Closed Loop ControlDocument154 pagesS5 100U Closed Loop Controlluis_h_t_79No ratings yet
- Manual ModCom M340Document216 pagesManual ModCom M340Vilson Martins GonçalvesNo ratings yet
- DCM Converter 0212 en PDFDocument554 pagesDCM Converter 0212 en PDFHa le QuangNo ratings yet
- Can Open Slave Software ManualDocument65 pagesCan Open Slave Software ManualSyed Mohammad NaveedNo ratings yet
- Tai Lieu XG5000Document48 pagesTai Lieu XG5000NguyễnThanhSangNo ratings yet
- AGI 4xx Installation Instructions 4189341102 UKDocument5 pagesAGI 4xx Installation Instructions 4189341102 UKJOSE LUIS CRISTANCHO100% (1)
- SIMATIC WinCC Professional V14Document1 pageSIMATIC WinCC Professional V14Pablo JaraNo ratings yet
- MD380 USER MANUAL (English Version)Document296 pagesMD380 USER MANUAL (English Version)Ingeniería AplicacionesNo ratings yet
- Lisa-Benutzerhandbuch: Aufbau Und Funktion (Teil A)Document150 pagesLisa-Benutzerhandbuch: Aufbau Und Funktion (Teil A)jhfbtyNo ratings yet
- st5098 e PDFDocument396 pagesst5098 e PDFLuís Miguel RomãoNo ratings yet
- Sinamics v20 Drive PDFDocument22 pagesSinamics v20 Drive PDFRavindra AngalNo ratings yet
- Cascada SubsincronaDocument7 pagesCascada Subsincronafrsantos123No ratings yet
- WEGSM1 ManualDocument15 pagesWEGSM1 Manualshinkentom2No ratings yet
- English GrammarDocument10 pagesEnglish GrammarFlo FlorinNo ratings yet
- Concordanta Timpurilor Si VB IndirectaDocument4 pagesConcordanta Timpurilor Si VB IndirectaFlo FlorinNo ratings yet
- Late Later The Latest Late Latter The Last Mary Latter LatestDocument2 pagesLate Later The Latest Late Latter The Last Mary Latter LatestFlo FlorinNo ratings yet
- Adjectives (The Degrees of Comparison)Document1 pageAdjectives (The Degrees of Comparison)Flo FlorinNo ratings yet
- 2021 Physicsbowl Exam Equations: Continued On Next PageDocument3 pages2021 Physicsbowl Exam Equations: Continued On Next PageThe Entangled Story Of Our WorldNo ratings yet
- TDS For Rubber Lining 1056HTDocument2 pagesTDS For Rubber Lining 1056HTYao WangNo ratings yet
- (IS) Conditioner For (IS) RVDT Sensor 690210266 (IS) : SensorexDocument2 pages(IS) Conditioner For (IS) RVDT Sensor 690210266 (IS) : SensorexShakir SarvaiyaNo ratings yet
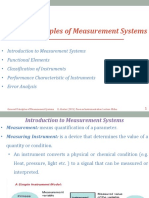
- General Principles of Measurement SystemsDocument21 pagesGeneral Principles of Measurement SystemsChelseaNo ratings yet
- 03 Combustor Dynamics Monitoring (CDM)Document9 pages03 Combustor Dynamics Monitoring (CDM)Luis Alonso Dipaz ZeaNo ratings yet
- GP335 SHDocument200 pagesGP335 SHJ.RamboNo ratings yet
- Mechanics of Solids Lab ManualDocument47 pagesMechanics of Solids Lab Manualravi03319100% (1)
- DKD-R - 6-1 2014Document39 pagesDKD-R - 6-1 2014japofff100% (1)
- View Interpolation For Image Synthesis: Shenchang Eric Chen, Lance Williams Apple Computer, IncDocument10 pagesView Interpolation For Image Synthesis: Shenchang Eric Chen, Lance Williams Apple Computer, IncPiyush JainNo ratings yet
- MKN Hansdampf Cge12 eDocument2 pagesMKN Hansdampf Cge12 eRumen PavlovNo ratings yet
- Robinson VacDocument10 pagesRobinson VacJajajaNo ratings yet
- Advances in Motor Torque Control PDFDocument122 pagesAdvances in Motor Torque Control PDFTasos PoteasNo ratings yet
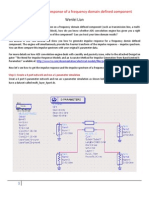
- Impulse Response of Frequency Domain ComponentDocument17 pagesImpulse Response of Frequency Domain Componentbubo28No ratings yet
- PDMS Thickness VS Spin SpeedDocument2 pagesPDMS Thickness VS Spin SpeedGopal Chandra PalNo ratings yet
- Mathematics - Ijmcar - An Approach For Continuous Method For The GeneralDocument12 pagesMathematics - Ijmcar - An Approach For Continuous Method For The GeneralTJPRC PublicationsNo ratings yet
- Planning For Urban Scale Photovoltaic SystemsDocument43 pagesPlanning For Urban Scale Photovoltaic SystemsRoseRosaNo ratings yet
- Lecture 3 - Curves in Space and Their TangentDocument38 pagesLecture 3 - Curves in Space and Their TangentNURUL YAHSIFAH SYQELLA BINTI YAHYA BK21110100No ratings yet
- Op Protection KIDocument5 pagesOp Protection KIDragan IlicNo ratings yet
- Experimental and Numerical Analysis of Steel and Fiber-Reinforced Polymer Concrete Beams Under Transverse LoadDocument14 pagesExperimental and Numerical Analysis of Steel and Fiber-Reinforced Polymer Concrete Beams Under Transverse LoadErnie SitanggangNo ratings yet
- Force Relations and Dynamics of Cutting Knife in A Vertical Disc Mobile Wood Chipper - Leonardo El J Pract TechnolDocument14 pagesForce Relations and Dynamics of Cutting Knife in A Vertical Disc Mobile Wood Chipper - Leonardo El J Pract TechnolNguyenHuanNo ratings yet
- Distance DisplacementDocument4 pagesDistance DisplacementRuchi Briam James LagitnayNo ratings yet
- 55 4 2 PhysicsDocument27 pages55 4 2 PhysicsSriramNo ratings yet
- Rotational Dynamics: Physics 101Document10 pagesRotational Dynamics: Physics 101learningboxNo ratings yet
- A Handbook of Minerals, Crystals, Rocks and Ores by Pramod O. AlexanderDocument22 pagesA Handbook of Minerals, Crystals, Rocks and Ores by Pramod O. AlexanderBee PshNo ratings yet
- Safty Switch 3TK2825Document46 pagesSafty Switch 3TK2825Amir KeikavoosnejadNo ratings yet