You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 2012 Rite Aid Cleveland Marathon Results BookDocument129 pages2012 Rite Aid Cleveland Marathon Results BookCleveland MarathonNo ratings yet
- Sap Etm - Fi PerspectiveDocument33 pagesSap Etm - Fi Perspectivemoorthykem100% (1)
- Flight Management ComputerDocument19 pagesFlight Management ComputerNarablues IndonesiaNo ratings yet
- Managerial Accounting Creating Value in A Dynamic Business Environment 11th Edition Hilton Solutions ManualDocument36 pagesManagerial Accounting Creating Value in A Dynamic Business Environment 11th Edition Hilton Solutions Manualrenewerelamping1psm100% (23)
- Moment of Truth EYDocument44 pagesMoment of Truth EYCud PhNo ratings yet
- First Contact With The Helicopter: For Instruction OnlyDocument22 pagesFirst Contact With The Helicopter: For Instruction OnlyFrancisco Saez MoraNo ratings yet
- Presentasi Cabang Scania Bus 2016Document11 pagesPresentasi Cabang Scania Bus 2016Mulyadi Tarchani100% (1)
- Data Diri KaryawanDocument19 pagesData Diri KaryawanAldi SaputraNo ratings yet
- Indian Ocean Politics PDFDocument21 pagesIndian Ocean Politics PDFAsma RaisNo ratings yet
- McodesDocument4 pagesMcodesMichele FarnumNo ratings yet
- Scaffold Ladder Safety 1569604009Document128 pagesScaffold Ladder Safety 1569604009eerrddeemmNo ratings yet
- TRANSPORTATION LAW Tables PDFDocument4 pagesTRANSPORTATION LAW Tables PDFJha NizNo ratings yet
- Types of Automated Parking System-2Document8 pagesTypes of Automated Parking System-2محمد عبدهNo ratings yet
- Civil Engineering - RailwaysDocument24 pagesCivil Engineering - RailwaysWojciech Czerwiński60% (5)
- Cycling Bug ManualDocument71 pagesCycling Bug ManualBrodie McCullochNo ratings yet
- EnduranceDocument75 pagesEnduranceSameer Negi100% (2)
- 50mm Thick Lean ConcreteDocument2 pages50mm Thick Lean Concrete104 projectNo ratings yet
- Wheel Horse by YearDocument14 pagesWheel Horse by YearNeil SmallwoodNo ratings yet
- Detailed Feasibility ReportDocument200 pagesDetailed Feasibility Reportalim shaikhNo ratings yet
- 2.7 - QAP - Quality Assurance Plan PDFDocument12 pages2.7 - QAP - Quality Assurance Plan PDFGeorge JhonsonNo ratings yet
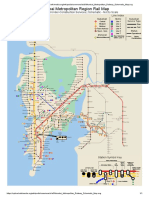
- Mumbai Metropolitan Railway Schematic MapDocument1 pageMumbai Metropolitan Railway Schematic MapDeepaNo ratings yet
- Design and Simulation of A Railway Vehicle For TheDocument15 pagesDesign and Simulation of A Railway Vehicle For TheMustafa SahinNo ratings yet
- Assignment No. 1Document20 pagesAssignment No. 1Rio LorraineNo ratings yet
- Mounting Systems For Solar TechnologyDocument8 pagesMounting Systems For Solar TechnologyArmin HajdarovićNo ratings yet
- CMS PDFDocument5 pagesCMS PDFRecordTrac - City of OaklandNo ratings yet
- 3 Course StudiesDocument16 pages3 Course Studiestaz_taz3No ratings yet
- Inventory Management at Indus Motors PakistanDocument26 pagesInventory Management at Indus Motors PakistanSufyan Ali50% (2)
- Brenton Suites Crane Collapse ReportDocument12 pagesBrenton Suites Crane Collapse ReportNuragus HariyadiNo ratings yet
- Ra 4136Document8 pagesRa 4136'marinel ÜüNo ratings yet
- Fleet Safety EbookDocument16 pagesFleet Safety EbookSrikanth BammhideNo ratings yet