Professional Documents
Culture Documents
Kinetix 6000
Uploaded by
Victor Antonio Malhue VilchesCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Kinetix 6000
Uploaded by
Victor Antonio Malhue VilchesCopyright:
Available Formats
Instrucciones de instalacin
Servovaridor multiejes Kinetix 6000
Nmeros de catlogo 2094-ACxx-Mxx, 2094-BCxx-Mxx 2094-ACxx-Mxx-S, 2094-BCxx-Mxx-S 2094-AMxx, 2094-BMxx 2094-AMxx-S, 2094-BMxx-S 2094-BSP2
Tema Informacin importante para el usuario Acerca de esta publicacin Explicacin de nmeros de catlogo Antes de comenzar Planifique la instalacin Instale el variador Kinetix 6000 Datos de los conectores Conecte la alimentacin elctrica Ejemplos de cableado Configure el IAM/AM Configure el mdulo Logix SERCOS interface Conecte la alimentacin elctrica al variador Kinetix 6000 Pruebe y ajuste los ejes Interprete los indicadores de estado Especificaciones Recursos adicionales
Pgina 2 3 3 4 6 12 18 29 36 58 62 71 74 79 90 99
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
Informacin importante para el usuario
Los equipos de estado slido tienen caractersticas de funcionamiento diferentes a las de los equipos electromecnicos. El documento Safety Guidelines for the Application, Installation and Maintenance of Solid State Controls (publicacin SGI-1.1 disponible en la oficina de ventas local de Rockwell Automation o en lnea en http://literature.rockwellautomation.com) describe algunas diferencias importantes entre los equipos de estado slido y los dispositivos electromecnicos de lgica cableada. Debido a esta diferencia y a la amplia variedad de usos de los equipos de estado slido, todas las personas responsables de la aplicacin de este equipo debern verificar que el mismo satisfaga los requisitos para la aplicacin especfica deseada. En ningn caso Rockwell Automation, Inc. responder ni ser responsable por daos indirectos o consecuentes que resulten del uso o la aplicacin de este equipo. Los ejemplos y diagramas presentados en este manual se incluyen solamente con fines ilustrativos. Debido a los numerosos requisitos y variables relacionados con cualquier instalacin en particular, Rockwell Automation, Inc., no puede hacerse responsable ni asumir obligaciones por el uso de equipos basado en ejemplos y diagramas. Rockwell Automation, Inc. no asume ninguna obligacin de patente respecto al uso de la informacin, circuitos, equipo o software descritos en este manual. Se prohbe la reproduccin total o parcial del contenido de este manual sin la autorizacin por escrito de Rockwell Automation, Inc. Este manual contiene notas de seguridad en cada circunstancia en que se estimen necesarias.
ADVERTENCIA
Identifica informacin referente a prcticas o circunstancias que pueden causar una explosin en un entorno peligroso, lo cual puede provocar lesiones o la muerte, daos materiales o prdidas econmicas. Identifica informacin vital para la correcta aplicacin y comprensin del producto. Srvase tomar nota de que en esta publicacin se usa el punto decimal para separar la parte entera de la decimal de todos los nmeros. Identifica informacin referente a prcticas o circunstancias que pueden provocar lesiones o la muerte, daos materiales o prdidas econmicas. Los mensajes de Atencin le ayudan a identificar un peligro, evitar un peligro y estar consciente de las consecuencias. En el equipo o dentro del mismo puede haber etiquetas (por ejemplo en un variador o motor) para advertir sobre la posible presencia de un voltaje peligroso. En el equipo o dentro del mismo puede haber etiquetas (por ejemplo, en un variador o motor) a fin de advertir sobre superficies que pueden estar a temperaturas peligrosas.
IMPORTANTE
ATENCIN
PELIGRO DE CHOQUE
PELIGRO DE QUEMADURA
Allen-Bradley, CompactLogix, ControlLogix, Kinetix, Logix5000, Rockwell Automation, RSLogix, RSLogix 5000, SCANport y SoftLogix son marcas comerciales de Rockwell Automation, Inc. Las marcas comerciales que no pertenecen a Rockwell Automation son propiedad de sus respectivas empresas.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
Acerca de esta publicacin
Esta publicacin proporciona informacin bsica para instalar y verificar el estado de operacin del variador Kinetix 6000 y el servomotor compatible. Para obtener informacin detallada con ejemplos de montaje y cableado, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001. Para obtener informacin de instalacin respecto a equipos y accesorios no incluida en el presente documento, consulte Recursos adicionales en la pgina 99 o la informacin disponible acerca de dichos productos.
Explicacin de nmeros de catlogo
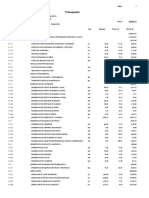
Los nmeros de catlogo y descripciones de los productos Kinetix 6000 se listan en la tabla siguiente.
Nmeros de catlogo de variadores Kinetix 6000
Mdulos de eje integrado (230 V) Kinetix 6000, IAM, 230 V, convertidor de 3 kW, inversor de 5 A Kinetix 6000, IAM, 230 V, convertidor de 3 kW, inversor de 9 A Kinetix 6000, IAM, 230 V, convertidor de 6 kW, inversor de 15 A
Nmero de catlogo (con funcin de desactivacin segura) 2094-AC05-MP5-S 2094-AC05-M01-S 2094-AC09-M02-S
Nmero de catlogo (sin funcin de desactivacin segura) 2094-AC05-MP5 2094-AC05-M01 2094-AC09-M02 2094-AC16-M03 2094-AC32-M05
Kinetix 6000, IAM, 230 V, convertidor de 11 kW, inversor de 24 A 2094-AC16-M03-S Kinetix 6000, IAM, 230 V, convertidor de 23 kW, inversor de 49 A 2094-AC32-M05-S Mdulos de eje integrado (460 V) Kinetix 6000, IAM, 460 V, convertidor de 6 kW, inversor de 4 A Kinetix 6000, IAM, 460 V, convertidor de 6 kW, inversor de 9 A 2094-BC01-MP5-S 2094-BC01-M01-S
2094-BC01-MP5 2094-BC01-M01 2094-BC02-M02 2094-BC04-M03 2094-BC07-M05
Kinetix 6000, IAM, 460 V, convertidor de 15 kW, inversor de 15 A 2094-BC02-M02-S Kinetix 6000, IAM, 460 V, convertidor de 28 kW, inversor de 30 A 2094-BC04-M03-S Kinetix 6000, IAM, 460 V, convertidor de 45 kW, inversor de 49 A 2094-BC07-M05-S Mdulos de eje (230 V) Kinetix 6000, AM, 230 V, 5 A Kinetix 6000, AM, 230 V, 9 A Kinetix 6000, AM, 230 V, 15 A Kinetix 6000, AM, 230 V, 24 A Kinetix 6000, AM, 230 V, 49 A Mdulos de eje (460 V) Kinetix 6000, AM, 460 V, 4 A Kinetix 6000, AM, 460 V, 9 A Kinetix 6000, AM, 460 V, 15 A Kinetix 6000, AM, 460 V, 30 A Kinetix 6000, AM, 460 V, 49 A Mdulo de derivacin Kinetix 6000, SM, 230 V/460 V, 200 W N/A 2094-BMP5-S 2094-BM01-S 2094-BM02-S 2094-BM03-S 2094-BM05-S 2094-AMP5-S 2094-AM01-S 2094-AM02-S 2094-AM03-S 2094-AM05-S
2094-AMP5 2094-AM01 2094-AM02 2094-AM03 2094-AM05
2094-BMP5 2094-BM01 2094-BM02 2094-BM03 2094-BM05
2094-BSP2
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
Antes de comenzar
Usted, el cliente, es responsable de inspeccionar el equipo antes de aceptar el envo de la empresa de transporte. Si descubre algn dao oculto durante el desempaque, usted es responsable de notificarlo al agente de la empresa de transporte.
Lista de piezas
Quite todo el material de desembalaje, cuas y soportes que haya dentro y alrededor de los componentes. Tras desembalarlo, compruebe que el nmero de catlogo indicado en la placa del fabricante del artculo corresponde al que aparece en la orden de compra.
Componente del variador Se enva con Conectores de cableado para voltaje de alimentacin de entrada de CA principal (IPD), voltaje de alimentacin de entrada de CA de control (CPD), rel de habilitacin de contactor (CED), alimentacin del motor (MP) y alimentacin de motor/freno resistivo (BC). Mdulo de eje integrado (IAM) Cabezal de enchufe de cableado (2090-XNSS-WP) para conector de desactivacin segura (SO) y puente de movimiento permitido (2090-XNSS-MA). Un CD con documentacin y diagramas CAD para configuracin del panel. Documento Installation Instructions, publicacin 2094-IN001. Conectores de cableado para alimentacin del motor (MP) y alimentacin de freno resistivo/motor (BC). Mdulo de eje (AM) Cabezal de enchufe de cableado (2090-XNSS-WP) para conector de desactivacin segura (SO) y puente de movimiento permitido (2090-XNSS-MA). Documento Installation Instructions, publicacin 2094-IN004. Conector de cableado para una resistencia de derivacin externa (RC). Mdulo de derivacin (SM) Conector de cableado para el interruptor trmico (TS). Documento Installation Instructions, publicacin 2094-IN004.
Los conectores del motor, los de retroalimentacin auxiliar y los de E/S no se proporcionan. Consulte el documento Kinetix Motion Control Selection Guide, publicacin GMC-SG001, para obtener los nmeros de catlogo de los juegos de conectores.
Cumplimiento de los requisitos de CE
ATENCIN
Para cumplir con las especificaciones de CE se requiere un sistema con conexin a tierra, y los mtodos de conexin a tierra del filtro de lnea de CA y del variador deben coincidir. El no observar esta indicacin afectar la eficacia del filtro y podra ocasionar dao al filtro. Para obtener ejemplos de conexin a tierra, consulte la seccin Determine el tipo de alimentacin de entrada en la pgina 29.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
Para obtener ms informacin sobre la reduccin del ruido elctrico, consulte el documento System Design for Control of Electrical Noise Reference Manual, publicacin GMC-RM001.
Requisitos de CE (sistema sin LIM)
Para cumplir con las especificaciones de CE cuando su sistema Kinetix 6000 no incluye el mdulo de interface de lnea (LIM), se aplican los siguientes requisitos. Instale un filtro de lnea de CA (2090-XXLF-xxxx) tan cerca como sea posible del mdulo de eje integrado (IAM). Use cables de alimentacin elctrica de motor serie 2090 juegos de conectores, y conecte los blindajes del cable a la abrazadera del chasis provista. La longitud combinada de los cables de alimentacin elctrica de motor en el mismo bus de CC no debe exceder de 240 m (787 pies) con sistemas de 460 V o de 160 m (525 pies) con sistemas de 230 V. Los cables de alimentacin del variador al motor no deben exceder de 90 m (295.5 pies). Use cables de retroalimentacin de motor serie 2090 juegos de conectores, y conecte debidamente el blindaje del cable de retroalimentacin. Los cables de retroalimentacin del variador al motor no deben exceder de 90 m (295.5 pies). Instale el sistema Kinetix 6000 dentro de un envolvente. Tienda el cableado de alimentacin de entrada en una canaleta (conectado a la tierra del envolvente) fuera del envolvente. Separe los cables de seales y de alimentacin elctrica.
Consulte las instrucciones de cableado en el documento Kinetix 6000 User Manual, publicacin 2094-UM001, y los nmeros de catlogo en el documento Kinetix Motion Control Selection Guide, publicacin GMC-SG001.
Requisitos de CE (sistema con LIM)
Para cumplir con los requisitos CE cuando su sistema Kinetix 6000 incluye el mdulo de interface de lnea (LIM), siga todas las especificaciones indicadas en la seccin Requisitos de CE (sistema sin LIM) y estas especificaciones adicionales que se aplican al filtro de lnea de CA. Instale el LIM (2094-AL09 -BL02) tan cerca como sea posible del mdulo de eje integrado (IAM). Instale el LIM (2094-ALxxS, -BLxxS o -XL75S-Cx) con filtro de lnea (2090-XXLF-xxxx) tan cerca como sea posible del IAM. Cuando el LIM (2094-ALxxS, -BLxxS o -XL75S-Cx) acepta dos IAM, cada IAM requiere un filtro de lnea de CA instalado tan cerca como sea posible del IAM.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
Planifique la instalacin
Use la informacin que aparece en esta seccin para disear su envolvente y montar los componentes del sistema en el panel. Para obtener ms informacin, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001. Para consultar en lnea la seleccin de productos y herramientas de configuracin, incluidos los planos en Autocad (DXF) del producto, visite http://www.ab.com/e-tools.
Requisitos de montaje del sistema
El Kinetix 6000 debe instalarse en un envolvente conductor con conexin a tierra que ofrezca la proteccin definida en el estndar EN 60529 (IEC 529) para IP55, de modo que no estn accesibles a un operador o persona no entrenada, a fin de cumplir con los requisitos de UL y CE. Un envolvente NEMA 4X excede estos requisitos por lo que proporciona proteccin segn IP66. El panel que usted instale dentro del envolvente para montar los componentes del sistema debe estar situado sobre una superficie plana, rgida y vertical no sujeta a choque, vibracin, humedad, nebulizaciones aceitosas, polvo ni vapores corrosivos. El tamao del envolvente debe ser el adecuado para no exceder la clasificacin de temperatura ambiente mxima. Considere las especificaciones de disipacin de calor de todos los componentes del variador. Separe el cableado de alimentacin de entrada y los cables de alimentacin elctrica de motor, del cableado de control y los cables de retroalimentacin del motor. Use cable blindado para el cableado de alimentacin elctrica y proporcione una terminacin de abrazadera de 360 con conexin a tierra. Use tcnicas de conexin equipotencial de alta frecuencia (HF) para conectar los mdulos, el envolvente, la estructura de la mquina y el envolvente del motor, y para proporcionar un trayecto de retorno de baja impedancia a la energa de alta frecuencia (HF) y reducir el ruido elctrico. Consulte el documento System Design for Control of Electrical Noise Reference Manual, publicacin GMC-RM001, para comprender mejor el concepto de reduccin de ruido elctrico.
IMPORTANTE
Para mejorar la conexin equipotencial entre el riel de alimentacin elctrica y el subpanel, construya el subpanel de acero cincado (sin pintura).
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
Requisitos mnimos de espacio libre
Esta seccin proporciona informacin para ayudarle a dimensionar su gabinete y a ubicar los componentes de su sistema Kinetix 6000.
IMPORTANTE
Monte el mdulo en posicin vertical. El mdulo no puede montarse en posicin horizontal.
Requisitos mnimos de espacio libre
Espacio libre por encima para flujo de aire e instalacin
Mdulo de eje integrado (IAM) (2094-AC05-Mxx se muestra montado sobre el riel de alimentacin elctrica)
No se requiere espacio libre a la izquierda del mdulo (1)
No se requiere espacio libre a la derecha del mdulo (1)
Riel de alimentacin elctrica (se muestra el 2094-PRSx)
(1)
Espacio libre por debajo para flujo de aire e instalacin
El riel de alimentacin elctrica (delgado), nmero de catlogo 2094-PRSx, no se extiende a la izquierda o a la derecha del primer o ltimo mdulo (respectivamente). Cuando se usa el riel de alimentacin elctrica (nmero de catlogo 2094-PRx), ste se extiende aproximadamente 25.4 mm (1.0 pulg.) a la izquierda del IAM y a la derecha del ltimo mdulo montado en el riel.
Dimensiones mnimas de espacio libre
N. de cat. 2094-AC05, -AC09, -AMP5, -AM01, -AM02 2094-BC01, -BC02, -BMP5, -BM01, -BM02 2094-BSP2 2094-AC16, -AC32, -AM03, -AM05 2094-BC04, -BC07, -BM03, -BM05 305 mm (12.0 pulg.) 50.8 mm (2.0 pulg.) 50.8 mm (2.0 pulg.) 50.8 mm (2.0 pulg.) Espacio libre por encima, mn. Espacio libre por debajo, mn. Espacio libre en la profundidad del gabinete, mn. 200 mm (7.9 pulg.) 272 mm (10.7 pulg.) 200 mm (7.9 pulg.) 272 mm (10.7 pulg.)
IMPORTANTE
Si bien no se necesita dejar espacio libre a la izquierda y a la derecha del riel de alimentacin elctrica para ventilacin, se requiere espacio libre adicional cuando el montaje se realiza junto a equipos sensibles al ruido o canaletas portacables no blindadas.
Consulte en la pgina 94 las especificaciones de disipacin de energa.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
Dimensiones del producto
Dimensiones del mdulo de eje integrado 2094-AC05-MP5-S, AC05-M01-S y -AC09-M02-S (230 V) 2094-BC01-MP5-S, -BC01-M01-S y -BC02-M02-S (460 V)
A B 20 (0.8) 8.9 (0.35)
Las dimensiones se proporcionan en milmetros (pulgadas).
125 (4.9)
2094-AC05-M01-S (230 V) (mostrado)
F E
D
Riel de alimentacin elctrica
2090-XXNFxx-Sxx (conductor libre) Cable de retroalimentacin con juego de conectores de bajo perfil 2090-K6CK-D15Mxx
62 (2.45)
Esta ilustracin muestra el espacio libre adicional requerido para conectores de cable premoldeados.
Importante: Se requiere espacio libre adicional por debajo del conector para proporcionar el radio de flexin recomendado para el cable.
Cable de retroalimentacin 2090-UXNFBxx-Sxx (conector premoldeado)
Los mdulos se muestran montados al riel de alimentacin elctrica y las dimensiones lo reflejan en la profundidad del mdulo.
Dimensiones del IAM
Kinetix 6000 IAM 2094-AC05-MP5-S 2094-AC05-M01-S 2094-AC09-M02-S 2094-BC01-MP5-S 2094-BC01-M01-S 2094-BC02-M02-S 272 (10.7) 249 (9.8) 0 (0) 256 (10.1) 281 (11.0) 198 (7.8) 176 (7.0) 51 (2.0) 206 (8.2) 231 (9.1) A mm (pulg.) B mm (pulg.) D mm (pulg.) E mm (pulg.) F mm (pulg.)
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
Dimensiones del mdulo de eje integrado 2094-AC16-M03-S y -AC32-M05-S (230 V) 2094-BC04-M03-S y -BC07-M05-S (460 V)
A B 8.9 (0.35)
Las dimensiones se proporcionan en milmetros (pulgadas).
Se muestra el 2094-BC04-M03-S (460 V)
Riel de alimentacin elctrica
Cable de retroalimentacin 2090-XXNFxx-Sxx (conductor libre) con juego de conectores de bajo perfil 2090-K6CK-D15Mxx
62 (2.45)
Esta ilustracin muestra el espacio libre adicional requerido para conectores de cable premoldeados.
Importante: Se requiere espacio libre adicional debajo del conector para proporcionar el radio de flexin recomendado para el cable.
Cable de retroalimentacin 2090-UXNFBxx-Sxx (conector premoldeado)
Los mdulos se muestran montados al riel de alimentacin elctrica y las dimensiones lo reflejan en la profundidad del mdulo.
Dimensiones del IAM
Kinetix 6000 IAM 2094-AC16-M03-S 2094-AC32-M05-S 2094-BC04-M03-S 2094-BC07-M05-S A mm (pulg.) 198 (7.8) B mm (pulg.) 176 (7.0) C mm (pulg.) 125 (4.9) 196 (7.7) 196 (7.7) E mm (pulg.) 302 (11.9) 256 (10.1) 318 (12.5) F mm (pulg.) 420 (16.5) 374 (14.7) 436 (17.2)
272 (10.7)
249 (9.8)
Publicacin 2094-IN001H-ES-P Julio de 2006
10
Servovaridor multiejes Kinetix 6000
Dimensiones del mdulo de eje 2094-AMP5-S, -AM01-S y -AM02-S (230 V) 2094-BMP5-S, -BM01-S y -BM02-S (460 V)
A B 20 (0.8)
Las dimensiones se proporcionan en milmetros (pulgadas).
70 (2.76)
8.9 (0.35)
F
Se muestra el 2094-AM01-S (230 V)
D
Riel de alimentacin elctrica
2090-XXNFxx-Sxx (conductor libre) Cable de retroalimentacin con juego de conectores de bajo perfil 2090-K6CK-D15Mxx
62 (2.45)
Esta ilustracin muestra el espacio libre adicional requerido para conectores de cable premoldeados.
Importante: Se requiere espacio libre adicional debajo del conector para proporcionar el radio de flexin recomendado para el cable.
Cable de retroalimentacin 2090-UXNFBxx-Sxx (conector premoldeado)
Los mdulos se muestran montados al riel de alimentacin elctrica y las dimensiones lo reflejan en la profundidad del mdulo.
Dimensiones del AM
Kinetix 6000 AM 2094-AMP5-S 2094-AM01-S 2094-AM02-S 2094-BMP5-S 2094-BM01-S 2094-BM02-S 272 (10.7) 249 (9.8) 0 (0) 256 (10.1) 281 (11.0) 198 (7.8) 176 (7.0) 51 (2.0) 206 (8.2) 231 (9.1) A mm (pulg.) B mm (pulg.) D mm (pulg.) E mm (pulg.) F mm (pulg.)
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
11
Dimensiones del mdulo de eje 2094-AM03-S y -AM05-S (230 V) 2094-BM03-S y -BM05-S (460 V)
A B 8.9 (0.35)
Las dimensiones se proporcionan en milmetros (pulgadas).
Se muestra el 2094-BM03-S (460 V)
Riel de alimentacin elctrica
Cable de retroalimentacin 2090-XXNFxx-Sxx (conductor libre) con juego de conectores de bajo perfil 2090-K6CK-D15Mxx
62 (2.45)
Esta ilustracin muestra el espacio libre adicional requerido para conectores de cable premoldeados.
Importante: Se requiere espacio libre adicional debajo del conector para proporcionar el radio de flexin de cable recomendado.
Cable de retroalimentacin 2090-UXNFBxx-Sxx (conector premoldeado)
Los mdulos se muestran montados al riel de alimentacin elctrica y las dimensiones lo reflejan en la profundidad del mdulo.
Dimensiones del AM
Kinetix 6000 AM 2094-AM03-S 2094-AM05-S 2094-BM03-S 2094-BM05-S A mm (pulg.) 198 (7.8) B mm (pulg.) 176 (7.0) C mm (pulg.) 70 (2.8) E mm (pulg.) 302 (11.9) 256 (10.1) 318 (12.5) F mm (pulg.) 420 (16.5) 374 (14.7) 436 (17.2)
272 (10.7)
249 (9.8)
141 (5.5)
Publicacin 2094-IN001H-ES-P Julio de 2006
12
Servovaridor multiejes Kinetix 6000
Dimensiones del mdulo de derivacin 2094-BSP2
263 (10.3) 20 (0.8) 123 (4.8) 70 (2.76) 43 (1.7)
249 (9.8)
Las dimensiones se proporcionan en milmetros (pulgadas).
20 (0.8)
281 (11.0)
256 (10.1)
Riel de alimentacin elctrica
Los mdulos se muestran montados al riel de alimentacin elctrica y las dimensiones lo reflejan en la profundidad del mdulo.
Instale el variador Kinetix 6000
Los procedimientos descritos en esta seccin suponen que usted prepar su panel y entiende cmo conectar equipotencialmente su sistema. Para obtener instrucciones de instalacin respecto a equipos y accesorios no incluidas en el presente documento, consulte las instrucciones incluidas con dichos productos. Planifique la instalacin de su sistema de modo que pueda realizar todas las operaciones de corte, perforacin, roscado y soldadura con el sistema fuera del envolvente. Debido a que el sistema es de tipo abierto, tenga cuidado para que no caigan residuos metlicos en el interior. Los residuos metlicos u otras materias extraas pueden depositarse en el circuito, lo cual puede daar los componentes.
ATENCIN
Se puede usar soportes de montaje Boletn 2094 para montar el riel de alimentacin elctrica o el LIM sobre el filtro de lnea de CA. Consulte el documento 2094 Mounting Brackets Installation Instructions, publicacin 2094-IN008, cuando use soportes de montaje con su sistema de variador Kinetix 6000.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
13
El riel de alimentacin elctrica Kinetix 6000 viene en diversas longitudes para soportar un IAM y hasta siete mdulos de eje (AM) adicionales o un mdulo de derivacin (SM). Los pines del conector para cada ranura estn cubiertos por forro protector. El forro protector est diseado para proteger los pines contra daos y para asegurar que no se depositen materias extraas entre los pines durante la instalacin. Consulte el documento Kinetix 6000 Power Rail Installation Instructions, publicacin 2094-IN003, cuando instale el riel de alimentacin elctrica. Para evitar daar el riel de alimentacin elctrica durante la instalacin, no quite los forros protectores hasta que el mdulo para cada ranura est listo para el montaje.
ATENCIN
Determine el orden de montaje
Monte los mdulos IAM, AM, SM y el de relleno de ranura (PRF) en orden (de izquierda a derecha) como se muestra en la siguiente figura. Monte los mdulos de eje segn el consumo de alimentacin elctrica (de ms alto a ms bajo) de izquierda a derecha, comenzando con el de mayor consumo de alimentacin elctrica. Si se desconoce el consumo de alimentacin elctrica, coloque los mdulos de eje (de mayor a menor) de izquierda a derecha segn la especificacin de amperaje.
Orden de montaje de los mdulos
Ms alto consumo de alimentacin elctrica o especificacin de amperaje Mdulo de eje integrado 2094-AC09-M02 Mdulo de eje 2094-AM02 Ms bajo consumo de alimentacin elctrica o especificacin de amperaje Mdulo de eje 2094-AM01 Mdulo de eje 2094-AM01 Mdulo de derivacin 2094-BSP2 Mdulo de tapa ciega 2094-PRF
Mdulo de eje Mdulo de eje 2094-AM02 2094-AM02
Publicacin 2094-IN001H-ES-P Julio de 2006
14
Servovaridor multiejes Kinetix 6000
IMPORTANTE
El IAM debe colocarse en la ranura del extremo izquierdo del riel de alimentacin elctrica. Coloque sus mdulos de eje, el mdulo de derivacin y las tapas ciegas a la derecha del IAM. El mdulo de derivacin 2094 debe instalarse a la derecha del ltimo mdulo de eje. A la derecha del mdulo de derivacin slo pueden instalarse mdulos de tapa ciega. No monte el mdulo de derivacin 2094 en rieles de alimentacin elctrica con un IAM seguidor. Los IAM seguidores de bus comn inhabilitarn los mdulos de derivacin internos, los montados en riel y los externos. Para evitar lesiones personales debido a choque elctrico, coloque el mdulo de tapa ciega (nmero de catlogo 2094-PRF) en toda ranura vaca del riel de alimentacin elctrica. Cualquier conector de riel de alimentacin elctrica sin un mdulo instalado inhabilitar el sistema Kinetix 6000; sin embargo, la alimentacin de control continuar presente.
PELIGRO DE CHOQUE
Monte los mdulos
En estos diagramas se muestra un IAM para ilustrar el montaje correcto; sin embargo, todos los mdulos se montan al riel de alimentacin elctrica usando la misma tcnica. Siga estos pasos para montar los mdulos IAM, AM, SM y PRF. 1. Quite los forros protectores de los conectores del riel de alimentacin elctrica.
IMPORTANTE
El IAM debe colocarse en la ranura del extremo izquierdo del riel de alimentacin elctrica. Coloque sus mdulos de eje, el mdulo de derivacin y las tapas ciegas a la derecha del IAM.
2. Determine cul es la siguiente ranura disponible y el mdulo para el montaje. 3. Quite la etiqueta (adherida a la parte posterior y lateral del mdulo) que cubre los pines que se acoplan con el riel de alimentacin elctrica. Para evitar daar los pines ubicados en la parte posterior de cada mdulo (IAM, AM, SM y PRF) y para asegurarse de que los pines del mdulo se acoplen correctamente con el riel de alimentacin elctrica, cuelgue los mdulos como se muestra en los pasos 4...7.
ATENCIN
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
15
4. Cuelgue el soporte de montaje desde la ranura en el riel de alimentacin elctrica.
Soporte de montaje
Ranura para riel de alimentacin elctrica
Ranuras para mdulos de eje, mdulo de derivacin o relleno de ranura adicionales.
Mdulo de eje integrado Riel de alimentacin elctrica
5. Gire el modulo hacia abajo y alinee los pines de gua en el riel de alimentacin elctrica, con los agujeros de gua situados en la parte posterior del mdulo.
Gire el mdulo hacia abajo para alinearlo con los pines de gua.
Agujeros de gua
Pines de gua
Riel de alimentacin elctrica (vista lateral) en posicin vertical. Mdulo de eje integrado (vista posterior)
Mdulo de eje integrado (vista lateral)
El IAM puede tener dos o tres conectores de riel de alimentacin elctrica y pines de gua, mientras que el AM puede tener uno o dos. Todos los dems mdulos tienen uno.
Publicacin 2094-IN001H-ES-P Julio de 2006
16
Servovaridor multiejes Kinetix 6000
6. Presione suavemente el mdulo contra los conectores del riel de alimentacin elctrica hasta su posicin de montaje final.
Soporte asegurado en la ranura
Riel de alimentacin elctrica
Mdulo de eje integrado
7. Aplique un par de apriete de 2.26 Nm (20 lb-pulg.) al apretar los tornillos de montaje ubicados como se muestra en la figura siguiente.
Vista frontal inferior del IAM o AM de doble anchura (se muestra el AM). Tornillos de montaje
Vista frontal inferior de AM, SM o PRF de anchura normal (se muestra el AM).
IMPORTANTE
Hay dos tornillos de montaje para montar los IAM 2094-AC32-M05, -BC04-M03 y -BC07-M05 (doble anchura) y los AM 2094-AM05, -BM03 y -BM05 (doble anchura).
8.
Si Tiene que montar mdulos adicionales No tiene que montar mdulos adicionales Haga lo siguiente Regrese al paso 1 y complete la instalacin del siguiente mdulo AM, SM o PRF. Vaya a la seccin Monte el mdulo de derivacin externo.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
17
Monte el mdulo de derivacin externo
Si su variador Kinetix 6000 requiere un medio para disipar la energa regenerativa que excede la capacidad del mdulo de derivacin 2094, instale un mdulo de derivacin externo Boletn 1394.
PELIGRO DE QUEMADURA
Para evitar el peligro de choque o quemadura y la ignicin de material inflamable, debe proporcionarse la proteccin adecuada. Estas resistencias pueden alcanzar temperaturas de ms de 350 C (662 F). Al realizar la instalacin observe los cdigos locales.
Siga estos pasos para instalar el mdulo de derivacin externo. 1. Disponga la posicin del mdulo de derivacin en el envolvente. Siga las recomendaciones de diseo de panel indicadas en el documento Kinetix 6000 User Manual, publicacin 2094-UM001. 2. Conecte la resistencia de derivacin al gabinete. Para el montaje se recomienda usar pernos M6 mtricos (1/4 pulg.). Siga las tcnicas de conexin equipotencial de alta frecuencia (HF) recomendadas que se describen en el documento Kinetix 6000 User Manual, publicacin 2094-UM001. 3. Apriete todos los sujetadores de montaje. Para determinar las dimensiones de montaje del mdulo de derivacin, consulte el documento Kinetix Motion Control Selection Guide, publicacin GMC-SG001.
Publicacin 2094-IN001H-ES-P Julio de 2006
18
Servovaridor multiejes Kinetix 6000
Datos de los conectores
Esta seccin proporciona las ubicaciones de los conectores de alimentacin elctrica, retroalimentacin y E/S, as como las descripciones de las seales de los mdulos variadores Kinetix 6000. Si bien el tamao fsico de los mdulos de 460 V es mayor que el de los mdulos de 230 V, la ubicacin de los conectores e indicadores es idntica.
Conectores e indicadores del mdulo de eje integrado
Mdulo de eje integrado, vista superior (se muestra el 2094-AM05-MP5-S)
Abrazadera de blindaje de cable del motor
CTRL 2 CTRL 1
DCDC+ L3 L2 L1
CONT ENCONT EN+
Conector de alimentacin elctrica de control (CPD)
1 2 3 4
1 2 1 2 3 4 5 6
Conector de bus de CC/alimentacin de entrada de CA (IPD)
W V U
1 2 3 4 5 6 7 8 9
Conector de alimentacin elctrica del motor (MP)
Conector de habilitacin de contactor (CED) Conector de desactivacin segura (SO) (presente slo en el 2094-xCxx-Mxx-S)
MBRK MBRK + COM PWR DBRK DBRK +
1 2 3 4 5 6
Conector de motor/freno resistivo (BC)
1 2
RX DPI
TX
BAUD RATE
Conmutadores de potencia ptica y velocidad en baudios SERCOS
Conector de transmisin (Tx) SERCOS Conector DPI Conector de recepcin (Rx) SERCOS
Mdulo de eje integrado, vista frontal (se muestra el 2094-AC05-MP5-x)
SERCOS Conmutador de direccin de nodo Indicador LED de estado de fallo de siete segmentos
Indicador LED de estado del variador Indicador LED de estado de com. Indicador LED de estado del bus
Conector de E/S (IOD)
Conector de retroalimentacin auxiliar (AF) Conector de retroalimentacin del motor (MF)
Tornillo de montaje
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
19
Conectores e indicadores del mdulo de eje
Mdulo de eje, vista superior (se muestra el 2094-AMP5-S)
Abrazadera de blindaje de cable del motor
1 2 3 4
W V U
1 2 3 4 5 6 7 8 9
Conector de alimentacin elctrica del motor (MP)
Conector de desactivacin segura (SO) (presente slo en el 2094-xMxx-S)
MBRK + COM PWR DBRK DBRK +
1 2 3 4 5 6
MBRK -
Conector de motor/freno resistivo (BC)
RX
TX
BAUD RATE
Conmutador de potencia ptica y velocidad en baudios SERCOS Conector de transmisin (Tx) SERCOS Conector de recepcin (Rx) SERCOS
Mdulo de eje, vista frontal (se muestra el 2094-AMP5) Indicador LED de estado de fallo de siete segmentos
Indicador LED de estado del variador Indicador LED de estado de com. Indicador LED de estado del bus
Conector de E/S (IOD)
Conector de retroalimentacin auxiliar (AF) Conector de retroalimentacin del motor (MF)
Tornillo de montaje
Publicacin 2094-IN001H-ES-P Julio de 2006
20
Servovaridor multiejes Kinetix 6000
Conectores del mdulo de eje integrado/mdulo de eje
Designador IOD MF AF CPD Descripcin E/S del usuario (variador) Retroalimentacin del motor Retroalimentacin auxiliar Alimentacin de entrada de control (variador) Voltaje de alimentacin de entrada de CA (variador) 230 V y bus de CC Voltaje de alimentacin de entrada de CA (variador) 460 V y bus de CC Habilitacin de contactor Alimentacin elctrica del motor Freno de motor/dinmico Desactivacin segura Transmisin y recepcin SERCOS DPI Conector Presente en IAM o AM
Conector tipo D de alta densidad de 26 pines IAM/AM Conector tipo D de alta densidad de 15 pines (hembra) Conector tipo D de alta densidad de 15 pines (macho) Conector/cabezal de 2 posiciones Conector/cabezal de 6 posiciones Conector/cabezal de 6 posiciones Conector/cabezal de 2 posiciones Conector/cabezal de 4 posiciones Conector/cabezal de 6 posiciones Conector/cabezal de 9 posiciones Fibra ptica SERCOS (2) DPI IAM/AM IAM/AM IAM IAM IAM IAM IAM/AM IAM/AM IAM/AM IAM/AM IAM
IPD
CED MP BC SO Tx y Rx DPI
Configuracin de pines del conector de desactivacin segura
Cada IAM (2094-xCxx-Mxx-S) y AM (2094-xMxx-S) se enva con el cabezal de enchufe de cableado (9 pines) (2090-XNSS-WP) y el puente de movimiento permitido (2090-XNSS-MA) instalado en el conector de desactivacin segura (SO). Con el puente de movimiento permitido instalado, la funcin de desactivacin segura no se usa. Para obtener informacin sobre el cableado para desactivacin segura, consulte el documento Kinetix Safe-off Feature Safety Reference Manual, publicacin GMC-RM002.
Puente de movimiento permitido (2090-XNSS-MA)
Kinetix 6000 IAM/AM (se muestra el Kinetix 6000 AM)
1 1 2 3 4 5 6 7 8 9
Conector de desactivacin segura (SO)
Puente de movimiento permitido
Cabezal de enchufe de cableado
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
21
Los cabezales indicados en esta tabla extienden las seales del conector de desactivacin segura (SO) para uso en el cableado de configuraciones de desactivacin segura de uno o varios variadores, o para puentear (no usar) la funcin de desactivacin segura. Consulte el documento Kinetix Safe-off Feature Safety Reference Manual, publicacin GMC-RM002, para obtener ms informacin sobre los cabezales de desactivacin segura.
Conector de 9 pines de desactivacin segura (SO) del IAM/AM
Pin del conector de desactivacin segura (SO) 1 2 3 4 5 6 7 8 9 2090-XNSS-WP y 2090-XNSS-MA 2090-XNSS-WP y 2090-XNSM-W Tambin se aplica a estos cabezales de conector SO
Descripcin Un lado del contacto de monitoreo normalmente cerrado del rel 2 El otro lado del contacto de monitoreo normalmente cerrado del rel 2 Un lado del contacto de monitoreo normalmente cerrado del rel 1 El otro lado del contacto de monitoreo normalmente cerrado del rel 1 Bobina del rel de seguridad 2 Retorno para alimentacin de bobina del rel de seguridad (ambos rels) Bobina del rel de seguridad 1 Alimentacin para habilitacin continua de la funcin de seguridad, 500 mA mx. Retorno de la alimentacin usada para habilitacin continua de la funcin de seguridad
Seal FDBK2+ FDBK2 FDBK1+ FDBK1 SAFETY ENABLE2+ SAFETY ENABLE SAFETY ENABLE1+ 24 V+ 24V_COM
IMPORTANTE
Los pines SO-8 y -9 (24 V+) son usados slo por el puente de movimiento permitido 2090-XNSS-MA. Al realizar el cableado al cabezal (de enchufe de cableado) 2090-XNSS-WP, el suministro de 24 V debe venir de una fuente externa.
Publicacin 2094-IN001H-ES-P Julio de 2006
22
Servovaridor multiejes Kinetix 6000
Configuracin de pines del conector de E/S
Conector de 26 pines de E/S (IOD) del IAM/AM
Pin del IOD 1 2 3 4 5 6 7 8 9 10 11 12 13 Descripcin Fuente de alimentacin de 24 VCC de habilitacin de hardware Entrada de habilitacin de hardware Comn Fuente de alimentacin de 24 VCC del conmutador de posicin inicial Entrada del conmutador de posicin inicial Comn Fuente de alimentacin de 24 VCC de sobrecarrera positiva Entrada de interruptor de fin de sobrecarrera positiva Comn Fuente de alimentacin de 24 VCC de sobrecarrera negativa Entrada de interruptor de fin de sobrecarrera negativa Comn Alimentacin de registro de 24 V Seal +24V_PWR ENABLE +24V_COM +24V_PWR HOME +24V_COM +24V_PWR OT+ +24V_COM +24V_PWR OT +24V_COM REG_24V Pin del IOD 14 15 16 17 18 19 20 21 22 23 24 25 26 Descripcin Entrada 1 de registro de alta velocidad Comn para registro Alimentacin de registro de 24 V Entrada 2 de registro de alta velocidad Comn para registro Reservado Reservado Reservado Reservado Salida analgica 0 Comn de salida analgica Salida analgica 1 Comn de salida analgica Seal REG1 REG_COM REG_24V REG2 REG_COM DAC0 DAC_COM DAC1 DAC_COM
IMPORTANTE
Los terminales +24V_PWR y +24V_COM son una fuente de 24 VCC que usted puede usar slo para las entradas listadas arriba.
Orientacin de pines del conector de E/S (IOD) de 26 pines
Conector de E/S de 26 pines del IAM/AM
Pin 26
Pin 18 Pin 9
Pin 19 Pin 10
Pin 1
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
23
Configuracin de pines del conector de retroalimentacin del motor
Stegmann Hiperface (SRS/SRM)
Pin del MF 1 2 3 4 5 6 7 8
(1)
Descripcin Entrada diferencial senoidal+ Entrada diferencial senoidal Entrada diferencial cosenoidal+ Entrada diferencial cosenoidal Canal de datos de Hiperface Comn Alimentacin de encoder (+9 V) Reservado
Seal SINE+ SINE COS+ COS DATA+ ECOMM EPWR_9VM
Pin del MF 9 10 11 12 13 14 15
Descripcin Reservado Canal de datos de Hiperface Interruptor trmico de motor (normalmente cerrado) (1) Reservado Reservado Alimentacin de encoder (+5 V) Reservado
Seal DATA TS EPWR_5VM
No se aplica a menos que el motor tenga proteccin trmica integrada.
TTL o seno/coseno con impulso de ndice y conmutacin Hall
Pin del MF 1 2 3 4 5 6 7 8
(1)
Descripcin Entrada diferencial senoidal+ / AM+ Entrada diferencial senoidal / AM Entrada diferencial cosenoidal+ / BM+ Entrada diferencial cosenoidal / BM Impulso de ndice+ Comn Alimentacin de encoder (+9 V) Conmutacin de efecto Hall unipolar de 5V
Seal AM+ / SINE+ AM / SINE BM+ / COS+ BM / COS IM+ ECOMM EPWR_9VM S3
Pin del MF 9 10 11 12 13 14 15
Descripcin Reservado Impulso de ndice Interruptor trmico de motor (normalmente cerrado) (1)
Seal IM TS
Conmutacin de efecto Hall unipolar de 5 V S1 Conmutacin de efecto Hall unipolar de 5 V S2 Alimentacin de encoder (+5 V) Reservado EPWR_5VM
No se aplica a menos que el motor tenga proteccin trmica integrada.
Publicacin 2094-IN001H-ES-P Julio de 2006
24
Servovaridor multiejes Kinetix 6000
Transmisor del dispositivo de resolucin (relacin de transformacin = 0.25)
Pin del MF 1 2 3 4 5 6 7 8
(1) (2)
Descripcin Entrada diferencial senoidal+ Entrada diferencial senoidal Entrada diferencial cosenoidal+ Entrada diferencial cosenoidal Excitacin de dispositivo de resolucin Comn Alimentacin de encoder (+9 V) Reservado
Seal S2 S4 S1 S3 R1 ECOMM EPWR_9VM
Pin del MF 9 10 11 12 13 14 15
Descripcin Reservado Excitacin de dispositivo de resolucin Interruptor trmico de motor (normalmente cerrado) (1) (2) Reservado Reservado Alimentacin de encoder (+5 V) Reservado
Seal R2 TS EPWR_5VM
No se aplica a menos que el motor tenga proteccin trmica integrada. Cuando use motores 1326AB (basados en dispositivo de resolucin) use el juego de conectores de bajo perfil (2090-K6CK-D15MF) que conecta el interruptor trmico con filtro (pines 16 y 17) al MF-11 y al MF-6.
IMPORTANTE
Para cumplir con los requisitos de CE, la longitud combinada de los cables de alimentacin elctrica de motor en el mismo bus de CC no debe exceder de 240 m (787 pies) con sistemas de 460 V o de 160 m (525 pies) con sistemas de 230 V. Los cables de alimentacin del variador al motor no deben exceder de 90 m (295.5 pies).
Orientacin de pines del conector de retroalimentacin de motor (MF) de 15 pines
Conector de retroalimentacin de motor de 15 pines del IAM/AM
Pin 15 Pin 11 Pin 6
Pin 10 Pin 5 Pin 1
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
25
Configuracin de pines del conector de retroalimentacin auxiliar
Para dispositivos TTL, el conteo de posicin aumentar cuando A preceda a B. Para dispositivos sinusoidales, el conteo de posicin aumentar cuando el coseno preceda al seno.
Stegmann Hiperface (SRS y SRM solamente)
Pin del AF 1 2 3 4 5 6 7 8 Descripcin Entrada diferencial senoidal+ Entrada diferencial senoidal Entrada diferencial cosenoidal+ Entrada diferencial cosenoidal Canal de datos Hiperface Comn Alimentacin de encoder (+9 V) Reservado Seal SINE+ SINE COS+ COS DATA+ ECOM EPWR_9V Pin del AF 9 10 11 12 13 14 15 Descripcin Reservado Canal de datos Hiperface Reservado Reservado Reservado Alimentacin de encoder (+5 V) Reservado Seal DATA EPWR_5V
TTL o seno/coseno con impulso de ndice
Pin del AF 1 2 3 4 5 6 7 8 Descripcin Entrada diferencial senoidal+ / A+ Entrada diferencial senoidal / A Entrada diferencial cosenoidal+ / B+ Entrada diferencial cosenoidal / B Impulso de ndice+ Comn Alimentacin de encoder (+9 V) Reservado Seal A+ / SINE+ A / SINE B+ / COS+ B / COS I+ ECOM EPWR_9V Pin del AF 9 10 11 12 13 14 15 Descripcin Reservado Impulso de ndice Reservado Reservado Reservado Alimentacin de encoder (+5 V) Reservado Seal I EPWR_5V
Orientacin de pines del conector de retroalimentacin auxiliar (AF) de 15 pines
Conector de retroalimentacin auxiliar de 15 pines del IAM/AM
Pin 6 Pin 11 Pin 15
Pin 1 Pin 5 Pin 10
Publicacin 2094-IN001H-ES-P Julio de 2006
26
Servovaridor multiejes Kinetix 6000
Configuracin de pines del conector de entrada del IAM
Conector de alimentacin de control
Pin de CPD 1 2 Descripcin Voltaje de alimentacin de entrada de CA de control Seal CTRL 2 CTRL 1
Conector de alimentacin de entrada y de bus de CC
Pin del IPD 1 2 3 4 5 6 Alimentacin de entrada trifsica Descripcin Una fuente de alimentacin elctrica integral no regulada que consta de una entrada de lnea de CA, rectificador de puente trifsico y condensadores de filtro, Tierra del chasis L3 L2 L1 Seal DC DC+
Conector de habilitacin de contactor
Pin del CED Descripcin 1 2 Contacto seco accionado por rel usado en la cadena de seguridad para un contactor de alimentacin trifsico Seal CONT EN CONT EN+
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
27
Configuracin de pines del conector de alimentacin y freno del motor del IAM y AM
Conector de alimentacin del motor
Pin del MP 4 3 2 1 Alimentacin de motor trifsico Descripcin Tierra del chasis W V U Seal
IMPORTANTE
Para cumplir con los requisitos de CE, la longitud combinada de los cables de alimentacin elctrica de motor en el mismo bus de CC no debe exceder de 240 m (787 pies) con sistemas de 460 V, o de 160 m (525 pies) con sistemas de 230 V. Los cables de alimentacin del variador al motor no deben exceder de 90 m (295.5 pies).
Conector del freno del motor/freno resistivo
Pin del BC 6 5 4 3 2 1 Descripcin Conexiones de freno de motor Comn de freno de motor Alimentacin de entrada de freno de +24 V (proveniente del LIM o suministrada por el cliente) Conexiones del mdulo de freno resistivo (RBM) (desde el RBM y la cadena de seguridad) Seal MBRK MBRK+ COM PWR DBRK DBRK+
Publicacin 2094-IN001H-ES-P Julio de 2006
28
Servovaridor multiejes Kinetix 6000
Conectores e indicadores del mdulo de derivacin
Abrazadera de blindaje de cable del motor
Mdulo de derivacin, vista frontal (2094-BSP2)
COL INT DC+
1 2 3
Conector de resistencia de derivacin externa (RC) Conector del interruptor trmico (TS) externo. Mdulo de derivacin, vista frontal (2094-BSP2)
TS2 TS1
1 2
Indicador LED de fallo de derivacin Indicador LED de fallo por sobretemperatura Indicador LED de estado del bus
Tornillo de montaje
Conectores del mdulo de derivacin
Designador Descripcin RC TS Conector de resistencia de derivacin externa Conector de interruptor trmico Conector Envolvente de conector de tres posiciones Envolvente de conector de dos posiciones
Configuracin de pines del conector de resistencia de derivacin externa (RC) de tres pines
Pin del RC 1 2 3 Descripcin Conexin de resistencia de derivacin externa Conexin de derivacin interna Conexin del colector de derivacin Seal DC+ INT COL
Configuracin de pines del conector del interruptor trmico (TS) externo de dos pines
Pin del TS 1 2 Descripcin Conexiones del interruptor trmico del mdulo de derivacin pasiva externa Seal TS1 TS2
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
29
Conecte la alimentacin elctrica
Para obtener informacin sobre los componentes del variador Kinetix 6000 no incluida en el presente documento, consulte la seccin Recursos adicionales en la pgina 99 o la informacin disponible para dichos productos.
Determine el tipo de alimentacin de entrada
Antes de cablear la alimentacin de entrada a su sistema Kinetix 6000, usted debe determinar el tipo de alimentacin de entrada a la que se est conectando. El IAM est diseado para operar en entornos con y sin conexin a tierra. Cuando use un LIM con su variador Kinetix 6000, la alimentacin de entrada de la lnea de VCA debe provenir de una configuracin con conexin a tierra (consulte la figura siguiente). Cuando no use un LIM con su variador Kinetix 6000, se permiten configuraciones sin conexin a tierra, pero debe establecer el puente para evitar gran acumulacin electrosttica. Para obtener ms informacin, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001.
ATENCIN
Configuraciones de alimentacin con conexin a tierra
La configuracin de alimentacin con conexin a tierra (en estrella) permite conectar la tierra de la alimentacin trifsica a un punto neutro. Este tipo de configuracin de alimentacin sin conexin a tierra es el preferido.
Configuracin de alimentacin con conexin a tierra (secundario en estrella)
Mdulo de eje integrado, vista superior (se muestra 2094-ACxx-Mxx-S)
CTRL 2 CTRL 1
DCDC+ L3 L2 L1
CONT ENCONT EN+
1 2
Secundario del transformador (en estrella)
L3
Transformador
W V U
1 2 3 4 5 6 7 8 9
Entrada de VCA trifsica
L1
RX
TX DPI
1 2 3 4 5 6
BAUD RATE
L2
MBRK MBRK + COM PWR DBRK DBRK +
Tierra de fase Tierra de gabinete con conexin equipotencial Rejilla de tierra o tierra de distribucin de alimentacin elctrica
al perno de tierra del riel de alimentacin elctrica
Publicacin 2094-IN001H-ES-P Julio de 2006
1 2 3 4
1 2 3 4 5 6
1 2
30
Servovaridor multiejes Kinetix 6000
Configuracin de alimentacin con conexin a tierra (fase B) (secundario en tringulo)
Mdulo de eje integrado, vista superior (se muestra 2094-BCxx-Mxx-S)
CTRL 2 CTRL 1
DCDC+ L3 L2 L1
CONT ENCONT EN+
Secundario (en tringulo) del transformador Transformador
W V U
1 2 3 4 5 6 7 8 9
L3
MBRK + COM PWR DBRK DBRK +
L2 L1
RX DPI
TX
1 2 3 4 5 6
BAUD RATE
MBRK -
Tierra de gabinete con conexin equipotencial
al perno de tierra del riel de alimentacin elctrica
Rejilla de tierra o tierra de distribucin de alimentacin elctrica
El mdulo de eje integrado (IAM) tiene un puente de tierra instalado en la fbrica y configurado para distribucin de alimentacin con conexin a tierra.
IMPORTANTE
Si determina que tiene distribucin de alimentacin elctrica con conexin a tierra en su planta, no necesita modificar su IAM.
Publicacin 2094-IN001H-ES-P Julio de 2006
1 2 3 4
1 2 1 2 3 4 5 6
1 2
Servovaridor multiejes Kinetix 6000
31
Configuraciones de alimentacin sin conexin a tierra
Se permiten configuraciones de alimentacin sin conexin a tierra, pero debe conectar en puente una resistencia de 120 k (en el interior del IAM) para evitar gran acumulacin electrosttica. La configuracin de alimentacin sin conexin a tierra (mostrada a continuacin) no proporciona un punto de tierra neutro. El IAM tiene un puente de tierra establecido para distribucin de alimentacin con conexin a tierra (configuracin predeterminada).
IMPORTANTE
Si determina que tiene distribucin de alimentacin sin conexin elctrica en su instalacin, necesita cambiar de posicin el puente predeterminado (configurado para alimentacin con conexin a tierra) a la posicin de alimentacin sin conexin a tierra para evitar gran acumulacin electrosttica dentro del IAM. Para obtener ms informacin, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001.
Configuracin de alimentacin sin conexin a tierra
Mdulo de eje integrado, vista superior (se muestra 2094-BCxx-Mxx-S)
CTRL 2 CTRL 1
DCDC+ L3 L2 L1
CONT ENCONT EN+
Transformador Entrada de VCA trifsica
L3 L2 L1
W V U
1 2 3 4 5 6 7 8 9
COM PWR DBRK DBRK +
RX
TX DPI
1 2 3 4 5 6
BAUD RATE
MBRK MBRK +
Tierra del chasis Tierra de gabinete con conexin equipotencial Rejilla de tierra o tierra de distribucin de alimentacin elctrica
al perno de tierra del riel de alimentacin elctrica
ATENCIN
Los sistemas sin conexin a tierra no emplean la tierra de distribucin de alimentacin como referencia de cada potencial de fase. Esto puede resultar en un potencial desconocido a tierra fsica.
Publicacin 2094-IN001H-ES-P Julio de 2006
1 2 3 4
1 2 1 2 3 4 5 6
1 2
32
Servovaridor multiejes Kinetix 6000
Configuracin de bus comn de CC
Cuando se usa un IAM en una configuracin de bus comn de CC, el IAM se conoce como un IAM lder o un IAM seguidor. El IAM (bus no comn) y el IAM lder tienen conexiones de alimentacin de entrada trifsica idnticas. El IAM lder es responsable de descargar el bus de CC, y de proporcionar a los variadores seguidores de bus comn, precarga de bus de CC, regulacin de bus, deteccin de prdida de fase y deteccin de fallo a tierra. Los IAM seguidores no tienen conexiones de alimentacin de entrada trifsica, pero tienen conexiones de bus de CC provenientes de un IAM lder.
Terminologa y uso del IAM
Este IAM IAM IAM lder IAM seguidor Est cableado Con alimentacin de entrada trifsica. Con alimentacin de entrada trifsica, pero tiene conexiones de bus de CC comn a un IAM seguidor. Sin alimentacin de entrada trifsica, pero tiene conexiones de bus de CC comn provenientes de un IAM lder. Y No est cableado en el modo de bus comn. Est cableado en el modo de bus comn. Est cableado en el modo de bus comn y configurado usando el software RSLogix 5000.
IMPORTANTE
Use el variador Kinetix 6000 con firmware v1.85 y el software RSLogix 5000 v15, para configuraciones de alimentacin elctrica de bus comn.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
33
Requisitos de cableado de alimentacin elctrica
El cable debe ser de cobre con una clasificacin de 75 C (167 F) como mnimo. El ajuste de fase de la alimentacin de CA principal es arbitrario y se requiere una conexin a tierra para una operacin segura y correcta.
IMPORTANTE
El Cdigo elctrico nacional de EE.UU. (NEC) y los cdigos elctricos locales tienen precedencia sobre los valores y mtodos proporcionados.
Requisitos de cableado de alimentacin elctrica del IAM
Nmero de catlogo 2094-AC05-Mxx-S 2094-AC09-Mxx-S 2094-AC16-Mxx-S 2094-AC32-Mxx-S 2094-BC01-Mxx-S 2094-BC02-Mxx-S 2094-BC04-Mxx-S 2094-BC07-Mxx-S Alimentacin de entrada de control 2094-xCxx-Mxx-S Habilitacin de contactor CPD-1 CPD-2 CED-1 CED-2 CTRL 2 CTRL 1 CONT EN CONT EN+ Voltaje de alimentacin de entrada de CA y bus de CC (1) IPD-1 IPD-2 IPD-3 IPD-4 IPD-5 IPD-6 CC CC+ L3 L2 L1 Se conecta a los terminales Pin Seal Calibre de cable recomendado mm2 (AWG) 2.5 (14) 10 (8) 25 (4) 4.0 (12) 10 (8) 25 (4) 2.5 (14) 10 (0.38) 2.5 (14) (2) 0.5 0.6 (4.4 5.3) Longitud a pelar mm (pulg.) 10 (0.38) 16 (0.63) 10 (0.38) 16 (0.63) Valor de par Nm (lb-pulg.) 0.5 0.6 (4.4 5.3) 2.4 3.0 (21.6 26.5) 1.2 1.5 (10.6 13.2) 2.4 3.0 (21.6 26.5) 0.5 0.6 (4.4 5.3)
Mdulo
Descripcin
IAM (230 V)
IAM (460 V)
IAM (230 V o 460 V)
(1) (2)
Las conexiones del bus comn de CC (IAM lder a IAM seguidor) deben mantenerse tan cortas como sea posible. El medidor actual del cableado de habilitacin del contactor depende de la configuracin del sistema. Consulte con el constructor de la mquina, el NEC y los cdigos
ATENCIN
Para evitar lesiones personales y/o dao al equipo, asegrese de que la instalacin cumpla con las especificaciones de tipos de cables, calibres de conductores, proteccin contra circuito derivado y dispositivos de desconexin. El Cdigo elctrico nacional de EE.UU. (NEC) y los cdigos locales establecen disposiciones para instalar de manera segura los equipos elctricos. Para evitar lesiones personales y/o dao al equipo, asegrese de que los conectores de alimentacin del motor se usen para fines de conexin solamente. No los use para encender y apagar la unidad. Para evitar lesiones personales y/o dao al equipo, asegrese de que los cables de alimentacin blindados estn conectados a tierra para evitar la posibilidad de que aparezcan voltajes altos en el blindaje.
Publicacin 2094-IN001H-ES-P Julio de 2006
34
Servovaridor multiejes Kinetix 6000
Requisitos de cableado de alimentacin elctrica del IAM/AM
Se conecta a los terminales Pin 2094-AC05-Mxx-S 2094-AC09-Mxx-S 2094-BC01-Mxx-S 2094-BC02-Mxx-S 2094-AMP5-S, -AM01-S, -AM02-S, -BMP5-S, -BM01-S y -BM02-S 2094-AC16-Mxx-S 2094-AC32-Mxx-S 2094-AM03-S, -AM05-S 2094-BC04-Mxx-S 2094-BC07-Mxx-S 2094-BM03-S, -BM05-S IAM o AM IAM o AM (230 460 V) 2094-xCxx-Mxx-S y 2094-xMxx-S Alimentacin elctrica del freno BC-6 BC-5 BC-4 BC-3 BC-2 BC-1 SO-1 SO-2 SO-3 SO-4 SO-5 SO-6 SO-7 SO-8 SO-9 MBRK MBRK+ COM PWR DBRK DBRK+ FDBK2+ FDBK2 FDBK1+ FDBK1 SAFETY ENABLE2+ SAFETY ENABLE SAFETY ENABLE1+ 24V + 24V_COM Seal Calibre de cable recomendado mm2 (AWG) El cable de alimentacin elctrica del motor depende de la combinacin de motor/variador. 6 (10) mx. Longitud a pelar mm (pulg.)
Mdulo
Nmero de catlogo
Descripcin
Valor de par Nm (lb-pulg.)
10 (0.38)
0.5 0.6 (4.4 5.3)
Alimentacin elctrica del motor
MP-4 MP-3 MP-2 MP-1
W V U
10 (0.38)
1.2 1.5 (10.6 13.2) 2.4 3.0 (21.6 26.5)
25 (4) mx.
16 (0.63)
0.75 (18)
10 (0.38)
0.22 0.25 (1.9 2.2)
IAM o AM (230 460 V) 2094-xCxx-Mxx-S y 2094-xMxx-S
Desactivacin segura
0.75 (18) (cable trenzado con ferrul) 1.5 (16) (cable macizo)
7.0 (0.275)
0.235 (2.0)
Requisitos de cableado de alimentacin del mdulo de derivacin
Se conecta a los terminales Mdulo Descripcin Mdulo de derivacin pasiva externa 1394-SR-xxxx Pin RC-1 RC-2 RC-3 TS-1 TS-2 Seal DC+ INT COL TS1 TS2 0.75 (18) 0.22 0.25 (1.9 2.2) 10 (8) (1) 1.2 1.5 (10.6 13.2) Calibre de cable recomendado mm2 (AWG)
Valor de par Nm (lb-pulg.)
SM (230/460 V) 2094-BSP2
Interruptor trmico
(1)
105 C (221 F), 600 V.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
35
Pautas elctricas
Para obtener informacin detallada y ejemplos especficos sobre todos estos temas, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001. Para obtener las especificaciones y requisitos de cableado de alimentacin elctrica, inclusive tamaos de fusibles recomendados para el LIM (2094-AL09 y -BL02), consulte el documento Line Interface Module Installation Instructions, publicacin 2094-IN005. El Cdigo elctrico nacional de EE.UU. (NEC) y los cdigos elctricos locales tienen precedencia sobre los valores y mtodos proporcionados. La implementacin de estos cdigos es responsabilidad del constructor de la mquina.
ATENCIN
Separe el cableado de alimentacin de entrada y los cables de alimentacin elctrica de motor del cableado de control y los cables de retroalimentacin del motor. Use cable blindado para el cableado de alimentacin elctrica y proporcione una terminacin de abrazadera para 360. Determine el tamao del transformador, si es necesario para la alimentacin de control, al 150% de la clasificacin de alimentacin de salida del IAM. No exceda la tasa de ciclos recomendada en aplicaciones que conectan y desconectan repetidamente la alimentacin de entrada principal. Se requiere un filtro de lnea de CA para cumplir con las especificaciones CE. Monte el filtro en el mismo panel que el variador y tan cerca del mismo como sea posible. Se requiere cablear el rel de habilitacin del contactor (CED). Para evitar lesiones o dao al variador, cablee el rel de habilitacin del contactor en su cadena de control de seguridad de modo que: se desconecte la alimentacin trifsica del variador en caso de presentarse una condicin de fallo con desactivacin. se impida la operacin del variador cuando el riel de alimentacin elctrica no est completamente poblado. se conecte la alimentacin de control al variador antes que la alimentacin trifsica. Consulte en Requisitos de cableado del IAM (sin LIM), pgina 40, los ejemplos de cableado.
ATENCIN
Publicacin 2094-IN001H-ES-P Julio de 2006
36
Servovaridor multiejes Kinetix 6000
Ejemplos de cableado
Nota 1 2 3 4 5
Esta seccin proporciona ejemplos de cableado para ayudarle a cablear el sistema Kinetix 6000. Las notas a continuacin se aplican a los ejemplos de cableado en las pginas siguientes.
7 8 9 10
11
Informacin Para obtener las especificaciones del cableado de alimentacin elctrica, consulte Requisitos de cableado de alimentacin elctrica en la pgina 33. Para obtener informacin sobre tamaos de disyuntor y fusibles de entrada, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001. Para obtener las especificaciones del filtro de lnea de CA, consulte el documento Kinetix Motion Control Selection Guide, publicacin GMC-SG001. Para hacer las conexiones se requiere el bloque de terminales. El IAM 2094-BCxx-Mxx (460 V) requiere un transformador reductor de voltaje para entrada de alimentacin de control monofsica. Suministre alimentacin de control para el IAM 2094-ACxx-Mxx (230 V) proveniente de la alimentacin de entrada trifsica (lnea a lnea). Para poder suministrar alimentacin de control de 230 V de cualquier otra fuente se requiere un transformador de aislamiento. Si se usa, no conecte a tierra ninguna rama de salida del transformador de aislamiento. Los modelos de LIM 2094-ALxxS y -BLxxS pueden alimentar ocho ejes como mximo. Los modelos de LIM 2094-XL75S-Cx pueden alimentar diecisis ejes como mximo. Para sistemas de bus comn con ms de diecisis ejes, se requieren mltiples LIM (o transformadores de alimentacin de control). La bobina del contactor (M1) necesita supresores de sobrevoltaje integrados para operacin de la bobina de CA. Consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001. La entrada de habilitacin del variador debe abrirse cuando se desconecta la alimentacin principal; de lo contrario ocurrir un fallo del variador. Debe esperarse por lo menos 1.0 segundo antes de tratar de habilitar el variador despus de restaurar la alimentacin principal. Para cumplir con los requisitos CE, debe usarse abrazadera de blindaje de cable. No se requiere conexin externa a la tierra. La configuracin predeterminada para el puente es para alimentacin con conexin a tierra en el sitio del usuario. En sitios sin conexin a tierra debe conectarse en puente la resistencia de fuga para evitar gran acumulacin electrosttica. Para obtener ms informacin, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001. Deje el puente entre PR2 y PR3 como se muestra para utilizar la resistencia de precarga interna. Quite el puente cuando se requiera circuito/ precarga externa. Para obtener ms informacin, consulte el documento 8720MC Regenerative Power Supply Installation Manual, publicacin 8720MC-RM001. ATENCIN
12
La implementacin de los circuitos de seguridad y la evaluacin de riesgos es responsabilidad del constructor de la mquina. Consulte los clculos y categoras de rendimiento de seguridad de los estndares internacionales EN 1050 y EN 954. Para obtener ms informacin consulte el documento Understanding the Machinery Directive, publicacin SHB-900. Se requiere cablear el rel de habilitacin del contactor. Para evitar lesiones o dao al variador, cablee el rel de habilitacin del contactor en su cadena de control de seguridad. Consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001, para obtener ms informacin. El calibre de cable mnimo recomendado para cablear el circuito de seguridad al conector de habilitacin del contactor es 1.5 mm2 (16 AWG).
13
ATENCIN
14 15 16 17 18 19 20 21 22
23
El mdulo de eje Kinetix 6000 referenciado es ya sea un mdulo de eje individual (2094-xMxx) o el mismo mdulo de eje que reside dentro de un mdulo de eje integrado (2094-xCxx-Mxx). Para las especificaciones del cable del motor, consulte el documento Kinetix Motion Control Selection Guide, publicacin GMC-SG001. Los colores de los cables son para cables con conductores libres (2090-XXNFxx-Sxx) y pueden variar con respecto al cable de conector premoldeado (2090-UXNFBxx-Sxx). Los cables de retroalimentacin serie Y tienen un cable de tierra que debe doblarse hacia atrs por debajo de la abrazadera del conector de bajo perfil. Slo el encoder MPG-Bxxx utiliza una alimentacin de +5 VCC. Los encoders MPL-B3xx, -B4xx, -B45xx, -B5xx, -B6xx, -B8xx, -B9xx utilizan una alimentacin de +9 VCC. Los encoders MPL-A3xx, -A4xx, -A45xx y MPG-Axxx utilizan una alimentacin de +5 VCC. Slo el encoder MPL-A5xx utiliza una alimentacin de +9 VCC. Los encoders MPL-A15xx, -A2xx, MPF-A3xx, -A4xx, -A45xx y MPS-Axxx utilizan una alimentacin de +5 VCC. Los encoders MPL-B15xx, -B2xx, MPF -A5xx, -Bxxx y MPS-Bxxx utilizan +9 VCC. Los cables del freno en los motores MPF-A/B5xx estn etiquetados con el signo ms (+) y menos (). Todos los dems cables del freno del motor serie MP estn etiquetados F y G. Consulte Especificaciones de fusibles de entrada de derivacin activa 1336 para obtener las especificaciones de los fusibles de entrada. Los requisitos de corriente son slo para aplicaciones de derivacin maestras solamente. Para aplicaciones maestro/esclavo, usted debe multiplicar el requisito de corriente por el nmero de unidades de derivacin. Consulte Especificaciones de rel de fallo de derivacin activa 1336 para obtener las especificaciones de los rels de fallo. Este contacto normalmente cerrado (compatible con TTL) se cierra cuando se aplican 115 VCA y se abre cuando ocurre un fallo de derivacin o una prdida de alimentacin elctrica.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
37
Ejemplos de cableado de alimentacin elctrica
Ejemplo de cableado de un solo IAM con LIM (2094-AL09 o -BL02)
Mdulo de eje integrado Kinetix 6000 2094-ACxx-Mxx o -BCxx-Mxx
Bus de tierra de gabinete con conexin equipotencial* Perno de tierra del riel de alimentacin elctrica Abrazadera de blindaje de cable Nota 9
MDULO DE INTERFACE DE LNEA 2094-AL09 -BL02
Salida monofsica (CPL) de 195...264 VCA RMS Notas 1
4
Conector de alimentacin elctrica del motor (MP)
L2 L1
1 2
1 2 1 2 3
CTRL 2 CTRL 1 DCDC+ L3 L2 L1
Conector de alimentacin elctrica de control (CPD)
W V U
3 2 1
Conexiones de alimentacin de motor trifsico Nota 15
Entrada trifsica de LNEA VCA (IPL) 195...264 VCA RMS 324...528 VCA RMS Nota 1 Fusibles de entrada*
L3 L2 L1
Tierra Salida de CARGA trifsica de VCA (OPL) 195...264 VCA RMS o 324...528 VCA RMS Nota 1
L3' L2' L1'
4 5 6
Conector de entrada trifsica y bus de CC (IPD)
MBRK_PWR
Conector de salida de 24 VCC (PSL)
1 2 3 4 MBRK MBRK +
Conector de motor/freno resistivo (BC)
MBRK_COM MBRK_PWR MBRK_COM
6 5 4 3 2 1
BRBR+
Conexiones del freno del motor
COM PWR DBRK -
IO_PWR
Conector de E/S (IOL) Nota 12, 13
24-26
PARO*
BRBR+
DBRK +
Conexiones del freno resistivo
COIL_A1 IO_COM COIL_A2
13 20-22 4 1 2 CONT ENCONT EN+
Conector de habilitacin de contactor (CED) Nota 13
* Indica componente suministrado por el usuario
Publicacin 2094-IN001H-ES-P Julio de 2006
38
Servovaridor multiejes Kinetix 6000
Ejemplo de cableado de mltiples IAM con LIM (2094-ALxxS, -BLxxS o -XL75S)
Mdulo de eje integrado Kinetix 6000 2094-ACxx-Mxx o -BCxx-Mxx (IAM_1)
Bus de tierra de gabinete con conexin equipotencial* Perno de tierra del riel de alimentacin elctrica Abrazadera de blindaje de cable Nota 9
Mdulo de interface de lnea 2094-ALxxS, -BLxxS o -XL75S-Cx
Salida de alimentacin CTRL 2 1 monofsica de control (CPL) 2 195...264 VCA RMS CTRL 1 Nota 1 Nota 4
4
Conector de alimentacin elctrica del motor (MP)
1 2
CTRL 2 CTRL 1
Conector de alimentacin elctrica de control (CPD)
W V U
3 2 1
Conexiones de alimentacin de motor trifsico Nota 15
To conector CPD, Al CPD connector, IAM_2 IAM_2 Nota 6
1 2 3
DCDC+ L3 L2 L1
1
Entrada de LNEA trifsica de VCA (IPL) 195...264 VCA RMS o 324...528 VCA RMS Nota 1
2 3 4
L3 L2 L1
Salida de CARGA trifsica de VCA (OPL) 195...264 VCA RMS o 324...528 VCA RMS Nota 1
1 L3' L2' L1' 2 3 4
Nota 4 Filtro de lnea de CA trifsico Nota 3
4 5 6
Conector de entrada trifsica y bus de CC (IPD)
To conector IPD, Al IPD connector, IAM_2
Entrada de alimentacin auxiliar monofsica (APL) 93...121 VCA RMS o 196...253 VCA RMS (este conector est presente slo en el 2094-XL75S-Cx) Nota 1
1 2
L1 L2/N IO_PWR2 IO_COM2
Salida de 24 VCC (P1L)
1 2 3 4 5 6
Conexiones del freno del motor
To conector BC, IAM_2 Al BC connector, IAM_2
IO_PWR2 IO_COM2 IO_PWR2 IO_COM2
MBRK MBRK +
Conector de motor/freno resistivo (BC)
6 5 4 3 2 1
BRBR+
COM PWR DBRK DBRK +
IO_PWR1
Conector de E/S (IOL) Nota 12, 13
1, 3, 5
PARO*
BRBR+
COIL_E1 IO_COM1 COIL_E2
7 2, 4, 6 8 1 2 CONT ENCONT EN+
Conector de habilitacin de contactor (CED) Nota 13
Conexiones del freno resistivo
* Indica componente suministrado por el usuario
To conector CED, IAM_2 Al CED connector, IAM_2
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
39
Mdulo de eje integrado Kinetix 6000 2094-ACxx-Mxx o -BCxx-Mxx (IAM_2)
Perno de tierra del riel de alimentacin Abrazadera de elctrica blindaje de cable Nota 9
Bus de tierra de gabinete con conexin equipotencial*
4
Conector de alimentacin elctrica del motor (MP)
1 From el conector CPL, LIM Desde CPL connector, LIM 2
CTRL 2 CTRL 1
Conector de alimentacin elctrica de control (CPD)
W V U
3 2 1
Conexiones de alimentacin de motor trifsico Nota 15
1 2 3
Desde OPL connector, LIM From el conector OPL, LIM Filtro de lnea de CA trifsico Nota 3
DCDC+ L3 L2 L1
4 5 6
Conector de entrada trifsica y bus de CC (IPD)
MBRK MBRK +
Conector de motor/freno resistivo (BC)
6 5 4 3 2 1
BRBR+
Conexiones del freno del motor
COM PWR DBRK DBRK +
From P1L conector P1L, LIM Desde el connector, LIM BRBR+
Conexiones del freno resistivo
From IOL connector, LIM Desde el conector IOL, LIM, and CED connector, IAM_1 y el conector CED, IAM_1
1 2
CONT ENCONT EN+
Conector de habilitacin de contactor (CED) Nota 13
Publicacin 2094-IN001H-ES-P Julio de 2006
40
Servovaridor multiejes Kinetix 6000
La configuracin en esta pgina no incluye un LIM. Usted debe suministrar los componentes de alimentacin de entrada. Los filtros de lnea monofsica y trifsica se cablean en la rama descendente del fusible y el contactor M1. Se requiere cablear el rel de habilitacin del contactor. Para evitar lesiones o dao al variador, cablee el rel de habilitacin del contactor en su cadena de control de seguridad. Para obtener ms informacin, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001.
Requisitos de cableado del IAM (sin LIM)
Mdulo de eje integrado Kinetix 6000 2094-ACxx-Mxx o -BCxx-Mxx
Bus de tierra de gabinete con conexin equipotencial* Chasis Filtro de lnea de CA monofsico Nota 3 Fusibles de entrada* Transformador de aislamiento* Nota 5 Perno de tierra del riel de alimentacin elctrica
ATENCIN
1 2
Entrada monofsica 95...264 VCA RMS Notas 1, 2
CTRL 2 CTRL 1
Nota 9 Conector de alimentacin elctrica de control (CPD) Abrazadera de blindaje de cable
4
Conector de alimentacin elctrica del motor (MP)
W V U
3 2 1
1 2
Nota 4 Entrada trifsica 195...264 VCA RMS o 324...528 VCA RMS Notas 1, 2 Fusibles internos* M1* Notas 7, 8 Filtro de lnea de CA trifsico Nota 3
DCDC+ L3 L2 L1
Conector de motor/freno resistivo (BC) Conector de entrada trifsica y bus de CC (IPD)
Conexiones de alimentacin de motor trifsico Nota 15
3 4 5 6
MBRK MBRK + COM PWR DBRK -
6 5 4 3 2 1
BRBR+
Conexiones del freno del motor 24 VCC suministrados por el usuario (1.2 A mximo) Conexiones del freno resistivo
BRBR+
Notas 7, 13 PARO* CR1* M1* CR1* CR1* Consulte el mensaje de Atencin (Nota 12). ARRANQUE*
CONT EN2 CONT EN+
DBRK +
Conector de habilitacin de contactor (CED) Nota 13
24 VCA/CC o 120 VCA 50/60 Hz
Puente de tierra Nota 10 * Indica componente suministrado por el usuario
Publicacin 2094-IN001H-ES-P Julio de 2006
Bus de tierra de gabinete con conexin equipotencial* Perno de tierra del riel de alimentacin elctrica Nota 9 Abrazadera de blindaje de cable
IAM seguidor de bus comn Kinetix 6000 2094-ACxx-Mxx o -BCxx-Mxx
Bus de tierra de gabinete con conexin equipotencial* Nota 9
IAM lder de bus comn Kinetix 6000 2094-ACxx-Mxx o -BCxx-Mxx
1 2 4 3 2 1 1 2 3 4 4 5 6 L1 L2 MBRK MBRK + COM PWR DBRK DBRK + 1 2
Conector de motor/freno resistivo (BC)
Perno de tierra del riel de alimentacin elctrica Abrazadera de blindaje de cable
CTRL 2 CTRL 1 DCDC+ L3
Conector de entrada trifsica y bus de CC (IPD)
Conector de alimentacin elctrica de control (CPD)
1
Conector de alimentacin elctrica de control (CPD)
Conector de alimentacin elctrica del motor (MP)
Entrada monofsica 95...264 VCA RMS Notas 1, 2
2 3 2 1 N.C. N.C. N.C.
CTRL 2 CTRL 1
W V U
Conexiones de alimentacin de motor trifsico Nota 15
DC-
6 5 4 3 2 1
DC+
Conector de alimentacin elctrica del motor (MP)
W V U
Conexiones de alimentacin de motor trifsico Nota 15
4 6 5 4 3 2 1 CONT ENCONT EN+
5 MBRK MBRK + COM PWR DBRK DBRK +
L3
Conector de entrada trifsica y bus de CC (IPD)
Entrada trifsica proveniente del LIM o contactor de alimentacin de entrada (M1) 195...264 VCA RMS o 324...528 VCA RMS Notas 1, 2, 7, 8
L2
L1
Conector de motor/freno resistivo (BC)
Conector de habilitacin de contactor (CED) Nota 13
1
Conector de habilitacin de contactor (CED) Nota 13
Ejemplos de cableado de bus comn de CC
Ejemplo de cableado de IAM lder con un IAM seguidor
CONT ENCONT EN+
* Indica componente suministrado por el usuario
Servovaridor multiejes Kinetix 6000
Cablee los terminales de habilitacin de contactor de los IAM lder y seguidor en serie con la cadena de control de seguridad o las E/S del LIM.
41
Publicacin 2094-IN001H-ES-P Julio de 2006
42
Servovaridor multiejes Kinetix 6000
Ejemplo de cableado de IAM lder con varios IAM seguidores
A las conexiones del bus de CC del seguidor
A las conexiones de alimentacin de control del seguidor
Bus de tierra de gabinete con conexin equipotencial*
IAM lder de bus comn Kinetix 6000 2094-ACxx-Mxx o -BCxx-Mxx
Perno de tierra del riel de alimentacin elctrica Abrazadera de blindaje de cable
Nota 9
Entrada monofsica 95...264 VCA RMS Notas 1, 2
1 2
Nota 4
CTRL 2 CTRL 1 DCDC+ L3 L2 L1
Conector de alimentacin elctrica de control (CPD) Conector de alimentacin elctrica del motor (MP)
1 2 3
Entrada trifsica proveniente del LIM o contactor de alimentacin de entrada (M1) 195...264 VCA RMS o 324...528 VCA RMS Notas 1, 2, 7, 8
4 5 6
Conector de entrada trifsica y bus de CC (IPD)
W V U
3 2 1
Conexiones de alimentacin de motor trifsico Nota 15
MBRK MBRK +
6 5 4 3 2 1
Conector de motor/freno resistivo (BC)
COM PWR DBRK DBRK +
1 2
CONT ENCONT EN+
Conector de habilitacin de contactor (CED) Nota 13
A las conexiones del circuito de control del seguidor Cablee los terminales de habilitacin de contactor de los IAM lder y seguidor en serie con la cadena de control de seguridad o las E/S del LIM.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
43
Bus de tierra de gabinete con conexin equipotencial*
IAM seguidor de bus comn Kinetix 6000 2094-ACxx-Mxx o -BCxx-Mxx
Perno de tierra del riel de alimentacin elctrica Abrazadera de blindaje de cable
Nota 9
Nota 4 Desde las conexiones de alimentacin de control del lder Nota 4 Desde las conexiones del bus de CC del lder Fusible del bus de CC* Nota 2
1 2 1 2 3 N.C. N.C. N.C. 4 5 6
CTRL 2 CTRL 1 DCDC+ L3 L2 L1
Conector de alimentacin elctrica de control (CPD) Conector de alimentacin elctrica del motor (MP)
Conector de entrada trifsica y bus de CC (IPD)
W V U
3 2 1
Conexiones de alimentacin de motor trifsico Nota 15
MBRK MBRK +
6 5 4 3 2 1
Conector de motor/freno resistivo (BC)
COM PWR DBRK DBRK +
1 2
CONT ENCONT EN+
Conector de habilitacin de contactor (CED) Nota 13
Bus de tierra de gabinete con conexin equipotencial*
IAM seguidor de bus comn Kinetix 6000 2094-ACxx-Mxx o -BCxx-Mxx
Perno de tierra del riel de alimentacin elctrica Abrazadera de blindaje de cable
Nota 9
1 2 1 2 3
Fusible del bus de CC* Nota 2
CTRL 2 CTRL 1 DCDC+ L3 L2 L1
Conector de alimentacin elctrica de control (CPD) Conector de alimentacin elctrica del motor (MP)
N.C. N.C. N.C.
4 5 6
Conector de entrada trifsica y bus de CC (IPD)
W V U
3 2 1
Conexiones de alimentacin de motor trifsico Nota 15
MBRK MBRK +
6 5 4 3 2 1
Conector de motor/freno resistivo (BC) Desde las conexiones del circuito de control del lder
COM PWR DBRK DBRK +
1 2
CONT ENCONT EN+
Conector de habilitacin de contactor (CED) Nota 13
* Indica componente suministrado por el usuario
Publicacin 2094-IN001H-ES-P Julio de 2006
44
Entrada trifsica (+10/15%) 380 VCA RMS, 50 Hz o 460 VCA RMS, 60 Hz Notas 1, 2
Fusibles de entrada* Bus de tierra de gabinete con conexin equipotencial* Perno de tierra del riel de Nota 9 alimentacin elctrica Abrazadera de blindaje de cable Bus de tierra de gabinete con conexin equipotencial*
IAM seguidor de bus comn Kinetix 6000 2094-BCxx-Mxx
Filtro de lnea de CA trifsico Nota 3
Filtro de armnicas
R G 2 1 2 3 4 5 6 L1 L2 L3 DC+
Conector de entrada trifsica y bus de CC (IPD)
S TB1 4 3 2 1 L1 TB1 DCDC+ P N DCConector de alimentacin elctrica del motor (MP)
T R S T L3
M1* Nota 7 Reactores de lnea
E/N
Entrada monofsica 95...264 VCA RMS Notas 1, 2
Fuente de alimentacin elctrica regenerativa 8720MC 8720MC-RPSxxx
1 CTRL 2 CTRL 1
Conector de alimentacin elctrica de control (CPD)
Servovaridor multiejes Kinetix 6000
Publicacin 2094-IN001H-ES-P Julio de 2006
L2
W V U
Conexiones de alimentacin de motor trifsico Nota 15
Varistor
Fusibles del ventilador del motor*
N.C. N.C. N.C. TB3 1 2
E/S de control de movimiento
Al ventilador del motor
R1 S1 L2 AUX L3 AUX PR1
Nota 11
TB2 L1 AUX 3 +24V_COM
COM RDY
+24V_PWR ENABLE
Conector de E/S (IOD)
T1 1 2
PR2 PR3 MC1 MC2 +24V dc PWR
CONT ENCONT EN+
Conector de habilitacin de contactor (CED) Nota 13
* Indica componente suministrado por el usuario
MC
MBRK MBRK + COM
Conector de motor/ freno resistivo (BC) Nota 13 Arranque*
6 5 4 PWR DBRK DBRK + 3 2 1
120 VCA suministra dos por el cliente
Paro*
CR1*
Consulte el mensaje de Atencin (Nota 12). CR1*
Ejemplo de cableado del variador lder 8720MC-RPS con un IAM seguidor
IMPORTANTE
Use un circuito de botn pulsador (en lugar de un conmutador SPST) en serie con la cadena de habilitacin del contactor (entre el 8720MC-RPS y el variador Kinetix 6000) para permitir que un fallo del variador desconecte la alimentacin del bus de CC y para evitar que el variador conecte la alimentacin del bus de CC sin que usted lo apruebe, despus de borrar un fallo del variador.
Servovaridor multiejes Kinetix 6000
45
Ejemplos de cableado del mdulo de derivacin
Mdulo de derivacin cableado para operacin interna (configuracin predeterminada)
Mdulo de derivacin Kinetix 6000 2094-BSP2 Conector de resistencia de derivacin externa (RC) Conector de interruptor trmico (TS) externo.
COL INT DC+ TS2 TS1
3 2 1 2 1
Ejemplo de cableado del mdulo de derivacin con derivacin pasiva externa
Mdulo de derivacin Kinetix 6000 2094-BSP2 Mdulo de derivacin pasiva externa
Conector de resistencia de derivacin externa (RC)
COL INT DC+
3 2 1
COL DC+
Resistencia
Conector de interruptor trmico (TS) externo.
TS2 TS1
2 1
Interruptor trmico
Consulte en el documento Kinetix Motion Control Selection Guide, publicacin GMC-SG001, la lista de nmeros de catlogo de los mdulos de derivacin externa disponibles para el variador Kinetix 6000
IMPORTANTE
Slo las derivaciones pasivas con un interruptor trmico se cablean al conector TS del mdulo de derivacin Kinetix 6000. Si su derivacin pasiva externa no tiene un interruptor trmico, deje el puente (configuracin predeterminada) en su lugar en el conector TS.
Publicacin 2094-IN001H-ES-P Julio de 2006
46
Servovaridor multiejes Kinetix 6000
Consulte en el documento Kinetix Motion Control Selection Guide, publicacin GMC-SG001, la lista de nmeros de catlogo de los mdulos de derivacin activa externa disponibles para los variadores Kinetix 6000
Ejemplo de cableado del IAM con una derivacin activa externa
Mdulo de eje integrado Kinetix 6000 2094-xCxx-Mxx Mdulo de derivacin activa externa (1336-MOD-Kxxxx)
1 2 3 4
Conexiones de bus de CC
(+) Slave In () Slave In () Master Out (+) Master Out () DC Bus (+) DC Bus TB1
DCDC+ L3 L2 L1
1 2 3 4 5 6
Fusibles de entrada*
5 6 1 2 3 4
Conexiones de entrada trifsica (IPD)
Entrada monofsica 115 VCA RMS 50/60 Hz
TB3
Rel de fallo Nota 23
Tornillo de tierra del 1336 maestro
Conector de habilitacin de contactor (CED)
Nota 13
1 CONT EN2 CONT EN+
Consulte el mensaje de Atencin (Nota 12). CR1* CR1* M1* CR1* 24 VCA/CC o 120 VCA 50/60 Hz
* Indica componente suministrado por el usuario
ARRANQUE*
PARO* Notas 7, 13
Especificaciones de fusibles de entrada de derivacin activa 1336
Mdulo de derivacin activa 1336-Kx005 Kx010 1336-KB050 Descripcin Requisitos de corriente de entrada para alimentar la lgica para operacin de contacto de fallo. Requisitos de corriente de entrada para alimentar el ventilador y la lgica para operacin de contacto de fallo. Requisitos de corriente de entrada 0.05 A 0.65 A
Especificaciones de rel de fallo de derivacin activa 1336
Parmetro On State Current On State Resistance Off State Voltage Descripcin Flujo de corriente cuando el contacto est cerrado Resistencia de contactos (mx.) Voltaje a travs de los contactos cuando el rel est abierto 120 VCA 0.6 A 50 m 120 VCA 30 VCA 2.0 A 50 m 30 VCA
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
47
Ejemplo de cableado del IAM con varias derivaciones activas externas
Mdulo de eje integrado Kinetix 6000 2094-xCxx-Mxx Mdulo de derivacin activa externa (1336-MOD-Kxxxx)
(+) Slave In () Slave In () Master Out
Conexiones de bus de CC
1 2 3 4
DCDC+
1 2 3
Nota 4
(+) Master Out 5 6 () DC Bus (+) DC Bus
TB1
Conexiones de entrada trifsica (IPD)
L3 L2 L1
4 5 6
1 2 3 4
TB3
Rel de fallo Nota 23 Tornillo de tierra del chasis de derivacin 1336 maestro
Conector de habilitacin de contactor (CED) Nota 13
CONT ENCONT EN+
1 2
Mdulo de derivacin activa externa (1336-MOD-Kxxxx)
(+) Slave In 1 2 3 4 () Slave In () Master Out (+) Master Out 5
Notas 7, 13 24 VCA/CC o 120 VCA 50/60 Hz PARO* ARRANQUE* CR1* M1* CR1* CR1* Consulte el mensaje de Atencin (Nota 12). Nota 4
() DC Bus (+) DC Bus
6 1 2 3 4
TB1
TB3
Rel de fallo Nota 23 Tornillo de tierra del chasis de derivacin 1336 esclavo
Mdulo de derivacin activa externa (1336-MOD-Kxxxx)
(+) Slave In () Slave In () Master Out (+) Master Out 5 6 () DC Bus (+) DC Bus 1 2 3 4
TB1
Entrada monofsica 115 VCA RMS 50/60 Hz Fusibles de entrada* Nota 22 * Indica componente suministrado por el usuario Nota 4
1 2 3 4
TB3
Rel de fallo Nota 23 Tornillo de tierra del chasis de derivacin 1336 esclavo
Publicacin 2094-IN001H-ES-P Julio de 2006
48
Servovaridor multiejes Kinetix 6000
Ejemplos de mdulo de eje/cableado del motor
Ejemplo de cableado del AM (460 V) con motores serie MP (MPL-B y MPG-B)
Kinetix 6000 IAM (inversor) o AM
Nota 14
0 1 Nota 9 2 Conector de 3 alimentacin elctrica W 4 del motor (MP) V 5 U 6 Conector de 7 retroalimentacin del 8 motor (MF) 9 10 Conector de motor/ 11 freno resistivo (BC) 12 13 MBRK 14 MBRK + 15 COM PWR DBRK DBRK +
Abrazadera de blindaje de cable
Servomotores MPL-B3xx, -B4xx, -B45xx, -B5xx, -B6xx, -B8xx, -B9xx y MPG-B (460 V) con retroalimentacin de alta resolucin
Conector de retroalimentacin del motor (MF) (IAM/AM)
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN GRAY WHT/GRAY ORANGE WHT/ORANGE BLUE
4 3 2 1
Green/Yellow 1/Blue 2/Black 3/Brown
Cable de alimentacin del motor 2090-XXNPMP-xxSxx Nota 15
D C B A W V U GND Alimentacin de motor trifsico
A B C D E F K L N R S
SIN+ SINCOS+ COSDATA+ DATA+5VDC ECOM +9VDC TS+ TSCOM
1 2 3 4 5 10 14 6 7 11
Retroalimentacin del motor
Cable de freno 2090-UXNBMP-18Sxx Nota 15
6 5 4 3 2 1 BRBR+
Black White
C A
BRBR+
Freno del motor Termostato
24 VCC suministrados por el usuario (1.2 A mx.) Conexiones del freno resistivo
Consulte en la ilustracin del conector de bajo perfil (esquina inferior izquierda) la tcnica correcta de conexin a tierra. Cable de retroalimentacin 2090-XXNFMP-Sxx (conductor libre) Notas 15, 16, 18
Servomotores MPL-B3xx, -B4xx, -B45xx, (460 V) con retroalimentacin de dispositivo de resolucin
D
Tcnica de conexin a tierra para blindaje de cable de retroalimentacin Conector de bajo perfil (se muestra el 2090-K6CK-D15M)
Conector de retroalimentacin del motor (MF) (IAM/AM)
BLACK WHT/BLACK RED WHT/RED YELLOW WHT/YELLOW BLUE WHT/BLUE
C B A
W V U
GND
Alimentacin de motor trifsico
A B C D
S2 S4 S1 S3 R1 R2 TS+ TS-
1 2 3 4 5 10 11 6
Retroalimentacin del motor G H
Abrazadera Blindaje expuesto fijado debajo de la abrazadera. Tornillos de abrazadera (2) Voltee la abrazadera para asegurar los cables pequeos.
R
Termostato
S C A BRBR+
Freno del motor
Consulte en la ilustracin del conector de bajo perfil (esquina inferior izquierda) la tcnica correcta de conexin a tierra. Cable de retroalimentacin 2090-CDNFDMP-Sxx (conductor libre) Notas 15, 16,
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
49
Ejemplo de cableado del AM (230 V) con motores serie MP (MPL-A y MPG-A)
Kinetix 6000 IAM (inversor) o AM
Nota 14
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Abrazadera de blindaje de cable
Nota 9
Servomotores MPL-A3xx, -A4xx, -A45xx, -A5xx y MPG-Axxx (230 V) con retroalimentacin de alta resolucin
Conector de retroalimentacin del motor (MF) (IAM/AM)
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN GRAY WHT/GRAY ORANGE WHT/ORANGE BLUE
Conector de alimentacin elctrica del motor (MP) Conector de retroalimentacin del motor (MF)
W V U
4 3 2 1
Green/Yellow 1/Blue 2/Black 3/Brown
Cable de alimentacin del motor 2090-XXNPMP-xxSxx Nota 15
D C B A W V GND
A B C D E F K L N R S
Alimentacin de motor U trifsico Retroalimentacin del motor
SIN+ SINCOS+ COSDATA+ DATA+5VDC ECOM +9VDC TS+ TSCOM
1 2 3 4 5 10 14 6 7 11
Conector de motor/ freno resistivo (BC)
Cable de freno 2090-UXNBMP-18Sxx Nota 15
MBRK MBRK + COM PWR DBRK DBRK +
6 5 4 3 2 1 BRBR+
Black White
C A
BRBR+
Freno del motor Termostato
24 VCC suministrados por el usuario (1.2 A mx.)
Consulte en la ilustracin del conector de bajo perfil (esquina inferior izquierda) la tcnica correcta de conexin a tierra. Cable de retroalimentacin 2090-XXNFMP-Sxx (conductor libre) Notas 15, 16, 19
Conexiones del freno resistivo
Servomotores MPL-A3xx, -A4xx, -A45xx y -A5xx (230 V) con retroalimentacin incremental
Conector de retroalimentacin del motor (MF) (IAM/AM)
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN GRAY WHT/GRAY ORANGE WHT/ORANGE BLUE WHT/BLUE YELLOW WHT/YELLOW
D
Tcnica de conexin a tierra para blindaje de cable de retroalimentacin Conector de bajo perfil (se muestra el 2090-K6CK-D15M)
C B A
W V
GND
Alimentacin de motor trifsico
A B
Abrazadera Blindaje expuesto fijado debajo de la abrazadera. Tornillos de abrazadera (2) Voltee la abrazadera para asegurar los cables pequeos.
C D U E F Retroalimentacin del motor K L N R
Termostato
AM+ AMBM+ BMIM+ IM+5VDC ECOM TS+ TSS1 S2 S3 COM
1 2 3 4 5 10 14 6 7 11
C A
BRBR+
Freno del motor
S T U V P
12 13 8
Consulte en la ilustracin del conector de bajo perfil (esquina inferior izquierda) la tcnica correcta de conexin a tierra. 2090-XXNFMP-Sxx (conductor libre) Notas 15, 16
Publicacin 2094-IN001H-ES-P Julio de 2006
50
Servovaridor multiejes Kinetix 6000
Ejemplo de cableado del AM con motores serie MP (MPL-A/B, MPF-A/B y MPS-A/B)
Kinetix 6000 IAM (inversor) o AM
Nota 14
Servomotores MPL-A/B15xx y -A/ B2xx, MPF-A/Bxxx y MPS-A/Bxxx con retroalimentacin de alta resolucin
Shield
Abrazadera de blindaje de 0 cable 1 Nota 9 2 3 Conector de W 4 alimentacin elctrica V 5 del motor (MP) U 6 7 Conector de 8 retroalimentacin del motor 9 (MF) 10 Conector de motor/ 11 freno resistivo (BC) 12 13 MBRK 14 MBRK + 15 COM
Conector de retroalimentacin del motor (MF) (IAM/AM)
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN GRAY WHT/GRAY ORANGE WHT/ORANGE BLUE
4 3 2 1
Green/Yellow Blue Black Brown
Cable de alimentacin del motor 2090-XXNPMF-xxSxx Nota 15
D/ C/W B/V A/U W GND V Alimentacin de U motor trifsico
Retroalimentacin del motor
1 2 3 4 5 6 9 10 11 13 14
Termostato
SIN+ SINCOS+ COSDATA+ DATA+5VDC ECOM +9VDC TS+ TSCOM
1 2 3 4 5 10 14 6 7 11
6 5 4 3 2 1 BRBR+
Black White
G/F/+
BRBR+
Freno del motor
Nota 21
12
PWR DBRK DBRK +
24 VCC suministrados por el usuario (1.2 A mx.)
Consulte en la ilustracin del conector de bajo perfil (esquina inferior izquierda) la tcnica correcta de conexin a tierra. Cable de retroalimentacin 2090-XXNFMF-Sxx (conductor libre) Notas 15, 16, 20
Conexiones del freno resistivo
Servomotores MPL-A/B15xx y -A/ B2xx con retroalimentacin incremental
Conector de retroalimentacin del motor (MF) (IAM/AM)
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN GRAY WHT/GRAY ORANGE WHT/ORANGE BLUE WHT/BLUE YELLOW WHT/YELLOW
Tcnica de conexin a tierra para blindaje de cable de retroalimentacin
D/
Conector de bajo perfil (se muestra el 2090-K6CK-D15M)
1 2 W GND V Alimentacin de U motor trifsico
Retroalimentacin del motor
C/W B/V A/U
3 4 5 6 9 10 11 13 14 15 16 17 12
AM+ AMBM+ BMIM+ IM+5VDC ECOM TS+ TSS1 S2 S3 COM
1 2 3 4 5 10 14 6 11
Abrazadera Blindaje expuesto fijado debajo de la abrazadera. Tornillos de abrazadera (2) Voltee la abrazadera para asegurar los cables pequeos.
Termostato
G/F/+
BRBR+
Freno del motor
Nota 21
12 13 8
Consulte en la ilustracin del conector de bajo perfil (esquina inferior izquierda) la tcnica correcta de conexin a tierra. Cable de retroalimentacin 2090-XXNFMF-Sxx (conductor libre) Notas 15, 16
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
51
Ejemplo de cableado del AM (230 V) con motores serie TL
Kinetix 6000 IAM (inversor) o AM
Nota 14
Servomotores serie TL (230 V) con retroalimentacin incremental Conector de retroalimentacin del motor (MF) (IAM/AM)
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Abrazadera de blindaje de cable
Nota 9
Conector de alimentacin elctrica del motor (MP) Conector de retroalimentacin del motor (MF)
W V U
4 3 2 1
Green/Yellow Blue Black Brown
Cable de alimentacin elctrica del motor 2090-XXNPT-16Sxx Nota 15
4 3 2 1 W V GND
1 2 3 4 5 10 7 8 6 11 15 9
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN GRAY WHT/GRAY BLUE WHT/BLUE YELLOW WHT/YELLOW GREEN
Alimentacin de U motor trifsico
AM+ AMBM+ BMIM+ IM+5VDC ECOM S1 S2 S3 SHIELD
1 2 3 4 5 10 14 6 12 13 8
Retroalimentacin del motor
Cable de freno del motor 2090-DANBT-18Sxx Nota 15
Conector de motor/ freno resistivo (BC)
MBRK MBRK + COM PWR DBRK DBRK +
6 5 4 3 2 1 BRBR+
Black White
2 1
BRBR+
Freno del motor
24 VCC suministrados por el usuario (1.2 A mx.) Conexiones del freno resistivo
Cable de retroalimentacin 2090-XXNFT-Sxx con conector premoldeado Nota 15
Publicacin 2094-IN001H-ES-P Julio de 2006
52
Servovaridor multiejes Kinetix 6000
Ejemplo de cableado del AM (460 V) con motores 1326AB
Kinetix 6000 IAM (inversor) o AM
Nota 14
Servomotores 1326AB (M2L/S2L) con retroalimentacin de alta resolucin Conector de retroalimentacin del motor (MF) (IAM/AM)
Abrazadera de blindaje de cable
Nota 9 0 1 2 3 Conector de W 4 alimentacin elctrica V 5 del motor (MP) U 6 7 Conector de 8 retroalimentacin del motor 9 (MF) 10 Conector de motor/ 11 freno resistivo (BC) 12 13 MBRK 14 MBRK + 15 COM
4 3 2 1
Green/Yellow 1/Blue 2/Black 3/Brown
Cable de alimentacin del motor 2090-XXNPMP-xxSxx Nota 15
D C B A W V U GND
Alimentacin de motor trifsico
A B C D E F K L N R S
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN GRAY WHT/GRAY ORANGE WHT/ORANGE BLUE
SIN+ SINCOS+ COSDATA+ DATA ECOM +9VDC TS+ TSCOM
1 2 3 4 5 10 14 6 7 11
Retroalimentacin del motor
Cable de freno 2090-UXNBMP-18Sxx Nota 15
6 5 4 3 2 1 BRBR+
Black White
C A
BRBR+
Freno del motor Termostato
PWR DBRK DBRK +
24 VCC suministrados por el usuario (1.2 A mx.) Conexiones del freno resistivo
Consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001, para obtener informacin sobre la tcnica apropiada de conexin a tierra. Cable de retroalimentacin 2090-XXNFMP-Sxx (conductor libre) Notas 15, 16
Kinetix 6000 IAM (inversor) o AM
Nota 14
Abrazadera de blindaje de cable
Cable de alimentacin elctrica de motor 1326-CPx1-xxx Nota 15
Servomotores 1326AB con retroalimentacin del dispositivo de resolucin
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Green/Yellow
Nota 9
Conector de alimentacin elctrica del motor (MP) Conector de retroalimentacin del motor (MF)
W V U
4 3 2 1
Braided Shield Black Black Black
8 7 3 2 1 T3 T2 GND
Alimentacin de motor T1 trifsico
MBRK MBRK + COM PWR DBRK DBRK +
Conector de motor/ freno resistivo (BC)
6 5 4 3 2 1
Black Black
6 4
B1 B2
Conector de retroalimentacin del motor (MF) (IAM/AM)
GREEN BLACK BLACK RED BLACK WHITE
Freno del motor
G H D E A B
24 VCC suministrados por el usuario (1.2 A mx.)
S2 S4 S1 S3 R1 R2
1 2 3 4 5 10
BRBR+
Conexiones del freno resistivo
Retroalimentacin del motor
5 9
K1 K2
Termostato
(1)
Cable de retroalimentacin 1326-CCU-xxx (conductor libre) Notas 15
TS+ TS-
16 17 S
Cable blindado
(1)
Para cablear el interruptor trmico en motores 1326AB (basados en dispositivo de resolucin) se requiere usar el juego de conector de bajo perfil (2090-K6CK-D15MF) y extensin de cable al conector de alimentacin elctrica. Los pines 16, 17 y S se filtran para evitar la transmisin de ruido al variador. Consulte en el documento Kinetix 6000 User Manual, publicacin 2094-UM001, las instrucciones de cableado y un diagrama.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
53
Ejemplo de cableado del AM (230 V) con motores serie H/F
Kinetix 6000 IAM (inversor) o AM
Nota 14
Servomotores serie H/F (230 V) con retroalimentacin incremental
Abrazadera de blindaje de cable
0 Nota 9 1 2 3 W Conector de 4 alimentacin elctrica V 5 del motor (MP) U 6 7 Conector de 8 retroalimentacin del 9 10 motor (MF) 11 12 13 MBRK 14 MBRK + 15 COM PWR DBRK DBRK +
Conector de motor/ freno resistivo (BC)
4 3 2 1
Green/Yellow 1/Blue 2/Black 3/Brown
Cable de alimentacin del motor 2090-XXNPH/HF-xxSxx Nota 15
D C B A W V GND
Alimentacin de U motor trifsico
Conector de retroalimentacin del motor (MF) (IAM/AM)
A B C D E F R P K J L M N T H S
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN WHT/BROWN BROWN GRAY
AM+ AMBM+ BMIM+ IMTS+ S3 +5VDC ECOM S2 S1 TS-
1 2 3 4 5 10 11 8 14 6 13 12
Juego de conector de cable de freno 9101-0330 Nota 15
Retroalimentacin del motor
6 5 4 3 2 1 BRBR+
Black White
B A
BRBR+
Freno del motor
24 VCC suministrados por el usuario (1.2 A mx.) Conexiones del freno resistivo
WHT/GRAY BLUE WHT/BLUE VIOLET WHT/VIOLET
Termostato
Consulte en la ilustracin del conector de bajo perfil (mostrada ms abajo) la tcnica correcta de conexin a tierra. Cable de retroalimentacin 2090-XXNFHF-Sxx (conductor libre) Notas 15, 16
Tcnica de conexin a tierra para blindaje de cable de retroalimentacin
Conector de bajo perfil (se muestra el 2090-K6CK-D15M)
Abrazadera Blindaje expuesto fijado debajo de la abrazadera. Tornillos de abrazadera (2) Voltee la abrazadera para asegurar los cables pequeos.
Publicacin 2094-IN001H-ES-P Julio de 2006
54
Servovaridor multiejes Kinetix 6000
Ejemplo de cableado del AM (230 V) con motores serie N
Kinetix 6000 IAM (inversor) o AM
Nota 14
Servomotores serie N (230 V) con retroalimentacin incremental
Abrazadera de blindaje de cable
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Nota 9
Conector de alimentacin elctrica del motor (MP) Conector de retroalimentacin del motor (MF)
W V U
4 3 2 1
Green/Yellow 1/Blue 2/Black 3/Brown
Cable de alimentacin del motor 2090-XXNPN-xxSxx Nota 15
E D C B A W
N/C GND
Conector de retroalimentacin del motor (MF) (IAM/AM)
V Alimentacin de U motor trifsico
A B C D E F R V K J L M U T H
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN WHT/BROWN BROWN GRAY
AM+ AMBM+ BMIM+ IMTS+ S3 +5VDC ECOM S2 S1 TS-
1 2 3 4 5 10 11 8 14 6 13 12
Juego de conector de cable de freno 9101-1698 Nota 15
Retroalimentacin del motor
MBRK MBRK + COM PWR DBRK DBRK +
Conector de motor/ freno resistivo (BC)
6 5 4 3 2 1 BRBR+
Black White
B A
BRBR+ N/C
Freno del motor
24 VCC suministrados C por el usuario (1.2 A mx.)
WHT/GRAY BLUE WHT/BLUE VIOLET WHT/VIOLET
Conexiones del freno resistivo
Termostato
Consulte en la ilustracin del conector de bajo perfil (mostrada ms abajo) la tcnica correcta de conexin a tierra.
Cable de retroalimentacin 2090-XXNFN-Sxx (conductor libre) Notas 15, 16
Tcnica de conexin a tierra para blindaje de cable de retroalimentacin
Conector de bajo perfil (se muestra el 2090-K6CK-D15M)
Abrazadera Blindaje expuesto fijado debajo de la abrazadera. Tornillos de abrazadera (2) Voltee la abrazadera para asegurar los cables pequeos.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
55
Ejemplo de cableado del AM (230 V) con motores serie Y
Kinetix 6000 IAM (inversor) o AM
Nota 14
Servomotores serie Y (230 V) con retroalimentacin incremental
Abrazadera de blindaje de cable
0 Nota 9 1 2 3 W Conector de 4 alimentacin elctrica V 5 del motor (MP) U 6 7 8 Conector de 9 retroalimentacin 10 del motor (MF) 11 12 13 Conector de motor/ 14 freno resistivo (BC) 15 MBRK MBRK + COM PWR DBRK DBRK +
4 3 2 1
Green/Yellow 3/Black 2/Black 1/Black
5 3 2 1
Cable flexible
GND V Alimentacin U de motor trifsico
Conector de retroalimentaci del motor (MF) (IAM/AM)
Cable de alimentacin del motor y freno 2090-XXNPY-xxSxx Nota 15
Retroalimentacin del motor
9 10 11 12
BLACK WHT/BLACK RED WHT/RED GREEN WHT/GREEN WHT/BLUE BLUE BROWN WHT/BROWN GRAY WHT/GRAY
AM+ AMBM+ BMIM+ IMS1 S2 S3 +5VDC ECOM DRAIN
1 2 3 4 5 10 12 13 8 14 6
Black Black
9 7
BRBR+
6 5 4 3 2 1 BRBR+
24 VCC suministrados por el usuario (1.2 A mx.) Conexiones del freno resistivo
13 14 Cable 15 flexible Freno 17 del motor 19 22 23 24
Consulte en la ilustracin del conector de bajo perfil (mostrada ms abajo) la tcnica correcta de conexin a tierra. Cable de retroalimentacin 2090-XXNFY-Sxx (conductor libre) Notas 15, 16, 17
Tcnica de conexin a tierra para blindaje de cable de retroalimentacin
Conector de bajo perfil (se muestra el 2090-K6CK-D15M)
Abrazadera Blindaje expuesto y cable de tierra fijados debajo de la abrazadera. Tornillos de abrazadera (2) Voltee la abrazadera para asegurar los cables pequeos.
Publicacin 2094-IN001H-ES-P Julio de 2006
56
Servovaridor multiejes Kinetix 6000
Ejemplo de control de un freno
La salida de rel del variador Kinetix 6000 (MBRK BC-5 y -6) es adecuada para controlar directamente un freno de motor, sujeto al lmite de voltaje de rel de 30 VCC y el lmite de corriente de rel segn se muestra en la siguiente tabla.
Lmite de corriente de rel del freno
Kinetix 6000 IAM/AM 2094-AC05-Mxx, -AC09-Mxx, 2094-AMP5, -AM01, -AM02 2094-BC01-Mxx, -BC02-Mxx, 2094-BMP5, -BM01, -BM02 2094-AC16-Mxx, -AC32-Mxx, 2094-AM03, -AM05 2094-BC04-Mxx, -BC07-Mxx, 2094-BM03, -BM05 Corriente nominal del freno, mx.
1.0 A
1.3 A 3.0 A
IMPORTANTE
En caso de que los requisitos de freno estn fuera de estos lmites, debe usarse un rel externo.
Corrientes nominales de bobina de < 1.0 A
Motores de freno compatibles F-4030, -4050, y -4075 H-3007 y -3016 H-4030, -4050, y -4075 N-2302 y -2304 N-3406, -3412, -4214 y -4220 N-5630, -5637 y -5647 Y-1002 y -1003 Y-2006 y -2012 Y-3023 TL-A110P-H, -A120P-H y -A130P-H TL-A220P-H y -A230P-H TL-A2530P-H y -A2540P-H TL-A410P-H
(1)
Corriente de bobina 0.69 A 0.60 A 0.69 A 0.28 A 0.36 A 0.71 A 0.26 A 0.31 A 0.37 A 0.208 A 0.375 A 0.396 A 0.746 A
Motores de freno compatibles MPL/MPF/MPS-x310, -x320, -x330 (1) MPL-x420, -x430, -x4520, -x4530, -x4540 (1) MPF-x430, -x4530, -x4540 (1) MPG-x004 (1) MPG-x010 (1) MPG-x025 (1) MPG-x050 (1) MPG-x110 (1)
Corriente de bobina 0.50 A 0.64 A 0.33 A 0.45 A 0.50 A 1.0 A
1326AB-B4xxx
0.88 A
Aplicable a motores de 230 V y 460 V.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
57
Corrientes nominales de bobina de > 1.0 A y 1.3 A
Motores de freno compatibles F-6100, -6200 y -6300 H-6100, -6200 y -6300
(1)
Corriente de bobina 1.30 A 1.13 A
Motores de freno compatibles MPL-x520, -x540, -x560, -x580 (1) MPF-B540 1326AB-B5xxx y -B7xxx
Corriente de bobina 1.05...1.28 A 1.20 A
Aplicable a motores de 230 V y 460 V.
Corrientes nominales de bobina de > 1.3 A y 3.0 A
Motores de freno compatibles H-8350 y -8500 Corriente de bobina 2.20 A Motores de freno compatibles MPL-B640, -B660, -B680, -B860, -B880, -B960, -B980 Corriente de bobina 1.91...2.19 A
IMPORTANTE
La salida de rel del variador Kinetix 6000 (MBRK BC-5 y -6) incluye un dispositivo de supresin de arcos. No se requiere diodo adicional ni MOV para supresin de arcos.
Publicacin 2094-IN001H-ES-P Julio de 2006
58
Servovaridor multiejes Kinetix 6000
Configure el IAM/AM
Siga estos pasos para configurar el IAM/AM. 1. Verifique que la alimentacin elctrica no est conectada al IAM/ AM y que los cables de fibra ptica SERCOS estn enchufados en los conectores Tx y Rx. Para verificar las conexiones del cable de fibra ptica, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001.
Para configurar El mdulo de eje integrado (AIM) Un mdulo de eje (AIM) Comience con Paso 2 Paso 3
2. Establezca la direccin de nodo base para el IAM; para ello ajuste el conmutador de direccin de nodo SERCOS. Las direcciones vlidas de nodo son 01...99. El conmutador de la izquierda establece el dgito ms significativo (MSD), mientras que el conmutador de la derecha establece el dgito menos significativo (LSD). Consulte en la tabla y figura siguientes la operacin del conmutador.
Para Incrementar la direccin de nodo (MSD/LSD) Decrementar la direccin de nodo (MSD/LSD) Presione El conmutador con el signo ms (+). El conmutador con el signo menos ().
Decrementa el MSD MSD Incrementa el MSD
Decrementa el LSD LSD Incrementa el LSD
Al establecer la direccin de nodo base en el IAM se determina la direccin de nodo para el IAM inversor. El direccionamiento de nodos de todas las ubicaciones de ranuras en el mismo riel de alimentacin elctrica se incrementa (desde el IAM inversor) de izquierda a derecha.
IMPORTANTE
Despus de establecer la direccin de nodo base, siempre desconecte y vuelva a conectar la alimentacin de control para inicializar el IAM.
IMPORTANTE
Cuando dos o ms IAM se conectan al mismo mdulo SERCOS interface, cada direccin de nodo debe ser nica. Consulte los ejemplos de direccionamiento de nodos en las pginas 59 y 60.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
59
Ejemplo 1 de direccionamiento de nodo
Mdulo 1756-MxxSE SERCOS interface
SERCOS interfaceTM CP OK
Chasis ControlLogix
Tx (rear) Rx (front)
Transmisin
Recepcin Anillo de fibra ptica SERCOS Recepcin Transmisin Kinetix 6000 Sistema 2 (riel de alimentacin elctrica de 2 ejes)
Recepcin Kinetix 6000 Sistema 1 (riel de alimentacin elctrica de 6 ejes)
Transmisin
17 = Direccin de nodo de AM (eje 2) 16 = Direccin de nodo base de IAM (eje 1) 15 = Direccin de nodo de mdulo de tapa ciega 14 = Direccin de nodo de mdulo de derivacin 13 = Direccin de nodo de AM (eje 4) 12 = Direccin de nodo de AM (eje 3) 11 = Direccin de nodo de AM (eje 2) 10 = Direccin de nodo base de IAM (eje 1)
En el ejemplo 1, el riel de alimentacin elctrica del sistema 1 Kinetix 6000 (6 ejes) contiene un IAM, tres AM, un SM y un mdulo de tapa ciega. El mdulo de derivacin y los mdulos de tapa ciega tienen una direccin de nodo asignada, pero no la usan. El riel de alimentacin elctrica del sistema 2 Kinetix 6000 (2 ejes) contiene un IAM y un AM. La direccin de nodo base del IAM (sistema 2) debe establecerse para una direccin de 16 8.
IMPORTANTE
La direccin de nodo para cada mdulo de eje se determina mediante el posicionamiento del conmutador de direccin de nodo base en el IAM. No coloque mdulos de eje a la derecha de los mdulos de derivacin o de tapa ciega. La distancia adicional entre ejes no adyacentes puede aumentar el ruido elctrico y la impedancia, y requiere tramos ms largos de cable de fibra ptica.
IMPORTANTE
Deben usarse los mdulos de tapa ciega para llenar cualquier ranura no ocupada en el riel de alimentacin elctrica. Sin embargo, los mdulos de tapa ciega tambin pueden retirarse y reemplazarse por un mdulo de eje o de derivacin en el futuro.
Publicacin 2094-IN001H-ES-P Julio de 2006
60
Servovaridor multiejes Kinetix 6000
Ejemplo 2 de direccionamiento de nodo
Mdulo 1756-MxxSE SERCOS interface
SERCOS interfaceTM CP OK
Chasis ControlLogix
Tx (rear) Rx (front)
Transmisin
Recepcin Anillo de fibra ptica SERCOS
Recepcin Kinetix 6000 (riel de alimentacin elctrica de 8 ejes)
Transmisin
08 = Direccin de nodo de mdulo de tapa ciega 07 = Direccin de nodo de AM (eje 4) 06 = No se usa (ranura del extremo derecho del AM) 05 = Direccin de nodo de AM (eje 3) 04 = No se usa (ranura del extremo derecho del AM) 03 = Direccin de nodo de AM (eje 2) 02 = No se usa (ranura del extremo derecho del IAM) 01 = Direccin de nodo base de IAM (eje 1)
En el ejemplo 2, el riel de alimentacin elctrica del Kinetix 6000 (8 ejes) contiene un IAM de doble anchura, dos AM de doble anchura, un AM de anchura normal y un mdulo de tapa ciega. El mdulo de tapa ciega tiene una direccin de nodo asignada, pero no la usa. La ranura del extremo izquierdo de un mdulo de doble anchura determina la direccin de nodo. Por lo tanto, en el ejemplo anterior, las direcciones de nodo 02, 04 y 06 (las ranuras del extremo derecho de los mdulos de doble anchura) no se usan.
IMPORTANTE
Deben usarse los mdulos de tapa ciega para llenar cualquier ranura no ocupada en el riel de alimentacin elctrica. Sin embargo, los mdulos de tapa ciega tambin pueden retirarse y reemplazarse por un mdulo de eje o de derivacin en el futuro.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
61
3. Establezca la velocidad en baudios del SERCOS utilizando los microinterruptores 2 y 3, como se muestra en la figura siguiente.
Para esta velocidad en baudios 4 Mbps 8 Mbps Establezca el conmutador 2 en la posicin OFF (desconectado) ON (conectado) Establezca el conmutador 3 en la posicin ON (conectado) OFF (desconectado)
4. Establezca la potencia ptica SERCOS en nivel alto; para ello ajuste el microinterruptor 1 como se muestra en la siguiente figura.
Para este nivel de potencia ptica Bajo Alto Establezca el conmutador 1 en la posicin OFF ON
Mdulo de eje integrado, vista superior (2094-ACxx-Mxx-S)
Microinterruptores establecidos para aplicaciones de 4 Mbps (ajuste de alta potencia)
Microinterruptores establecidos para aplicaciones de 8 Mbps (ajuste de alta potencia)
ON OFF
ON OFF
Conmutador en posicin OFF (desconectado)
Conmutadores pticos de alimentacin y velocidad en baudios SERCOS
Nota: Los nmeros de conmutadores que se muestran en el IAM estn en posicin invertida en esta orientacin. Conmutador en posicin Los nmeros de los conmutadores ON (conectado)
5. Repita los pasos 3 y 4 para cada mdulo de eje 2094-xMxx.
Publicacin 2094-IN001H-ES-P Julio de 2006
62
Servovaridor multiejes Kinetix 6000
Configure el mdulo Logix SERCOS interface
Este procedimiento supone que usted ha cableado su sistema Kinetix 6000 y ha configurado los conmutadores de velocidad en baudios y potencia ptica del Kinetix 6000.
IMPORTANTE
Para que el variador Kinetix 6000 se comunique con el mdulo SERCOS interface (los tres indicadores LED en el mdulo se encendern de color verde fijo), su software RSLogix 5000 debe ser revisin 11.0 o posterior.
Para obtener ms detalles sobre el software RSLogix 5000 en lo que respecta a la configuracin de los mdulos ControlLogix, CompactLogix o SoftLogix SERCOS, consulte la seccin Recursos adicionales en la pgina 99.
Configure el controlador Logix
Siga estos pasos para configurar el controlador Logix. 1. Conecte la alimentacin elctrica al chasis Logix/computadora personal que contiene el mdulo SERCOS interface y abra el software RSLogix 5000. 2. En el men File, seleccione New. Se abre el dilogo New Controller. Seleccione el tipo de controlador. Seleccione la revisin del software RSLogix 5000. Asigne nombre al archivo. Seleccione el tamao del chasis Logix. Seleccione la ranura del procesador Logix.
3. Haga clic en OK. 4. En el men Edit, seleccione Controller Properties. Se abre el dilogo Controller Properties.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
63
5. Seleccione la ficha Date and Time.
6. Seleccione el cuadro Make this controller the Coordinated System Time master.
IMPORTANTE
Slo un procesador ControlLogix puede asignarse como maestro de hora coordinada del sistema.
7. Haga clic en OK.
Configure el mdulo Logix
Siga estos pasos para configurar el mdulo Logix. 1. Haga clic con el botn derecho del mouse en I/O Configuration en el dilogo del explorador y seleccione New Module. Se abre el dilogo Select Module. 2. Expanda la categora Motion y seleccione 1756-MxxSE, -L60M03SE, 1768-M04SE o 1784-PM16SE como corresponda segn su configuracin actual de hardware. 3. Haga clic en OK.
Publicacin 2094-IN001H-ES-P Julio de 2006
64
Servovaridor multiejes Kinetix 6000
Se abre el dilogo New Module. El nuevo mdulo aparece bajo la carpeta I/O Configuration en el dilogo del explorador.
Asigne nombre al mdulo. Seleccione la ranura donde reside su mdulo (ranura del extremo izquierdo = 0). Seleccione una opcin de codificacin electrnica (seleccione Disable Keying si no est seguro). Marque la casilla Open Module Properties.
4. Haga clic en OK. Se abre el dilogo Module Properties. 5. Seleccione la ficha SERCOS Interface y consulte la tabla siguiente.
Mdulo Logix SERCOS 1756-M03SE o 1756-L60M03SE 1756-M08SE 1756-M16SE o 1784-PM16SE 1768-M04SE
Nmero de ejes Hasta 3 Hasta 8 Hasta 16 hasta 4
Velocidad de datos
4 u 8 Mbps
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
65
6. Seleccione los valores para Data Rate, Cycle Time y Optical Power. Verifique que la seleccin de Data Rate coincida con los microinterruptores 2 y 3 (velocidad en baudios) establecidos en el IAM o AM, o utilice la opcin Auto Detect. Establezca Cycle Time segn la tabla siguiente.
Nmero de ejes hasta 2 4 Mbps hasta 4 hasta 8 No se aceptan los ejes 9...16 hasta 4 8 Mbps hasta 8 hasta 16 0.5 ms 1 ms 2 ms Tiempo de ciclo 0.5 ms 1 ms 2 ms
Velocidad de datos
El nmero de ejes/mdulo est limitado al nmero de ejes mostrado en el paso 5. Verifique que el valor de Optical Power (alto o bajo) coincida con el microinterruptor 1 segn lo establecido en el IAM y AM. El valor predeterminado de Transition to Phase es 4 (fase 4). El valor de Transition to Phase detendr el anillo en la fase especificada.
7. Haga clic en OK. 8. Repita los pasos 1...7 para cada mdulo Logix.
Configure los mdulos Kinetix 6000
Siga estos pasos para configurar los mdulos Kinetix 6000. 1. Haga clic con el botn derecho del mouse en el modulo Logix que acaba de crear, y seleccione New Module. Se abre el dilogo Select Module. 2. Expanda la categora Drives y seleccione el 2094-xCxx-Mxx (IAM) o 2094-xMxx (AM) como corresponda segn su configuracin actual de hardware.
Publicacin 2094-IN001H-ES-P Julio de 2006
66
Servovaridor multiejes Kinetix 6000
3. Haga clic en OK. Se abre el dilogo New Module. Asigne nombre al mdulo. Establezca la direccin de nodo.
Establezca la direccin de nodo en el software de manera que coincida con la seleccin de nodo en el variador. Consulte Configure el IAM/AM, Paso 2, en la pagina 58. Seleccione una de las opciones de codificacin electrnica. Marque la casilla Open Module Properties.
4. Haga clic en OK. 5. Seleccione la ficha Associated Axes.
6. Seleccione el botn New Axis. Se abre el dilogo New Tag. Asigne nombre al eje. Seleccione AXIS_SERVO_DRIVE como Data Type.
7. Haga clic en OK. El eje aparece bajo la carpeta Ungrouped en el dilogo del explorador. 8. Asigne su eje a la direccin de nodo (como se muestra en el siguiente dilogo).
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
67
Con el firmware revisin 1.80 posterior del variador, y el software RSLogix 5000 revisin 13 o posterior, es posible configurar el puerto de retroalimentacin de eje auxiliar como eje de Feedback Only. Con esta funcin, cada IAM (inversor) o AM puede configurarse para que aparezca como dos ejes/nodos en el anillo SERCOS. El nodo base es el servoeje que utiliza retroalimentacin de motor y el nodo base (ms 128) es un eje de retroalimentacin solamente que utiliza el puerto de retroalimentacin auxiliar (como se muestra a continuacin).
Si un eje est asociado con el nodo de eje auxiliar, la opcin Axis Configuration de la ficha General del dilogo Axis Properties se establece en Feedback Only (como se muestra a continuacin).
9. Seleccione la ficha Power.
Publicacin 2094-IN001H-ES-P Julio de 2006
68
Servovaridor multiejes Kinetix 6000
10. Seleccione el nmero de catlogo del regulador de bus u otro como corresponda segn su configuracin actual de hardware.
Si su AIM est y su configuracin de hardware incluye esta opcin de derivacin Derivaciones externas solamente Configurado como IAM o IAM lder (bus comn) (1) Mdulo de derivacin Boletn 2094 (montado en riel) Mdulo de derivacin pasiva Boletn 1394 (conectado al 2094-BSP2) Mdulo de derivacin activa Boletn 1336 Configurado como IAM seguidor (2)
(1) (2)
Seleccione Internal o <none> 2094-BSP2 1394-SRxxxx Internal o <none> CommonBus Follow
N/A. Las derivaciones estn desactivadas en el IAM seguidor.
El variador no aceptar la seleccin Internal, <none>, 2094-BSP2 1394-SRxxxx si el voltaje de bus de CC est presente sin tener alimentacin trifsica conectada. El variador no aceptar la seleccin CommonBus Follow si est conectada la alimentacin trifsica.
ATENCIN
Para evitar daar el mdulo de derivacin externa Boletn 1394, verifique que est instalado el fusible correcto de 230 V o 460 V antes de conectar la alimentacin elctrica. Consulte Especificaciones del disyuntor/fusible en la pgina 95 para obtener ms informacin.
IMPORTANTE
Cuando se configura para usar mdulos de derivacin Boletn 1394 2094, el atributo de capacidad de regulador de bus IAM muestra la utilizacin del mdulo de derivacin o del mdulo de derivacin pasiva en lugar de la utilizacin de la resistencia de derivacin interna IAM.
IMPORTANTE
Las aplicaciones de bus comn de CC deben calcular la capacitancia de bus total y la capacitancia de bus adicional, y establecer el parmetro Add Bus Cap (x:x:x599) usando el software DriveExplorer. Para obtener ms informacin, consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001.
11. Haga clic en OK. 12. Repita los pasos 1...8 para cada mdulo de eje 2094-xMxx.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
69
Configure el grupo de movimiento
Siga estos pasos para configurar el grupo de movimiento. 1. Haga clic con el botn derecho del mouse en Motion Groups en el dilogo del explorador y seleccione New Motion Group. Se abre el dilogo New Tag. 2. Asigne nombre al grupo de movimiento. 3. Haga clic en OK. Aparece New Group bajo la carpeta Motion Groups. 4. Haga clic con el botn derecho del mouse en el nuevo grupo de movimiento y seleccione Properties. Se abre el dilogo Motion Group Properties.
5. Seleccione la ficha Axis Assignment y mueva los ejes (creados anteriormente) de Unassigned a Assigned. 6. Seleccione la ficha Attribute y edite los valores predeterminados como corresponda segn su aplicacin. 7. Haga clic en OK.
Publicacin 2094-IN001H-ES-P Julio de 2006
70
Servovaridor multiejes Kinetix 6000
Configure las propiedades de los ejes
Siga estos pasos para configurar las propiedades de los ejes. 1. Haga clic con el botn derecho del mouse en un eje en el dilogo del explorador y seleccione Properties. Se abre el dilogo Axis Properties.
2. Seleccione la ficha Drive/Motor. Establezca el amplificador Kinetix 6000 (2094-xCxx-Mxx). Establezca el nmero de catlogo del motor. Cuando la opcin Drive Enable Input Checking est establecida (opcin predeterminada), significa que se requiere una seal de hardware de entrada de habilitacin de variador. Desmarque la casilla para eliminar dicho requisito.
Para obtener los nmeros de catlogo del amplificador y el motor, consulte la placa del fabricante del amplificador y del motor. 3. Seleccione la ficha Motor Feedback y verifique que la opcin Feedback Type mostrada sea apropiada segn su configuracin actual de hardware. 4. Haga clic en OK. 5. Repita los pasos 1...4 para cada mdulo de eje 2094-xMxx. 6. Verifique su programa Logix y guarde el archivo.
IMPORTANTE
Consulte el documento Kinetix 6000 User Manual, publicacin 2094-UM001, para establecer los tiempos de retardo del freno del motor.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
71
Descargue el programa
Despus de completar la configuracin Logix, usted debe descargar el programa al procesador Logix.
Conecte la alimentacin elctrica al variador Kinetix 6000
Este procedimiento supone que usted ha cableado y configurado su sistema Kinetix 6000 (con o sin el LIM) y su mdulo SERCOS interface. Para evitar el peligro de choque elctrico, complete todo el montaje y cableado antes de conectar la alimentacin elctrica. Una vez que se conecta la alimentacin elctrica, los terminales del conector pueden tener voltaje presente aunque no se est usando la unidad.
ATENCIN
Consulte el documento Line Interface Module Installation Instructions, publicacin 2094-IN005, durante la resolucin de problemas con los indicadores de estado del LIM, y para la ubicacin de los disyuntores, conectores e indicadores de estado del LIM. Siga estos pasos para conectar la alimentacin elctrica al sistema Kinetix 6000. 1. Desconecte la carga del motor. Para evitar lesiones personales o dao al equipo, desconecte la carga del motor. Asegrese de que cada motor est libre de vnculos cuando conecte inicialmente la alimentacin elctrica al sistema.
ATENCIN
2.
Si la alimentacin de control Entonces 1. Verifique que CB1, CB2 y CB3 estn en la posicin OFF. 2. Conecte la alimentacin de entrada trifsica al conector de lnea de VCA del LIM. Se surte desde un LIM 3. Coloque CB3 en la posicin ON. 4. Coloque CB2 en la posicin ON. 5. Vaya al Paso 3 principal. No se surte desde un LIM 1. Conecte la alimentacin de control (95...264 VCA) al AIM (conector CPD). 2. Vaya al Paso 3 principal.
Publicacin 2094-IN001H-ES-P Julio de 2006
72
Servovaridor multiejes Kinetix 6000
3. Observe el indicador LED de alimentacin de la lgica del IAM/AM.
Seven Segment Fault Status LED Logic Power LED
Si el indicador LED de alimentacin de lgica est: Encendido No est encendido
Entonces Vaya al Paso 4. 1. Verifique las conexiones de la alimentacin de control. 2. Regrese al Paso 2 principal.
4.
Si la alimentacin trifsica Entonces 1. Coloque CB1 en la posicin ON. 2. Verifique que la seal de entrada de habilitacin de hardware (pin 2 de IOD) para cada eje se encuentre a 0 volts. Elimine la conexin entre IOD-1 e IOD-2 si est presente. 3. Vaya al Paso 5 principal. 1. Conecte la alimentacin de entrada de 195...265 VCA (230 V) o 324...528 VCA (460 V) al IAM (conector IPD). No se surte desde un LIM 2. Verifique que la seal de entrada de habilitacin de hardware (pin 2 de IOD) para cada eje se encuentre a 0 volts. Elimine la conexin entre IOD-1 e IOD-2 si est presente. 3. Vaya al Paso 5 principal.
Se surte desde un LIM
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
73
5. Observe el indicador LED de estado de siete segmentos del IAM/AM. El indicador de siete segmentos parpadear inicialmente la direccin de nodo SERCOS y seguidamente cambiar de una fase a otra, hasta llegar a la configuracin final (fase 4).
Indicador LED de estado de siete segmentos del IAM/AM Cambiando activamente (fase 0) Estado El variador est buscando un anillo SERCOS cerrado. Espere hasta llegar a la fase 1 o realice la accin correctiva hasta llegar a la fase 1. El variador est buscando nodos activos. Espere hasta llegar a la fase 2 o realice la accin correctiva hasta llegar a la fase 2. El variador est configurando nodos para la comunicacin. Espere hasta llegar a la fase 3 o realice la accin correctiva hasta llegar a la fase 3. El variador est configurando parmetros especficos del dispositivo. Espere hasta llegar a la fase 4 o realice la accin correctiva hasta llegar a la fase 4. El variador est configurado y activo. El variador presenta un fallo. Haga lo siguiente Verifique las conexiones de fibra ptica.
Mostrando un 1 fijo (fase 1)
Verifique el direccionamiento del nodo. Verifique la configuracin del variador, el programa y el motor, y comprelos con el hardware instalado. Verifique el nmero de catlogo del motor y comprelo con la seleccin. (1) Vaya al Paso 6. Vaya a Cdigos de error en la pagina 79.
Mostrando un 2 fijo (fase 2)
Mostrando un 3 fijo (fase 3) Mostrando un 4 fijo (fase 4) Mostrando una E parpadeante seguida de dos nmeros
(1)
Usted puede obtener informacin de diagnstico del mdulo al resaltar el nombre del mdulo en el software RSLogix 5000. El fallo Pseudo Key Failure a menudo indica que la seleccin del motor no coincide con el motor instalado.
6. Observe los tres indicadores LED de estado ubicados en la parte frontal del IAM/AM.
Indicador LED de estado Variador Condicin Apagado Rojo continuo Verde parpadeante Com. Verde fijo Apagado Estado Condicin normal El variador presenta un fallo Estableciendo comunicacin con la red Comunicacin lista No hay anillo presente Haga lo siguiente Observe el indicador LED de estado de la comunicacin. Vaya a Indicadores de estado de IAM/AM en la pagina 85. Espere hasta que se ponga verde fijo. Observe el indicador LED de estado del bus. Vaya a Indicadores de estado de IAM/AM en la pagina 85. 1. Verifique que la entrada de habilitacin de hardware (IOD-2) est abierta. Verde fijo Bus Verde parpadeante (1) Desactivado
(1)
El eje est habilitado cuando el estado debera ser inhabilitado
2. Verifique que la instruccin MSO no sea comandada en el software RSLogix 5000. 3. Regrese a Conecte la alimentacin elctrica al variador Kinetix 6000 en la pagina 71.
El bus est activo; el eje est inhabilitado (estado normal) El bus de CC no est presente
Vaya al Paso 7. Vaya a Indicadores de estado de IAM/AM en la pagina 85.
El IAM seguidor presenta un retardo de 2.5 segundos despus de aplicar el voltaje del bus de CC, antes de que comience a parpadear el indicador LED de estado del bus. Esto proporciona al bus lder tiempo para completar la precarga.
Publicacin 2094-IN001H-ES-P Julio de 2006
74
Servovaridor multiejes Kinetix 6000
7. Observe los tres indicadores LED SERCOS en el mdulo SERCOS.
Tres indicadores LED SERCOS Estado Verde y rojo parpadeante Verde fijo No parpadean de color verde y rojo/no estn de color verde fijo Estableciendo comunicacin Comunicacin lista Mdulo SERCOS interface con fallo Haga lo siguiente Espere hasta que los tres indicadores LED se pongan verde fijo. Vaya a Pruebe y ajuste los ejes. Consulte el manual de Logix apropiado para obtener las instrucciones especficas as como informacin sobre resolucin de problemas.
Pruebe y ajuste los ejes
Este procedimiento supone que usted configur el variador Kinetix 6000 y el mdulo SERCOS interface, y conect la alimentacin elctrica al sistema.
IMPORTANTE
Antes de proceder con la prueba y ajuste de los ejes, verifique que los indicadores LED de estado y de siete segmentos del IAM y del AM estn como se describe en el paso 6 en la pgina 73.
Para obtener ayuda con el uso del software RSLogix 5000 en lo que se refiere a probar y ajustar los ejes con los mdulos ControlLogix, CompactLogix o SoftLogix SERCOS, consulte la seccin Recursos adicionales en la pgina 99.
Pruebe los ejes
Siga estos pasos para probar los ejes. 1. Verifique que se haya retirado la carga de cada eje. 2. Haga clic con el botn derecho del mouse en la carpeta Motion Group en el dilogo del explorador y seleccione Axis Properties. Aparece el dilogo Axis Properties.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
75
3. Seleccione la ficha Hookup.
4. Seleccione 2.0 como el nmero de revoluciones para la prueba (o cualquier otro nmero ms apropiado para su aplicacin).
Esta prueba Prueba de marcador Prueba de retroalimentacin Realiza esta prueba Verifica la capacidad de deteccin de marcador a medida que usted gira el eje del motor. Verifica que las conexiones de retroalimentacin estn correctamente cableadas a medida que usted gira el eje del motor.
Verifica que las conexiones de alimentacin del retroalimentacin estn correctamente Prueba de comando y retroalimentacin motor y de a medida que ordena el giro del motor. cableadas Adems, le permite definir la polaridad.
5. Aplique la seal de entrada de habilitacin de hardware (IOD-2) para el eje que est probando. Para evitar lesiones personales o dao al equipo, aplique la seal ENABLE de 24V (IOD-2) slo al eje que est probando.
ATENCIN
6. Seleccione el botn Test (marcador/retroalimentacin/comando y retroalimentacin) para verificar las conexiones. Se abre el dilogo Online Command. Siga las instrucciones de prueba que aparecen en la pantalla. Cuando termine la prueba, Command Status cambiar de Executing a Command Complete.
Publicacin 2094-IN001H-ES-P Julio de 2006
76
Servovaridor multiejes Kinetix 6000
7. Haga clic en OK. Se abre el dilogo Online Command Apply Test (pruebas de retroalimentacin y comando, y de retroalimentacin solamente). Cuando termine la prueba, Command Status cambiar de Executing a Command Complete.
8. Haga clic en OK.
Si La prueba se realiza satisfactoriamente, aparecer este dilogo. Entonces 1. Haga clic en OK. 2. Quite la seal de entrada de habilitacin de hardware (IOD-2). 3. Vaya a Ajuste los ejes.
1. Haga clic en OK. La prueba no se realiza satisfactoriamente, aparecer este dilogo. 2. Verifique que el indicador LED de estado del bus se encienda de color verde fijo durante la prueba. 3. Verifique que la seal de entrada de habilitacin de hardware (IOD-2) se aplique al eje que usted est probando. 4. Verifique la constante de conversin introducida en la ficha Conversion. 5. Regrese al Paso 6 principal y ejecute nuevamente la prueba.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
77
Ajuste los ejes
Siga estos pasos para ajustar los ejes. 1. Verifique que la carga siga desconectada del eje que se est ajustando. Para reducir la posibilidad de una respuesta impredecible del motor, ajuste el motor primero con la carga desconectada; a continuacin, reconecte la carga y realice el procedimiento de ajuste nuevamente para proporcionar una respuesta de operacin precisa.
ATENCIN
2. Seleccione la ficha Tune.
3. Introduzca los valores para Travel Limit y Speed. En este ejemplo, Travel Limit = 5 y Speed = 10. El valor actual de las unidades programadas depender de su aplicacin. 4. Seleccione el valor para Direction (la opcin predeterminada es Forward Uni-directional). 5. Marque las casillas de Tune como corresponda segn su aplicacin. 6. Aplique la seal de entrada de habilitacin de hardware (IOD-2) para el eje que est ajustando. Para evitar lesiones personales o dao al equipo, aplique la seal ENABLE de 24V (IOD-2) slo al eje que usted est ajustando.
ATENCIN
7. Seleccione el botn Start Tuning para autoajustar el eje.
Publicacin 2094-IN001H-ES-P Julio de 2006
78
Servovaridor multiejes Kinetix 6000
Se abre el dilogo Online Command Tune Servo. Cuando termine la prueba, Command Status cambiar de Executing a Command Complete.
8. Haga clic en OK. Se abre el dilogo Tune Bandwidth.
Los valores reales de ancho de banda (Hz) dependen de su aplicacin y pueden requerir ajuste cuando el motor y la carga estn conectados. Registre sus datos de ancho de banda para referencia futura. 9. Haga clic en OK. Se abre el dilogo Online Command Apply Tune. Cuando termine la prueba, Command Status cambiar de Executing a Command Complete.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
79
10. Haga clic en OK.
Si La prueba se realiza satisfactoriamente, aparecer este dilogo. Entonces 1. Haga clic en OK. 2. Quite la seal de entrada de habilitacin de hardware (IOD-2) aplicada anteriormente. 3. Vaya al Paso 11.
La prueba no se realiza satisfactoriamente, aparecer este dilogo.
1. Haga clic en OK. 2. Haga un ajuste de la velocidad del motor. 3. Para obtener ms informacin, consulte el correspondiente manual de configuracin e instalacin del mdulo de control de movimiento Logix. 4. Regrese al Paso 7 y ejecute nuevamente la prueba.
11. Repita el procedimiento de Pruebe y ajuste los ejes para cada eje.
Interprete los indicadores de estado
Consulte las siguientes tablas de resolucin de problemas para identificar fallos, las posibles causas y las acciones apropiadas para resolver los fallos. Si el fallo persiste despus de tratar de resolver el problema, comunquese con el representante de ventas de Rockwell Automation para mayor asistencia.
Cdigos de error
La siguiente lista de sntomas problemticos (no muestran cdigo de error) y fallos con cdigos de error asignados est diseada para ayudarle a resolver anomalas. Cuando se detecte un fallo, el indicador LED de siete segmentos mostrar una E seguida del cdigo de error de dos dgitos parpadeante, un dgito a la vez. Esto se repetir hasta que se borre el cdigo de error.
Cdigo de error Mensaje de fallo RSLogix (HIM)
Problema o sntoma
Causa potencial No hay alimentacin de CA o alimentacin de lgica auxiliar Mal funcionamiento de la fuente de alimentacin elctrica interna. Error de cableado del motor. Seleccion el motor incorrecto.
Posible resolucin Verifique que la alimentacin de control de CA est conectada al sistema Kinetix 6000. Llame al representante de ventas de Rockwell Automation a fin de devolver el mdulo para su reparacin. Revise el cableado del motor. Ejecute la prueba Hookup en el software RSLogix 5000. Verifique que est seleccionado el motor correcto.
El indicador de alimentacin elctrica (PWR) no est encendido
El motor salta cuando se habilita inicialmente.
Publicacin 2094-IN001H-ES-P Julio de 2006
80
Servovaridor multiejes Kinetix 6000
Cdigo de error
Mensaje de fallo RSLogix (HIM)
Problema o sntoma Las E/S digitales no funcionan correctamente.
Causa potencial La fuente de alimentacin elctrica de E/S est desconectada. Fusible fundido
Posible resolucin Verifique las conexiones y la fuente de alimentacin de las E/S. Llame al representante de ventas de Rockwell Automation a fin de devolver el mdulo para su reparacin. Haga funcionar la unidad dentro (no por encima) del valor de par continuo nominal para la temperatura ambiente, de 40 C (104 F) como mximo. Baje la temperatura ambiente; aumente el enfriamiento del motor. Verifique el cableado del motor en el conector MF del IAM/AM. Verifique que se haya seleccionado el motor correcto. Verifique la continuidad del cable de alimentacin elctrica del motor y del conector. Desconecte los cables de alimentacin elctrica del motor. Si tiene dificultad para hacer girar el motor manualmente, quizs haya que reemplazarlo. Compruebe si hay rendijas de ventilacin obstruidas o el ventilador est defectuoso. Asegrese de que el enfriamiento no est restringido por no haber suficiente espacio alrededor de la unidad. Verifique que la temperatura ambiente no est demasiado alta. Haga funcionar la unidad dentro del rango nominal de alimentacin continua. Reduzca las tasas de aceleracin. Desconecte todas las conexiones de alimentacin elctrica y del motor, y realice una comprobacin de continuidad desde el bus de CC hasta las salidas U, V y W del motor. Si hay continuidad, verifique que no haya un cortocircuito en los cables entre los terminales o enve el variador para su reparacin. Revise el cableado. Verifique el perfil de movimiento. Verifique la configuracin del eje en el software. Revise el cableado del encoder del motor. Ejecute la prueba Hookup en el software RSLogix 5000. Verifique el nivel de voltaje de la alimentacin de CA de entrada. Revise la fuente de alimentacin de CA para determinar si hay breves interrupciones o una cada de la lnea. Instale una fuente de alimentacin elctrica ininterrumpible (UPS) en la entrada de CA.
E00
BusUndervoltage Fault (Fusible fundido)
Se detect un fusible fundido en la tarjeta de circuito impreso del inversor
E04
MotorOvertemp Fault (Sobretemperatura del motor)
Se dispar el interruptor trmico del motor
Alta temperatura ambiente del motor y/o Corriente excesiva
Error de cableado del motor. Seleccin incorrecta del motor. Cables del motor en cortocircuito.
Bobinado del motor cortocircuitado internamente.
E05
DriveOvercurrent Fault (Fallo de alimentacin elctrica)
La autoproteccin del mdulo de alimentacin inteligente (IPM) est indicando una condicin de fallo mayor relacionada con la alimentacin elctrica.
La temperatura del Kinetix 6000 est demasiado alta.
Operacin por encima de la clasificacin de la alimentacin continua y/o las clasificaciones ambientales del producto.
El Kinetix 6000 tiene un componente en cortocircuito, con sobrecorriente o con fallo.
E06
HardOvertravel Fault (+/ sobrecarrera debida al hardware) MotFeedbackFault (Prdida de retroalimentacin del motor)
El eje se movi ms all de los lmites de desplazamiento fsico en direccin positiva/negativa.
La entrada de sobrecarrera dedicada est inactiva.
E07
El cableado de retroalimentacin est abierto, en cortocircuito o ausente.
E09
BusUndervoltage Fault (Voltaje insuficiente en el bus)
Con la alimentacin trifsica presente, el voltaje del bus de CC est por debajo de los lmites.
El voltaje del bus de CC cay por debajo del lmite de voltaje insuficiente mientras estaba habilitado un eje en el riel de alimentacin elctrica del seguidor.
El voltaje del bus de CC para el sistema de 460 V est por debajo de 275 V El voltaje del bus de CC para el sistema de 230 V est por debajo de 137 V
Inhabilite el eje del seguidor antes de desconectar la alimentacin elctrica.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
81
Cdigo de error
Mensaje de fallo RSLogix (HIM)
Problema o sntoma
Causa potencial Regeneracin excesiva de la alimentacin elctrica. Cuando el motor es accionado por una fuente de alimentacin mecnica externa, puede regenerar demasiada energa pico a travs de la fuente de alimentacin elctrica del variador. El sistema no puede protegerse a s mismo de una sobrecarga. El voltaje del bus de CC para el sistema de 460 V est por encima de 820 V El voltaje del bus de CC para el sistema de 230 V est por encima de 410 V
Posible resolucin
E10
DriveOvervoltage Fault (Sobrevoltaje del bus)
El voltaje del bus de CC est por encima de los lmites.
Cambie el perfil de movimiento o de desaceleracin. Use un sistema de mayor tamao (motor y variador Kinetix 6000). Instale un mdulo de derivacin.
Verifique que la entrada se encuentre dentro de las especificaciones.
E11
MotFeedbackFault (Estado ilegal de Hall) Softovertravel Fault (+/ sobrecarrera debida al software) OverSpeedFault (Fallo de sobrevelocidad)
El estado de las entradas de retroalimentacin de Hall es incorrecto.
Conexiones defectuosas.
Verifique el cableado Hall en el conector MF del IAM/AM. Verifique la fuente de alimentacin de 5 V al encoder. Verifique el perfil de movimiento. Verifique que los valores de sobrecarrera sean correctos. Revise los cables para determinar si presentan ruido. Revise el ajuste. Aumente la ganancia de prealimentacin. Aumente el lmite de error o tiempo de seguimiento. Verifique el ajuste del lazo de posicin. Verifique el dimensionamiento del sistema. Verifique la integridad mecnica del sistema dentro de los lmites de las especificaciones. Utilice cables blindados con pares trenzados. Encamine la retroalimentacin lejos de posibles fuentes de ruido. Compruebe las conexiones a tierra del sistema. Reemplace el motor/encoder. Verifique el cableado del encoder auxiliar. Verifique la seleccin del motor. Verifique que el motor acepta identificacin automtica. Verifique el cableado del encoder del motor.
E16
La posicin del eje excedi el mximo valor definido por software.
E18
La velocidad del motor excedi el 150% de la velocidad nominal mxima. El punto de disparo del 100% es determinado por el menor de los lmites de velocidad del usuario o la velocidad base nominal del motor.
E19
PositionErrorFault (Error de seguimiento de posicin)
Se excedi el lmite de error de posicin.
E20
MotFeedbackFault (AQB retroalim. motor)
Error de estado del encoder del motor
El encoder del motor encontr una transicin ilegal.
E21
AuxFeedbackFault (Com. retroalimentacin aux.) MotFeedbackFault (Com. retroalimentacin motor)
No se estableci comunicacin con un encoder inteligente.
E30
No se estableci comunicacin con un encoder inteligente.
Publicacin 2094-IN001H-ES-P Julio de 2006
82
Servovaridor multiejes Kinetix 6000
Cdigo de error
Mensaje de fallo RSLogix (HIM)
Problema o sntoma
Causa potencial
Posible resolucin Revise el cableado de alimentacin elctrica del motor. Revise el cableado de alimentacin de entrada. Reemplace el motor. Desconecte del variador el cable de alimentacin elctrica del motor y habilite el variador con un lmite de corriente establecido en 0. Si el fallo se borra, significa que existe un error de cableado o un problema interno del motor. Si el fallo persiste, llame al representante de ventas. Desconecte la conexin a tierra de la entrada de alimentacin de control. Cablee la alimentacin de control para usar la alimentacin principal como se muestra en la pgina 40. Aada un transformador de aislamiento para la alimentacin de control. Revise el voltaje de CA de entrada en todas las fases. Llame al representante de ventas. Reduzca las tasas de aceleracin. Reduzca el ciclo de trabajo (encendido/ apagado) del movimiento comandado. Aumente el tiempo permitido para el movimiento. Use un convertidor Kinetix 6000 de mayor tamao. Compruebe si hay rendijas de ventilacin obstruidas o el ventilador est defectuoso. Asegrese de que el enfriamiento no resulte restringido por insuficiente espacio alrededor de la unidad. Revise el voltaje de CA de entrada en todas las fases. Inhabilite el eje antes de desconectar la alimentacin elctrica. Verifique si el cable de fibra ptica est presente y correctamente conectado. Verifique que no hayan impedimentos al movimiento de la puesta en marcha, tales como lmites basados en hardware. Aumente la corriente de deteccin automtica si existen condiciones de alta friccin o carga. Revise el cableado del encoder o del motor usando diagnsticos de cableado. Inhabilite el fallo de entrada de habilitacin del variador. Verifique que la entrada de hardware de habilitacin del variador est activa cada vez que se habilite el variador por software.
Error de cableado. Cortocircuito a tierra interno del motor.
E34
GroundShortFault (Fallo de tierra)
Se detect una corriente a tierra excesiva en el convertidor.
Mal funcionamiento interno.
Terminal de alimentacin de control conectado a tierra (se aplica a sistemas de 230 V solamente)
E35
DriveUndervoltage Fault (Fallo de precarga)
Fall el ciclo de precarga del convertidor.
Bajo voltaje de la entrada de CA. Mal funcionamiento interno.
E36
DriveOvertemp Fault (Sobretemperatura del sistema)
Se dispar el interruptor trmico del convertidor.
Existe excesivo calor en la circuitera de alimentacin elctrica.
E37
PowerPhaseLoss Fault (Fallo por prdida de fase)
Una o ms fases de la alimentacin de CA de entrada estn ausentes. Se habilit el eje cuando se desconect la alimentacin principal (trifsica). Se habilit el eje del seguidor del bus comn cuando se desconect la alimentacin del bus de CC. El anillo SERCOS dej de estar activo despus de haber estado activo y en funcionamiento. Cable desconectado.
E38
SERCOSFault (Fallo de anillo SERCOS)
E39
DriveHardFault (Fallo de autodeteccin)
Error de conmutacin de autodeteccin al momento de la puesta en marcha
Se obstruy el movimiento requerido para la conmutacin de autodeteccin al momento de la puesta en marcha.
E43
DriveEnableInput Fault (Fallo de habilitacin del variador)
Seal de entrada de habilitacin del variador ausente
Se intent habilitar el eje por software mientras que la entrada de hardware de habilitacin de variador estaba inactiva. La entrada de habilitacin del variador cambi de activa a inactiva mientras que el eje estaba habilitado.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
83
Cdigo de error
Mensaje de fallo RSLogix (HIM)
Problema o sntoma
Causa potencial Cableado flojo en el conector SO. El cable/cabezal no est debidamente asentado en el conector SO. Circuito de desactivacin segura sin +24 VCC.
Posible resolucin Verifique las terminaciones del cable, las conexiones del cable/cabezal, y la conexin de +24 V. Borre el error y ejecute la prueba de comprobacin. Si el error persiste, devuelva el variador a Rockwell Automation. Verifique que a cada variador SERCOS se le haya asignado una direccin de nodo nica.
E49
DriveHardFault (Fallo de hardware de desactivacin segura)
Incoherencia en la funcin de desactivacin segura. El variador no permitir el movimiento.
E50
SERCOSFault (La misma direccin SERCOS) DriveHardFault (Fallo de hardware de retroalim.) DriveHardFault (Eje desconocido)
Se detect direccin de nodo duplicada en el anillo SERCOS.
E54
Se detect fallo de hardware de retroalimentacin de corriente.
Reemplace el mdulo.
E60
Se detectaron bits de ID ilegales
Reemplace el mdulo. Utilice cables blindados con pares trenzados. Encamine la retroalimentacin lejos de posibles fuentes de ruido. Compruebe las conexiones a tierra del sistema. Reemplace el motor/encoder. Verifique los conectores del cable de retroalimentacin del motor, y el cableado al IAM/AM y al motor. Verifique la conexin a tierra. Encamine el cable de retroalimentacin lejos de las fuentes de ruido. Consulte el documento System Design for Control of Electrical Noise Reference Manual, publicacin GMC-RM001. Revise el cableado de la alimentacin elctrica del motor/retroalimentacin. Consulte el mensaje en la pantalla para obtener informacin sobre la resolucin. Revise el cableado de la alimentacin elctrica del motor/retroalimentacin. Consulte el mensaje en la pantalla para obtener informacin sobre la resolucin. Ejecute la prueba Hookup en el software RSLogix 5000. Consulte la pantalla de ayuda de RSLogix 5000. Desconecte y vuelva a conectar la alimentacin elctrica. Si el fallo persiste, reemplace el mdulo. Revise las conexiones de DPI. Cargue los parmetros predeterminados, gurdelos en la memoria no voltil y desconecte y vuelva a conectar la alimentacin elctrica o restablezca el variador. Cargue los parmetros predeterminados, gurdelos en la memoria no voltil y desconecte y vuelva a conectar la alimentacin elctrica o restablezca el variador. Desconecte y vuelva a conectar la alimentacin elctrica. Si el fallo persiste, reemplace el mdulo.
E61
AuxFeedbackFault (AQB retroalim. aux.)
Error de estado del encoder auxiliar
El encoder auxiliar encontr una transicin ilegal.
E62
AuxFeedbackFault (Prdida de retroalim. aux.) AuxFeedbackNoise (Ruido en retroalim. aux.) MotorFeedbackNoise (Ruido en retroalim. del motor) No Fault Message (condicin indicada por mensaje en la pantalla) (Fallo de Hookup)
El cableado de retroalimentacin est abierto, en cortocircuito o ausente. Ruido en el cable de retroalimentacin auxiliar. Ruido en el cable de retroalimentacin del motor.
E63
E64
No se siguieron las pautas recomendadas de conexin a tierra en las instrucciones de instalacin.
E65
Fall el procedimiento Hookup
Funcionamiento incorrecto del motor o del dispositivo de retroalimentacin.
E66
No Fault Message (condicin indicada por mensaje en la pantalla) (Fallo de Atune)
Fall el procedimiento Autotune
Funcionamiento incorrecto del motor o del dispositivo de retroalimentacin.
E67
DriveHardFault (Inic. de tarea) DriveHardFault (Com. SCANport) DriveHardFault (Inic. de objetos)
Fall el sistema operativo
Se detect fallo de inicializacin de software debido a fallo de hardware. Dispositivo DPI o cable defectuoso.
E68
Fall la comunicacin DPI
E69
La memoria no voltil est contaminada debido a un fallo de hardware de la tarjeta de control.
E70
DriveHardFault (Inic. de mem. NV)
La memoria no voltil est contaminada debido a un error de software de la tarjeta de control.
E71
DriveHardFault (Inic. de memoria)
Fallo de validacin de la memoria RAM o Flash
Publicacin 2094-IN001H-ES-P Julio de 2006
84
Servovaridor multiejes Kinetix 6000
Cdigo de error
Mensaje de fallo RSLogix (HIM)
Problema o sntoma
Causa potencial Fall el ventilador del IAM o un AM
Posible resolucin Sustituya el mdulo con fallo. Compruebe la temperatura del gabinete. Cambie el perfil de comando para reducir la velocidad o aumentar el tiempo. Revise el flujo de aire y reencamine los cables lejos del sistema Kinetix 6000. Revise el mdulo para comprobar que est montado debidamente. Revise el riel de alimentacin elctrica y el mdulo para determinar si hay algn objeto extrao. Verifique que el tamao del motor sea apropiado. Revise/reemplace el dispositivo de transmisin. Revise/reemplace el motor. Verifique que el tamao del IAM sea apropiado. Instale un IAM con una clasificacin de kW mayor. Use una derivacin del tamao correcto o modifique el ciclo de trabajo de la aplicacin. El sistema usa derivacin interna y requiere derivacin externa para manejar capacidad adicional. Restablezca el sistema. Si el fallo persiste, reemplace el sistema. Reemplace el mdulo incoherente. Desconecte y vuelva a conectar la alimentacin elctrica. Si el fallo persiste, reemplace el mdulo.
E72
DriveOvertemp Fault (Sobretemperatura del variador)
La temperatura ambiente del gabinete est por encima del valor nominal. Se dispar el interruptor trmico del inversor El ciclo de trabajo de la mquina requiere una corriente eficaz (RMS) superior a la corriente continua nominal del controlador. El acceso de flujo de aire al sistema Kinetix 6000 est limitado u obstruido. Fallo de comunicaciones CAN del riel de alimentacin elctrica.
E73
Communicate (Com. del backplane)
Conexin del riel de alimentacin elctrica en cortocircuito o en circuito abierto.
E74
DriveOvercurrent Fault (Sobrecorriente del bus)
Funcionamiento incorrecto del motor o de la transmisin. La corriente del vnculo de CC excede la corriente nominal. Tamao incorrecto del IAM.
E75
DriveOvervoltage Fault (Tiempo de espera excedido de derivacin) DriveHardFault (Inic. de Can)
El IAM, AM o SM excedi la clasificacin de corriente continua de la resistencia de derivacin.
E76
Se detect fallo de inicializacin del hardware DPI.
Fallo de hardware de la tarjeta de control.
E77
Est instalado un AM de 230 V en el riel de alimentacin elctrica con DriveHardFault IAM de 460 V, o est instalado un AM de 460 V en el riel de alimentacin (Incoherencia de mdulos) elctrica con IAM de 230 V. DriveHardFault (Inic. de SERCOS) Se detect fallo de hardware de control. El LED de fallo por temperatura SM est de color rojo fijo.
E78
Consulte Indicador LED de fallo de temperatura en la pgina 87 Consulte Indicador LED de fallo de derivacin en la pgina 87 Instale el mdulo faltante en el riel de alimentacin elctrica. Llene la ranura vaca con un mdulo de tapa ciega. Reemplace el mdulo. Desconecte las conexiones de alimentacin de entrada de CA del IAM seguidor.
E79
DriveOvervoltage Fault (Fallo de mdulo de derivacin)
El LED de fallo de derivacin SM est de color rojo fijo.
Falta un mdulo en el riel de alimentacin elctrica.
E80 E81
DriveHardFault (Fallo de CPLD) DriveHardFault (Fallo de bus comn) DriveHardFault (Fallo por tiempo de espera excedido de precarga) RESERVADO
Se detect fallo de hardware de control. El IAM seguidor detect la conexin de alimentacin de entrada de CA.
E90 Todos los dems
La alimentacin de la resistencia de precarga excede la clasificacin de la resistencia.
Deje que la resistencia se enfre.
Llame al representante local de ventas de Rockwell Automation.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
85
Indicadores de estado de IAM/AM
Indicador LED de estado del variador
Indicador LED de estado del variador Apagado Rojo fijo Estado Normal, ningn fallo El variador presenta un fallo Causa potencial N/A El indicador LED de siete segmentos muestra un cdigo de error Posible resolucin N/A Consulte la seccin Cdigos de error y contine con la resolucin de problemas.
Indicador LED de estado de com.
Indicador LED de estado de com. Verde fijo Estado Comunicacin lista Causa potencial No hay fallos. El sistema todava est en el proceso de establecer la comunicacin SERCOS. La seleccin de direccin de nodo en el mdulo variador no coincide con la configuracin del controlador SERCOS. Conexin de fibra ptica floja. Apagado No hay comunicacin (1) Cable de fibra ptica roto. Cable del receptor de fibra ptica conectado al conector de transmisin SERCOS y viceversa.
(1)
Posible resolucin N/A Espere el estado del indicador LED verde fijo. Verifique que los ajustes del conmutador de nodo son los correctos. Verifique las correctas conexiones del cable de fibra ptica. Reemplace el cable de fibra ptica. Verifique las correctas conexiones del cable de fibra ptica SERCOS.
Verde parpadeante
Estableciendo comunicacin
Para obtener ms informacin, vea el documento Fiber Optic Cable Installation and Handling Instructions, publicacin 2090-IN010.
Indicador LED de estado del bus
Indicador LED de estado del bus Verde fijo Estado Alimentacin elctrica de bus presente; eje habilitado. No hay fallos ni desperfectos. Alimentacin elctrica de bus presente; eje inhabilitado. No hay fallos ni desperfectos. La alimentacin elctrica de bus no est presente. Desactivado Alimentacin elctrica de bus presente en el IAM seguidor. Condicin Normal cuando: Hay 24 V a la entrada de habilitacin de hardware (IOD-2). La instruccin MSO es comandada en el software RSLogix 5000. Normal cuando: No hay 24 V a la entrada de habilitacin de hardware (IOD-2). La instruccin MSO no es comandada en el software RSLogix 5000. Normal cuando la alimentacin elctrica de bus no est conectada. Existe un fallo, consulte el cdigo de error de siete segmentos y la seccin Interprete los indicadores de estado que comienza en la pgina 79. El IAM seguidor no est configurado como CommonBus Follow en el software RSLogix 5000. Despus de conectar el voltaje del bus de CC, es normal que ocurra un retardo de 2.5 segundos antes de que el indicador LED comience a parpadear de color verde como parte de la operacin normal, a fin de proporcionar al bus comn tiempo para completar la precarga.
Verde parpadeante
Publicacin 2094-IN001H-ES-P Julio de 2006
86
Servovaridor multiejes Kinetix 6000
Indicadores de estado SM
Cada uno de los indicadores LED del mdulo de derivacin proporciona informacin sobre resolucin de problemas, como se describe en Indicador LED de estado del bus, Indicador LED de fallo de temperatura y Indicador LED de fallo de derivacin.
Resolucin general de problemas del mdulo de derivacin
Mdulo Estado El fallo est enclavado. Bajo estas condiciones Hasta que se corrija y se elimine la condicin que produjo el fallo. Al usar los comandos de RSLogix MASR, MAFR, MGSR o el HIM (botn de paro rojo). SM Fallo borrado Slo despus de que el bus de CC est descargado (indicador LED de estado de bus SM parpadeando). El variador debe configurarse con el 2094-BSP2 o el mdulo de derivacin externo Boletn 1394. Cuando el mdulo de derivacin 2094-BSP2 se usa en un sistema de 230 V. Inhabilitado (para regulacin del bus de CC) IAM/AM Habilitado para descargar el bus de CC Inhabilitado de la descarga del bus de CC Cuando un sistema de 230 V o 460 V est configurado con un mdulo de derivacin externo Boletn 1394. Cuando est configurado en el modo seguidor de bus comn. Se desconect la alimentacin trifsica del variador (IAM o IAM lder). Cuando est configurado en el modo seguidor de bus comn.
IMPORTANTE
Bajo algunas condiciones de fallo, quizs se requieran dos comandos de restablecimiento para borrar los fallos del variador y SM.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
87
Indicador LED de estado del bus
Indicador LED de estado del bus Parpadeante Verde fijo Apagado Estado Causa potencial Posible resolucin N/A N/A Reemplace el mdulo de derivacin.
Condicin normal cuando la alimentacin de control est conectada y el voltaje del bus es menor de 60 VCC. Condicin normal cuando la alimentacin de control est conectada y el voltaje del bus es mayor de 60 VCC. La alimentacin de control no est presente Fallo de la fuente de alimentacin elctrica interna
Indicador LED de fallo de temperatura
Indicador LED de fallo de temp. Apagado Estado Condicin normal Fall el ventilador del mdulo de derivacin La temperatura interna del SM excede la especificacin de temperatura de operacin Rojo fijo El interruptor de temperatura externa est abierto. Causa potencial Posible resolucin N/A Reemplace el mdulo de derivacin. Deje que el mdulo de derivacin se enfre. Restablezca los fallos. Verifique la configuracin del regulador del bus del IAM. Deje que el mdulo de derivacin se enfre. Restablezca los fallos. Verifique la configuracin del regulador del bus del IAM. Instale el puente.
La temperatura del mdulo de derivacin excede la especificacin
Condicin de sobretemperatura externa
El puente TS no est presente
Indicador LED de fallo de derivacin
Indicador LED de fallo de derivacin Apagado Estado Condicin normal Resistencia de derivacin interna o externa en cortocircuito Puente de derivacin cableado incorrectamente u otro cortocircuito en el conector RC Cableado incorrecto de derivacin externa (en cortocircuito) Causa potencial Posible resolucin N/A Corrija la condicin de cableado incorrecto (cortocircuito). Si el problema persiste, reemplace el mdulo de derivacin.
Rojo fijo
Todos los indicadores LED de estado SM
Indicador LED de estado SM Estado del bus Fallo de temperatura Fallo de derivacin Estado Los tres indicadores LED de estado SM parpadean simultneamente Causa potencial Posible resolucin Desconecte y vuelva a conectar la alimentacin elctrica. Si el problema persiste, reemplace el mdulo de derivacin.
Fallo de hardware del mdulo de derivacin
Publicacin 2094-IN001H-ES-P Julio de 2006
88
Servovaridor multiejes Kinetix 6000
Resolucin de problemas generales del sistema
Condicin Causa potencial El dispositivo de retroalimentacin de posicin es incorrecto o est abierto. En modo de par inadvertidamente. Los lmites de ajuste del motor estn establecidos en valores muy altos. La ganancia del lazo de posicin o la tasa de aceleracin/ desaceleracin del controlador de posicin se estableci incorrectamente. Eje o sistema inestable. Tcnicas incorrectas de conexin a tierra o blindaje estn haciendo que se transmita ruido en las lneas de comando de velocidad o de retroalimentacin de posicin, lo cual ocasiona un movimiento errtico del eje. El lmite de seleccin del motor est establecido incorrectamente (el servomotor no corresponde con el mdulo de eje). Posible resolucin Revise el cableado. Verifique cul modo de operacin primario se program. Ejecute Tune en el software RSLogix 5000. Ejecute Tune en el software RSLogix 5000.
Revise el cableado y la conexin a tierra. Revise las configuraciones. Ejecute Tune en el software RSLogix 5000. Quizs se requiera un filtro de muesca o un filtro de salida (consulte el dilogo Axis Properties, ficha Output en el software RSLogix 5000). Verifique que los lmites de corriente estn establecidos correctamente. Seleccione el motor correcto y ejecute Tune nuevamente en el software RSLogix 5000. Compruebe el tamao del motor segn la necesidad de la aplicacin. Revise el tamao del servosistema. Compruebe el tamao del motor segn la necesidad de la aplicacin. Compruebe el tamao del motor segn la necesidad de la aplicacin. Revise el tamao del servosistema. Verifique los parmetros de lmite y corrjalos, segn sea necesario. Verifique los parmetros de lmite y corrjalos, segn sea necesario. Inhabilite el eje, espere 1.5 segundos y habilite el eje. Revise el controlador. Revise el cableado. Revise el cableado. Verifique si hay un fallo presente. Revise el cableado. Repare o reemplace el motor Verifique los aspectos mecnicos y haga las correcciones necesarias. Verifique y establezca correctamente el lmite. Verifique y establezca correctamente los lmites.
Resonancia mecnica
Los lmites de par estn establecidos en valores muy bajos. Se seleccion un motor incorrecto en la configuracin.
La inercia del sistema es excesiva. No puede obtener la aceleracin/desaceleracin del motor deseada.
El par de friccin del sistema es excesivo. La corriente disponible es insuficiente para suministrar la tasa de aceleracin/desaceleracin correcta. El lmite de aceleracin es incorrecto. Los lmites de velocidad son incorrectos. El eje no puede habilitarse durante 1.5 segundos despus de la inhabilitacin. La seal de habilitacin no se aplic o el cableado de habilitacin es incorrecto. El cableado del motor est abierto.
El motor no responde a un comando de velocidad.
Se dispar el interruptor trmico del motor. Mal funcionamiento del motor. Se rompi el acople entre el motor y la mquina (p. ej., el motor se mueve, pero la carga/mquina no). El modo de operacin primario se estableci incorrectamente. Los lmites de velocidad o corriente se establecieron incorrectamente.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
89
Condicin
Causa potencial
Posible resolucin Verifique la conexin a tierra. Encamine el cable lejos de las fuentes de ruido. Consulte el documento System Design for Control of Electrical Noise, publicacin GMC-RM001. Verifique la conexin a tierra. Encamine el cable lejos de las fuentes de ruido. Desacople el motor para verificacin. Verifique y mejore el rendimiento de la caja de engranajes, los tornillos de cabeza esfrica, etc. Inspeccione el cableado del motor y las conexiones. Extraiga las materias extraas. Verifique el tamao del servosistema. Enve el motor para su reparacin. Inspeccione el cableado del freno y su funcionamiento. Enve el motor para su reparacin. Revise el acople. Cambie el perfil de comando para reducir la aceleracin/desaceleracin o aumentar el tiempo. Enve el motor para su reparacin. Ejecute Tune nuevamente en el software RSLogix 5000. Extraiga las piezas flojas. Enve el motor para su reparacin. Reemplace el motor. Apriete los pernos. Enve el motor para su reparacin. Quizs se requiera un filtro de muesca (consulte el dilogo Axis Properties, ficha Output en el software RSLogix 5000). Inspeccione y corrija el cableado de alimentacin elctrica del motor. Inspeccione y corrija el cableado de retroalimentacin del motor. Inspeccione y corrija el cableado de retroalimentacin del motor.
No se siguieron las pautas recomendadas en las instrucciones de instalacin.
Presencia de ruido en los cables de seal de retroalimentacin del motor o de comando.
Puede que est presente la frecuencia de lnea. La frecuencia variable puede deberse a una fluctuacin de la retroalimentacin de velocidad o a una perturbacin causada por dientes de engranaje, tornillos de cabeza esfrica, etc. La frecuencia puede ser un mltiplo de los componentes de transmisin de potencia del motor o de las velocidades de los tornillos de cabeza esfrica que producen perturbaciones en la velocidad. Las conexiones del motor estn flojas o abiertas. Materias extraas depositadas en el motor. La carga del motor es excesiva.
No hay rotacin
Los cojinetes estn desgastados. El freno del motor est aplicado (si se suministr). El motor no est conectado a la carga. El ciclo de trabajo es excesivo. El rotor est parcialmente desmagnetizado lo cual causa una excesiva corriente del motor. Los lmites de ajuste del motor estn establecidos en valores muy altos. Hay piezas flojas presentes en el motor.
Sobrecalentamiento del motor
Ruido anormal Hay tornillos pasantes o un acople flojos. Los cojinetes estn desgastados. Resonancia mecnica Operacin errtica El motor se bloquea en posicin, funciona sin control o con par reducido. Fases U y V, U y W o V y W de alimentacin elctrica del motor invertidas. Conductores del rotor, seno o coseno estn invertidos en el conector del cable de retroalimentacin. Los conjuntos de conductores del rotor, seno, coseno de retroalimentacin del dispositivo de resolucin estn invertidos.
Publicacin 2094-IN001H-ES-P Julio de 2006
90
Servovaridor multiejes Kinetix 6000
Especificaciones
Esta seccin contiene especificaciones de la alimentacin elctrica y especificaciones generales del variador para los mdulos IAM, AM y SM.
Especificaciones de alimentacin elctrica del mdulo de eje integrado (convertidor)
Especificaciones de alimentacin elctrica del IAM (230 V)
Especificacin Voltaje de entrada de CA Frecuencia de entrada de CA Corriente de entrada de CA principal Nom. (rms) Corriente de entrada mx. al momento del arranque (0-pico) Voltaje de entrada de CC (seguidor de bus comn) Corriente de entrada de CC (seguidor de bus comn) Voltaje de entrada de CA de alimentacin de control Corriente de entrada de CA de alimentacin de control Nom. (a 220/230 VCA) rms Corriente de entrada mx. al momento del arranque (0-pico) Voltaje de salida de bus nominal Intervalo de autonoma tras interrupcin elctrica
(1)
Descripcin 2094-AC05-MP5-S 2094-AC05-M01-S 195...264 Vrms trifsico (230 V nom.) 47...63 Hz 10 A 20 A 275...375 VCC 10 A 95...264 V rms monofsico (230 V nom.) 19 A 36 A 71 A 19 A 33 A 36 A 65 A 71 A 120 A 2094-AC09-M02-S 2094-AC16-M03-S 2094-AC32-M05-S
6A 20 A 325 VCC 20 ms 19 A 38 A
6A 83 A (2)
Corriente de salida continua al bus (Adc) 10 A Corriente de salida intermitente al bus (Adc) (3) Sobrevoltaje del bus Voltaje insuficiente del bus Derivacin interna Potencia continua Potencia pico Resistencia de derivacin interna Derivacin activada Derivacin desactivada Salida de potencia continua al bus Salida de potencia pico Eficiencia Inductancia del convertidor Capacitancia del convertidor
(1)
36 A 72 A
71 A 142 A
20 A 425 VCC 138 VCC N/A N/A N/A N/A N/A 3 kW 6 kW 95% N/A 270 F
50 W 8,000 W 20 405 VCC 375 VCC 6 kW 12 kW
200 W 5,600 W 28.75
200 W 5,600 W 28.75
11.3 kW 22.6 kW 150 H
22.5 kW 45.0 kW 75 H 1,980 F
540 F
1,320 F
Todos los mdulos de eje integrado 2094-xCxx estn limitados a 2 ciclos de contactor por minuto (con 4 mdulos de eje como mximo) o 1 ciclo de contactor por minuto (con 5 a 8 mdulos de eje). La mxima duracin de la corriente de entrada al momento del arranque es 1/2 ciclo de lnea. La duracin de la corriente de salida intermitente es 250 ms.
(2) (3)
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
91
Especificaciones de alimentacin elctrica del IAM (460 V)
Especificacin Voltaje de entrada de CA Frecuencia de entrada de CA Corriente de entrada de CA principal Nom. (rms) Corriente de entrada mx. al momento del arranque (0-pico) Voltaje de entrada de CC (seguidor de bus comn) Corriente de entrada de CC (seguidor de bus comn) Voltaje de entrada de CA de alimentacin de control Corriente de entrada de CA de alimentacin de control Nom. (a 220/230 VCA) rms Corriente de entrada mx. al momento del arranque (0-pico) Voltaje de salida de bus nominal Intervalo de autonoma tras interrupcin elctrica Corriente de salida continua al bus (Adc) Corriente de salida intermitente al bus (Adc) (2) Sobrevoltaje del bus Voltaje insuficiente del bus Derivacin interna Potencia continua Potencia pico Resistencia de derivacin interna Derivacin activada Derivacin desactivada Salida de potencia continua al bus Salida de potencia pico Eficiencia Inductancia del convertidor Capacitancia del convertidor
(1)
Descripcin 2094-BC01-MP5-S 2094-BC01-M01-S 324...528 V rms trifsico (360...480 V nom.) 47...63 Hz
(1)
2094-BC02-M02-S
2094-BC04-M03-S
2094-BC07-M05-S
10 A 10 A 458...747 VCC 10 A 95...264 V rms monofsico (230 V nom.)
24 A 20 A
44 A 34 A
71 A 56 A
24 A
43 A
71 A
6A 25 A 650 VCC 20 ms 10 A 20 A 825 VCC 275 VCC 50 W 5,600 W 115 805 VCC 755 VCC 6 kW 12 kW 95% 250 H 110 F 220 F 125 H 940 F 75 H 1,410 F 15 kW 30 kW 27.6 kW 55.2 kW 45 kW 90 kW 200 W 22,300 W 28.75 24 A 48 A 43 A 86 A 71 A 142 A
Todos los mdulos de eje integrado 2094-xCxx estn limitados a 2 ciclos de contactor por minuto (con 4 mdulos de eje como mximo) o 1 ciclo de contactor por minuto (con 5 a 8 mdulos de eje). La duracin de la corriente de salida intermitente es de 250 ms.
(2)
Publicacin 2094-IN001H-ES-P Julio de 2006
92
Servovaridor multiejes Kinetix 6000
Especificaciones de alimentacin elctrica del mdulo de eje (inversor)
Las siguientes tablas listan las especificaciones de alimentacin elctrica de los mdulos de ejes Kinetix 6000. Las especificaciones corresponden al mdulo de eje especificado en el encabezamiento de la columna por nmero de catlogo, y el mismo mdulo de eje (seccin inversor) que reside dentro de un mdulo de eje integrado.
Especificaciones de alimentacin elctrica del AM (inversor) de 230 V
Descripcin Especificacin Ancho de banda (1) Lazo de velocidad Lazo de corriente Frecuencia PWM Voltaje nominal de entrada Corriente continua (rms) Corriente continua (0-pico) Corriente pico (rms) (2) Corriente pico (0-pico)
(2)
2094-AMP5-S 2094-AM01-S (2094-AC05-MP5-S) (2094-AC05-M01-S) 500 Hz 1,300 Hz 8 kHz 325 VCC 3.7 A 5.2 A 7.4 A 10.5 A 1.2 kW 6.0 A 8.5 A 12.0 A 17.0 A 1.9 kW
2094-AM02-S (2094-AC09-M02-S)
2094-AM03-S (2094-AC16-M03-S)
2094-AM05-S (2094-AC32-M05-S)
4 kHz
10.6 A 15.0 A 21.2 A 30.0 A 3.4 kW
17.3 A 24.5 A 34.6 A 48.9 A 5.5 kW
34.6 A 48.9 A 51.9 A 73.4 A 11.0 kW
Salida de potencia continua (nom.) Derivacin interna Potencia continua Potencia pico Resistencia de derivacin interna Derivacin activada Derivacin desactivada Eficiencia Capacitancia Absorcin de energa capacitiva
(1) (2)
N/A N/A N/A N/A N/A 98% 390 F 15 J 660 F 25 J 780 F 29 J
50 W 1,400 W 115 405 VCC 375 VCC 1,320 F 50 J 2,640 F 99 J
Los valores de ancho de banda varan segn los parmetros de ajuste y los componentes mecnicos. La duracin de la corriente pico es de 2.5 segundos.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
93
Especificaciones de alimentacin elctrica del AM (inversor) de 460 V
Descripcin Especificacin Ancho de banda (1) Lazo de velocidad Lazo de corriente Frecuencia PWM Voltaje nominal de entrada Corriente continua (rms) Corriente continua (seno) 0-pico Corriente pico (rms) (2) Corriente pico (0-pico) (2) Salida de potencia continua (nom.) Derivacin interna Potencia continua Potencia pico Resistencia de derivacin interna Derivacin activada Derivacin desactivada Eficiencia Capacitancia Absorcin de energa capacitiva
(1) (2)
2094-BMP5-S 2094-BM01-S (2094-BC01-MP5-S) (2094-BC01-M01-S) 500 Hz 1,300 Hz 8 kHz 650 VCC 2.8 A 4.0 A 4.2 A 5.9 A 1.8 kW 6.1 A 8.6 A 9.2 A 12.9 A 3.9 kW
2094-BM02-S (2094-BC02-M02-S)
2094-BM03-S (2094-BC04-M03-S)
2094-BM05-S (2094-BC07-M05-S)
4 kHz
10.3 A 14.6 A 15.5 A 21.8 A 6.6 kW
21.2 A 30.0 A 31.8 A 45.0 A 13.5 kW
34.6 A 48.9 A 51.9 A 73.4 A 22.0 kW
50 W 5,600 W 115 805 VCC 755 VCC 97% 75 F 10 J 150 F 19 J 270 F 35 J
200 W 22,300 W 28.75
840 F 108 J
1,175 F 152 J
Los valores de ancho de banda varan segn los parmetros de ajuste y los componentes mecnicos. La duracin de la corriente pico es de 2.5 segundos.
Especificaciones de alimentacin del mdulo de derivacin
Nmero de catlogo de mdulo de derivacin Especificaciones Voltaje del variador VCA 230 2094-BSP2 460 28.75 Resistencia Potencia pico kW 5.7 22.5 Corriente pico A 14 28 200 Potencia continua W Fusible de repuesto
Variadores Kinetix 6000
2094-ACxx-Mxx-S o 2094-BCxx-Mxx-S
N/A (sin fusible interno)
Para obtener las especificaciones y dimensiones de los mdulos de derivacin externa pasiva compatibles con el mdulo de derivacin 2094, consulte el documento Kinetix Motion Control Selection Guide, publicacin GMC-SG001.
Publicacin 2094-IN001H-ES-P Julio de 2006
94
Servovaridor multiejes Kinetix 6000
Especificaciones de disipacin de potencia
Use la siguiente tabla para dimensionar un envolvente y calcular la ventilacin requerida para el sistema de variador Kinetix 6000.
Uso como % de la salida de potencia nominal (watts) 20% Mdulo de eje integrado (convertidor IAM) (1) 2094-AC05-MP5-S 2094-AC05-M01-S 2094-AC09-M02-S 2094-AC16-M03-S 2094-AC32-M05-S 2094-BC01-MP5-S 2094-BC01-M01-S 2094-BC02-M02-S 2094-BC04-M03-S 2094-BC07-M05-S 19 33 18 31 15 20 22 44 23 51 38 64 20 30 43 77 27 69 60 102 25 40 65 111 31 87 83 144 30 50 86 144 35 105 108 190 35 60 108 177 40% 60% 80% 100%
Mdulos Kinetix 6000
Mdulo de eje integrado (inversor IAM) o mdulo de eje (AM) (1) 2094-AC05-MP5-S o -AMP5-S 2094-AC05-M01-S o -AM01-S 2094-AC09-M02-S o -AM02-S 2094-AC16-M03-S o -AM03-S 2094-AC32-M05-S o -AM05-S 2094-BC01-MP5-S o -BMP5-S 2094-BC01-M01-S o -BM01-S 2094-BC02-M02-S o -BM02-S 2094-BC04-M03-S o -BM03-S 2094-BC07-M05-S o -BM05-S Mdulo de derivacin (SM) 2094-BSP2
(1)
60 62 64 50 106 75.7 95 98 95 118
65 69 73 72 160 80.9 120 126 132 182
70 76 82 99 220 86 145 154 171 251
75 83 91 130 285 92 170 182 212 326
80 90 100 165 356 98 195 210 256 406
68
121
174
227
280
La potencia de derivacin interna no se incluye en los clculos y debe aadirse segn la utilizacin.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
95
Especificaciones del disyuntor/fusible
Use fusibles clase CC, J, L o R, con la clasificacin de corriente indicada en la tabla siguiente. Se recomiendan los siguientes ejemplos de fusibles y disyuntores Allen-Bradley para uso con los mdulos de eje integrados (2094-xCxx-Mxx-S) cuando no se usa el modulo de interface de lnea (LIM).
IMPORTANTE
Los mdulos de interface de lnea (2094-ALxxS, -BLxxS y -XL75S-Cx) proporcionan proteccin de circuito derivado al IAM. Siga todos los cdigos NEC y cdigos locales aplicables.
Especificaciones de fusibles
Voltaje de alimentacin de entrada de CA Nmero de catlogo 2094-AC05-MP5-S 2094-AC05-M01-S Fusible Bussmann Disyuntor Allen-Bradley (1) 140M-F8E-C16 140M-F8E-C20 140U-H6C3-C50 140U-H6C3-C90 140M-F8E-C32 140M-F8E-C45 140U-H6C3-C50 140U-H6C3-C90 1492-CB2H060 FNQ-R-10 (10 A) 1492-SP2D200 Alimentacin de entrada de control Fusible Bussmann Disyuntor Allen-Bradley (1) Fusible de bus comn de CC Fusible Bussmann N/A FWH-35B FWH-60B FWH-125B N/A FWJ-40A FWJ-70A FWJ-125A Fusible Ferraz Shawmut A50P20-1 A50P35-4 A50P60-4 A50P125-4 A100P20-1 A100P40-1 A100P70-1 A100P125-1
KTK-R-20 (20 A) 1492-CB3H300
1492-CB2H060
2094-AC09-M02-S KTK-R-30 (30 A) 1492-CB3H400 2094-AC16-M03-S LPJ-45SP (45 A) N/A 2094-AC32-M05-S LPJ-80SP (80 A) N/A 2094-BC01-MP5-S 2094-BC01-M01-S 2094-BC02-M02-S 2094-BC04-M03-S 2094-BC07-M05-S
(1)
KTK-R-20 (20 A) 1492-CB3H300 KTK-R-30 (30 A) 1492-CB3H400 LPJ-45SP (45 A) LPJ-80SP (80 A) N/A
Cuando se usan dispositivos de proteccin de circuito Boletn 1492, la mxima corriente de cortocircuito disponible de la fuente est limitada a 5000 A.
Transformador de entrada para alimentacin elctrica de control
Se puede emplear cualquier transformador para uso general con las siguientes clasificaciones.
Atributo Volt-amperes de entrada Voltaje de entrada Voltaje de salida Valor (sistema de 460 V) 750 VA 460 VCA 120...240 VCA
Publicacin 2094-IN001H-ES-P Julio de 2006
96
Servovaridor multiejes Kinetix 6000
Clasificaciones de contactores
La siguiente tabla indica las clasificaciones de contactores recomendadas para los mdulos de eje integrados que se instalan sin mdulo de interface de lnea.
Nmero de catlogo Contactor de IAM de 230 V 2094-AC05-MP5-S 2094-AC05-M01-S 2094-AC09-M02-S 2094-AC16-M03-S 2094-AC32-M05-S 100-C23x10 (bobina de CA) 100-C23Zx10 (bobina de CC) 100-C37x10 (bobina de CA) 100-C37Zx10 (bobina de CC) 100-C72x10 (bobina de CA) 100-C72Zx10 (bobina de CC) 100-C85x10 (bobina de CA) 100-C85Zx10 (bobina de CC) Nmero de catlogo Contactor de IAM de 460 V 2094-BC01-MP5-S 2094-BC01-M01-S 2094-BC02-M02-S 2094-BC04-M03-S 2094-BC07-M05-S 100-C23x10 (bobina de CA) 100-C23Zx10 (bobina de CC) 100-C37x10 (bobina de CA) 100-C37Zx10 (bobina de CC) 100-C60x10 (bobina de CA) 100-C60Zx10 (bobina de CC) 100-C72x10 (bobina de CA) 100-C72Zx10 (bobina de CC)
Mximas longitudes del cable de retroalimentacin
Si bien los cables de retroalimentacin del motor estn disponibles en longitudes estndar de hasta 90 m (295.3 pies), la combinacin de variador/motor/retroalimentacin puede limitar la mxima longitud del cable, como se muestra en las tablas siguientes. Estas tablas suponen el uso de los cables serie 2090 recomendados.
Motores serie MP (MPL y MPG)
Motores MPL-A (230 V) Alta resolucin absoluta (1) m (pies) 30 (98.4)
(1) (2) (3) (4)
Motores MPL-B (460 V) Alta resolucin absoluta (1) m (pies) 90 (295.3) Incremental (2) m (pies) 30 (98.4) Dispositivo de resolucin (3) m (pies) 90 (295.3)
Motores MPG-A (230 V) Alta resolucin absoluta (4) m (pies) 30 (98.4)
Motores MPG-B (460 V) Alta resolucin absoluta (4) m (pies) 60 (196.8)
Incremental (2) m (pies) 30 (98.4)
Se refiere a motores de baja inercia MPL-A/BxxxS/M (una vuelta o mltiples vueltas) con retroalimentacin de alta resolucin absoluta. Se refiere a motores de baja inercia MPL-A/BxxxH con retroalimentacin incremental de 2000 lneas. Se refiere a motores de baja inercia MPL-A/BxxxR con retroalimentacin de dispositivo de resolucin de 2 polos. Se refiere a motores de engranaje integrado MPG-A/BxxxS/M (una vuelta o mltiples vueltas) con retroalimentacin de alta resolucin absoluta.
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
97
Motores serie MP (MPF y MPS), 1326AB y series TL-, F-, H-, N- e Y
Motores MPF-A y MPS-A (230 V) Alta resolucin absoluta (1) (2) m (pies) 30 (98.4)
(1)
Motores MPF-B y MPS-B (460 V) Alta resolucin absoluta (1) (2) m (pies) 90 (295.3)
Motores 1326AB (M2L/S2L) (460 V) Alta resolucin absoluta (3) m (pies) 90 (295.3)
Motores 1326AB (460 V) Dispositivo de resolucin (4) m (pies) 90 (295.3)
Motores series F, H, NoY (230 V) Incremental (5) m (pies) 30 (98.4)
Motores serie TL (230 V) Incremental (6) m (pies) 30 (98.4)
Se refiere a motores aptos para la industria alimenticia MPF-A/BxxxxS/M (una vuelta o mltiples vueltas) con retroalimentacin de alta resolucin absoluta. Se refiere a motores de acero inoxidable MPS-A/BxxxxS/M (una vuelta o mltiples vueltas) con retroalimentacin de alta resolucin absoluta. Se refiere a los motores 1326AB-Bxxxx-M2L/S2L (una vuelta o mltiples vueltas) con retroalimentacin de alta resolucin absoluta. Se refiere a los motores 1326AB-Bxxxx-21 con retroalimentacin de dispositivo de resolucin Se refiere a motores serie F, H, N o Y con retroalimentacin incremental (encoder ptico). Se refiere a motores de baja inercia TL-Axxxx-H con retroalimentacin integral
(2) (3) (4) (5) (6)
Especificaciones de peso
Mdulo Kinetix 6000 Nmero de catlogo 2094-AC05-MP5-S 2094-AC05-M01-S IAM (230 V) 2094-AC09-M02-S 2094-AC16-M03-S 2094-AC32-M05-S 2094-AMP5-S 2094-AM01-S AM (230 V) 2094-AM02-S 2094-AM03-S 2094-AM05-S 2094-PRS1 2094-PRS2 2094-PRS3 Rieles de alimentacin elctrica (delgados) 2094-PRS4 2094-PRS5 2094-PRS6 2094-PRS7 2094-PRS8 Valor aprox. kg (lb) 2.23 (4.9) 2.27 (5.0) 2.31 (5.1) 4.71 (10.4) 7.43 (16.4) 1.46 (3.2) 1.50 (3.3) 1.54 (3.4) 3.13 (6.9) 3.18 (7.0) 1.05 (2.3) 1.59 (3.5) 2.14 (4.7) 2.67 (5.9) 3.11 (6.8) 3.55 (7.8) 3.99 (8.8) 4.43 (9.7) SM (460 V) Mdulo de tapa ciega 2094-BSP2 2094-PRF 3.10 (6.8) 0.45 (1.0) Rieles de alimentacin elctrica AM (460 V) IAM (460 V) Mdulo Kinetix 6000 Nmero de catlogo 2094-BC01-MP5-S 2094-BC01-M01-S 2094-BC02-M02-S 2094-BC04-M03-S 2094-BC07-M05-S 2094-BMP5-S 2094-BM01-S 2094-BM02-S 2094-BM03-S 2094-BM05-S 2094-PR1 2094-PR2 2094-PR4 2094-PR6 2094-PR8 Valor aprox. kg (lb) 4.98 (11.0) 5.03 (11.1) 5.08 (11.2) 9.60 (21.1) 10.1 (22.3) 2.44 (5.4) 2.49 (5.5) 2.54 (5.6) 4.58 (10.1) 4.98 (11.0) 1.04 (2.3) 1.41 (3.1) 2.18 (4.8) 2.90 (6.4) 3.63 (8.0)
Publicacin 2094-IN001H-ES-P Julio de 2006
98
Servovaridor multiejes Kinetix 6000
Especificaciones ambientales
Especificacin Temperatura ambiente Humedad relativa Altitud Vibracin Choque Rango de funcionamiento 0...50 C (32...122 F) 5...95% sin condensacin 1000 m (3281 pies) 0.152 mm (0.006 pulg.) de desplazamiento pico a pico (mx.), 1.0 g de aceleracin pico (mx.) a 5...2000 Hz Impulsos semisinusoidales de 15 g por 11 ms (3 impulsos en cada una de tres direcciones mutuamente perpendiculares) Rango de almacenamiento (fuera de funcionamiento) 40...70 C (40...158 F) 5...95% sin condensacin 3000 m (9843 pies) durante el transporte 0.381 mm (0.015 pulg.) de desplazamiento pico a pico (mx.), 2.5 g de aceleracin pico (mx.) a 5...2000 Hz Impulsos semisinusoidales de 30 g por 11 ms (3 impulsos en cada una de tres direcciones mutuamente perpendiculares)
Certificaciones
Certificacin (1) (cuando el producto incorpora el distintivo) c-UL-us
Estndares En lista de UL segn estndares de seguridad de EE.UU. y canadienses (UL 508 C Archivo E59272). Directiva de la Unin Europea 89/336/EEC sobre compatibilidad electromagntica (EMC) de conformidad con EN 61800-3:2004: Sistemas variadores de potencia elctrica de velocidad ajustable, Parte 3: Estndar sobre compatibilidad electromagntica (EMC) de productos, incluidos los mtodos de prueba especficos.
CE
Directiva de la Unin Europea 73/23/EEC EMC sobre bajo voltaje, de conformidad con: EN 60204-1:1997 Seguridad de maquinaria Equipo elctrico de mquinas. EN 50178:1997 Equipo Electrnico para uso en instalaciones de potencia. EN 60204-1:1997 Seguridad de maquinaria Equipo elctrico de mquinas.
Seguridad funcional
IEC 61508: Parte 1-7:2000 Seguridad funcional de sistemas elctricos/ electrnicos/electrnicos/programables relacionados con la seguridad. EN954-1:1996 Seguridad de maquinaria. Piezas relacionadas con la seguridad de sistemas de control. Parte 1: Principios generales de diseo.
(1)
Consulte http://www.rockwellautomation.com/products/certification para obtener informacin sobre los certificados de
Publicacin 2094-IN001H-ES-P Julio de 2006
Servovaridor multiejes Kinetix 6000
99
Recursos adicionales
Para
Los documentos que se indican a continuacin incluyen informacin adicional sobre productos de Allen-Bradley relacionados.
Consulte este documento Kinetix 6000 User Manual Kinetix Safe-off Feature Safety Reference Manual Kinetix 6000 Power Rail Installation Instructions 2094 Mounting Bracket Installation Instructions Line Interface Module Installation Instructions Kinetix Motion Control Selection Guide Motion Analyzer CD, v4.2 o posterior Sitio web de configuracin y seleccin de herramientas de Rockwell Automation Motion Modules in Logix5000 Control Systems User Manual SoftLogix Motion Card Setup and Configuration Manual Resistive Brake Module Installation Instructions Fiber-Optic Cable Installation and Handling Instructions System Design for Control of Electrical Noise Reference Manual EMC Noise Management DVD Understanding the Machinery Directive Visite el sitio web de certificaciones de productos de Rockwell Automation Nmero de catlogo 2094-UM001 GMC-RM002 2094-IN003 2094-IN008 2094-IN005 GMC-SG001 PST-SG003 http://www.ab.com/ e-tools LOGIX-UM002 1784-UM003 2090-IN009 2090-IN010 GMC-RM001 GMC-SP001 SHB-900 http:// www.rockwellautomation. com/certification/ce/docs Publicado por la Asociacin Nacional de Proteccin contra Incendios de EE.UU. (NPFA), con sede en Boston, Massachusetts, EE.UU. AG-7.1
Informacin sobre instalacin, configuracin, resolucin de problemas y aplicaciones del variador Kinetix 6000 Informacin sobre cableado, resolucin de problemas y aplicaciones del variador de seguridad Kinetix 6000 Informacin sobre instalacin del riel de alimentacin elctrica Boletn 2094 Informacin sobre instalacin de los soportes de montaje Boletn 2094 Informacin sobre instalacin y resolucin de problemas del mdulo de interface de lnea (LIM) Boletn 2094 Una descripcin y especificaciones de la familia de variadores 2094, incluidos el LIM, RBM y los servomotores compatibles Dimensionamiento de variadores y motores con software de anlisis de aplicacin Seleccin de productos y herramientas de configuracin del sistema en lnea, incluidos planos en Autocad (DXF) Informacin sobre configuracin y resolucin de problemas del sistema ControlLogix y los mdulos CompactLogix SERCOS interface Informacin sobre configuracin y resolucin de problemas de la tarjeta SoftLogix PCI Informacin sobre instalacin y resolucin de problemas del mdulo de freno resistivo (RBM) Boletn 2090 Informacin sobre la correcta manipulacin, instalacin, prueba y resolucin de problemas de los cables de fibra ptica Informacin, ejemplos y tcnicas diseadas para minimizar los fallos del sistema causados por ruido elctrico Un resumen del significado del distintivo CE y aplicaciones de productos de control relacionados con la seguridad Para obtener las declaraciones de conformidad (DoC) actualmente disponibles a travs de Rockwell Automation
Un artculo sobre los calibres y tipos de cables para conexin a tierra del equipo elctrico
Cdigo elctrico nacional de EE.UU. (National Electrical Code)
Un glosario de trminos y abreviaturas de automatizacin industrial
Rockwell Automation Industrial Automation Glossary
Puede ver o descargar publicaciones en http://literature.rockwellautomation.com. Para pedir copias impresas de documentacin tcnica, comunquese con el distribuidor o representante local de ventas de Rockwell Automation.
Publicacin 2094-IN001H-ES-P Julio de 2006
Soporte Tcnico de Rockwell Automation
Rockwell Automation ofrece informacin tcnica en la Web para ayudarle a utilizar sus productos. En http://support.rockwellautomation.com, encontrar manuales tcnicos, una base de conocimientos con preguntas frecuentes, notas tcnicas y de aplicacin, ejemplos de cdigos y vnculos a Service Packs de software, adems la facilidad MySupport que puede personalizar para aprovechar al mximo las herramientas. Con el fin de brindarle un nivel adicional de soporte tcnico para la instalacin, configuracin y resolucin de problemas por telfono, ofrecemos los programas de soporte tcnico TechConnect Support. Para obtener ms informacin, pngase en contacto con el distribuidor o representante de Rockwell Automation ms cercano, o visite la pgina http://support.rockwellautomation.com.
Asistencia para la instalacin
Si se le presenta un problema con un mdulo de hardware durante las 24 horas posteriores a la instalacin, revise la informacin proporcionada en este manual. Tambin puede ponerse en contacto con el nmero telefnico de Soporte Tcnico al Cliente, donde le brindarn la ayuda inicial necesaria para instalar y poner en funcionamiento el mdulo: En Estados Unidos Fuera de Estados Unidos 1.440.646.3223 Lunes a viernes, de 8 a.m. a 5 p.m. (hora oficial del Este) Comunquese con el representante local de Rockwell Automation para cualquier cuestin relativa al soporte tcnico.
Devolucin de productos nuevos
Rockwell prueba todos sus productos para comprobar que funcionan correctamente al momento de enviarlos desde las instalaciones de fabricacin. Sin embargo, si el producto no funciona y fuera necesario devolverlo: En Estados Unidos Pngase en contacto con el distribuidor. Deber proporcionar al distribuidor un nmero de caso del soporte tcnico (llame al nmero de telfono indicado anteriormente para obtenerlo) a fin de completar el proceso de devolucin. Pngase en contacto con el representante local de Rockwell Automation para obtener informacin sobre el procedimiento de devolucin.
Fuera de Estados Unidos
Publicacin 2094-IN001H-ES-P Julio de 2006 Mes 2006 100
Sustituye la publicacin 2094-IN001G-ES-P Septiembre de 2005 Mes Ao
PN 313665-P08
Copyright 2006 Rockwell Automation, Inc. Todos los derechos reservados. Impreso en EE.UU.
You might also like
- Kinetix 350 - Es-P PDFDocument156 pagesKinetix 350 - Es-P PDFSergio Pretell Villa100% (1)
- Kinetix 6000 Codigos de ErrorDocument5 pagesKinetix 6000 Codigos de ErrorVictorNo ratings yet
- Manual Prático PLC GE (Proficy Machine)Document32 pagesManual Prático PLC GE (Proficy Machine)arrudaed100% (1)
- Basic Drive Programing PF755 RevD ESDocument31 pagesBasic Drive Programing PF755 RevD ESbsalas890% (1)
- Generadores de vacío OVEMDocument10 pagesGeneradores de vacío OVEMDiego Garcia LopezNo ratings yet
- RSLogix 500 Micrologix 1000 comunicaciónDocument4 pagesRSLogix 500 Micrologix 1000 comunicaciónMarco Martinez SantiagoNo ratings yet
- Kinetix 350Document168 pagesKinetix 350Joel GaucinNo ratings yet
- Sysmac Studio: Introducción a la plataforma SysmacDocument226 pagesSysmac Studio: Introducción a la plataforma SysmacAlejandro Espinosa100% (1)
- Entorno de Step 7Document712 pagesEntorno de Step 7Fernando David Siles NatesNo ratings yet
- S7-1200 HSC encoder contador rápidoDocument15 pagesS7-1200 HSC encoder contador rápidoSantiago VillacresNo ratings yet
- Profinet Robot ABB S7 1200Document6 pagesProfinet Robot ABB S7 1200Jose Antonio MercadoNo ratings yet
- TwinCat ProgrammingDocument24 pagesTwinCat ProgrammingMark ViquezNo ratings yet
- Brochure Simatic-Step7 Tia-Portal EsDocument24 pagesBrochure Simatic-Step7 Tia-Portal EsraiNo ratings yet
- Ayuda PLCDocument509 pagesAyuda PLCBryan Julian AlbarracinNo ratings yet
- Comunicacion ModbusTCP MicroLogix 1400 Serie BDocument4 pagesComunicacion ModbusTCP MicroLogix 1400 Serie BOcellum DuriNo ratings yet
- Studio 5000 - InfoPLCDocument4 pagesStudio 5000 - InfoPLCHenry RodriguezNo ratings yet
- Basico PF 755Document31 pagesBasico PF 755Ronald Suriaga AuthemanNo ratings yet
- Comunicación Opc Con Softlogix e IgnitionDocument21 pagesComunicación Opc Con Softlogix e IgnitionjeidamasaNo ratings yet
- FORD - GuardLogix PDFDocument137 pagesFORD - GuardLogix PDFtavobeto7No ratings yet
- Altivar 312Document6 pagesAltivar 312Carlos Avila MiguelNo ratings yet
- Manual UFMSP NC - V4Document115 pagesManual UFMSP NC - V4gorrilunNo ratings yet
- Manual Del Operador: Unidad MecánicaDocument230 pagesManual Del Operador: Unidad Mecánicabatiste alandeteNo ratings yet
- Fanuc KukaDocument250 pagesFanuc KukaClecio de PaulaNo ratings yet
- 1794 In019 - Es P PDFDocument12 pages1794 In019 - Es P PDFJonNo ratings yet
- 1783-Um004 - Stratix 5700Document248 pages1783-Um004 - Stratix 5700Hanks EpphNo ratings yet
- Manual FNUC EspañolDocument69 pagesManual FNUC EspañolFranNo ratings yet
- Periferia Kuka KR2Document21 pagesPeriferia Kuka KR2Jorge MatitoNo ratings yet
- Serratron 110Document70 pagesSerratron 110marazjoseNo ratings yet
- Manual SlateDocument47 pagesManual SlateJose LozoyaNo ratings yet
- Um1209401 Es PDFDocument0 pagesUm1209401 Es PDFCarreño GutiérrezNo ratings yet
- Webinar Sinumerik One PDFDocument67 pagesWebinar Sinumerik One PDFDaniel RGNo ratings yet
- Tia Portal BasicDocument20 pagesTia Portal Basicluiz Avelar100% (1)
- B-81685ES - 02 - LRM 200ibDocument226 pagesB-81685ES - 02 - LRM 200ibManuel Gil BotiaNo ratings yet
- Manual de Usuario ABB (Reparado)Document30 pagesManual de Usuario ABB (Reparado)ELVIS AGUILAR HUERTANo ratings yet
- Si MotionDocument77 pagesSi MotionAdarleen Arevalo ValleNo ratings yet
- DDS Hardware ManualDocument420 pagesDDS Hardware ManualRafael RodriguezNo ratings yet
- TSX Micro Pl7v1 2Document23 pagesTSX Micro Pl7v1 2eddieipenzaNo ratings yet
- Fanuc: RoboticsDocument254 pagesFanuc: RoboticsvulduovlakNo ratings yet
- Proyecto de Programación Robots Fanuc 2000ibDocument120 pagesProyecto de Programación Robots Fanuc 2000ibOmarNo ratings yet
- Guía de Instalación Siemens Tecnomatix: Septiembre, 2022Document22 pagesGuía de Instalación Siemens Tecnomatix: Septiembre, 2022Ruperto GonzalezNo ratings yet
- Procedimiento - ProfiNET - Fanuc Board - R30iBPlus - SINGLEDocument24 pagesProcedimiento - ProfiNET - Fanuc Board - R30iBPlus - SINGLEasdasd100% (1)
- 1756 rm095 - Es P PDFDocument670 pages1756 rm095 - Es P PDFDaniel Pérez50% (2)
- Fsu DX200Document158 pagesFsu DX200emmanuel baezNo ratings yet
- Manual Operador RobotstudioDocument638 pagesManual Operador RobotstudiotorkuaNo ratings yet
- FactoryTalk® VantagePoint (4469)Document3 pagesFactoryTalk® VantagePoint (4469)PEdro CarvajalNo ratings yet
- M GX Works2 A Es XXXXXXDocument110 pagesM GX Works2 A Es XXXXXXgersain arandaNo ratings yet
- CAP.4 Cx-Programmer - PLC OmronDocument78 pagesCAP.4 Cx-Programmer - PLC OmronFreddy TorresNo ratings yet
- Indradrive MLD EspañolDocument172 pagesIndradrive MLD Españolenriqueacm19No ratings yet
- ST 80 2010 EspañolDocument716 pagesST 80 2010 EspañolOk AdNo ratings yet
- Tema 1-IEC 61131Document68 pagesTema 1-IEC 61131angelpi91No ratings yet
- Configuración AS-i con PLC S7-300 y esclavos AS-iDocument10 pagesConfiguración AS-i con PLC S7-300 y esclavos AS-iRonald VilcaNo ratings yet
- PLC PDFDocument27 pagesPLC PDFFelipe Arjona MartínezNo ratings yet
- Procedimiento para Preconfigurar Robots de Soldadura Fanuc v.ACDocument32 pagesProcedimiento para Preconfigurar Robots de Soldadura Fanuc v.ACJose Guillermo vazquez reyesNo ratings yet
- Manual de Usuario Micro 830 - 850Document262 pagesManual de Usuario Micro 830 - 850Rodrigo Alvaro Centellas Azero100% (2)
- m116 Ca00catalo1 - Es PDocument370 pagesm116 Ca00catalo1 - Es PJose TorresNo ratings yet
- Servovariadores Multiejes Kinetix 6000: Manual Del UsuarioDocument294 pagesServovariadores Multiejes Kinetix 6000: Manual Del UsuarioPablo León CanalesNo ratings yet
- 2094 Um002 - Es PDocument298 pages2094 Um002 - Es PShecko BicusNo ratings yet
- 2094 Um001 - Es PDocument288 pages2094 Um001 - Es PDiana Itzel Velazquez EspinosaNo ratings yet
- Conectividad On-Machine: Catálogos de ProductosDocument370 pagesConectividad On-Machine: Catálogos de ProductosGabriel JaimeNo ratings yet
- Curso de Kinetix - Control de Ejes AgregadosDocument220 pagesCurso de Kinetix - Control de Ejes AgregadosEdgar manjarrezNo ratings yet
- Seguridad Vial en Vias No PavimentadasDocument1 pageSeguridad Vial en Vias No PavimentadasCesar Nizama GarciaNo ratings yet
- Los 5 Primeros Libros de VitrubioDocument41 pagesLos 5 Primeros Libros de VitrubioDaniela VillaNo ratings yet
- Presupuesto Estructuras Hosp - TarapotoDocument4 pagesPresupuesto Estructuras Hosp - TarapotoDiegoCastilloNo ratings yet
- 02 Padrón de Empresas 2019-10Document570 pages02 Padrón de Empresas 2019-10Angie EspinozaNo ratings yet
- Corona - RT-46-160 - Sin - Reenvio PDFDocument96 pagesCorona - RT-46-160 - Sin - Reenvio PDFjackNo ratings yet
- Cálculo de Entalpías MolaresDocument51 pagesCálculo de Entalpías MolaresNelson Estela ValenzuelaNo ratings yet
- Guía Práctica 3 (Resuelta), M. Fluidos IDocument6 pagesGuía Práctica 3 (Resuelta), M. Fluidos Ilolo100% (1)
- MATERIAL IV Semana 4 Diseño de EscaleraDocument8 pagesMATERIAL IV Semana 4 Diseño de EscalerasoledadNo ratings yet
- Hoja Membretada Ing. Ivan CcayasccaDocument2 pagesHoja Membretada Ing. Ivan CcayasccaYordan BohorquezNo ratings yet
- Sellos y RetenesDocument31 pagesSellos y RetenesAngela PacsiNo ratings yet
- Tp2 g11 Sis. Constructivo PrefabricadosDocument38 pagesTp2 g11 Sis. Constructivo Prefabricadoskikex floresNo ratings yet
- Yeso en Cielo Raso - CompressDocument14 pagesYeso en Cielo Raso - CompressDaNo ratings yet
- Origen de la termodinámica: calor y fuerzaDocument5 pagesOrigen de la termodinámica: calor y fuerzaEliana Ocampo BNo ratings yet
- Ejercicio GlobalDocument17 pagesEjercicio GlobalSidney GuerreroNo ratings yet
- Practica N3Document2 pagesPractica N3Michael Juan Inga BrunoNo ratings yet
- DensidadDocument2 pagesDensidadIsrael Luizaga Montero67% (6)
- Construccion DL Ponton KM 1217+000 y Accesos Volumen VI PDFDocument88 pagesConstruccion DL Ponton KM 1217+000 y Accesos Volumen VI PDFTeresa Rivera VilchezNo ratings yet
- Leapfrog Geo 4.0 Release Notes ESDocument16 pagesLeapfrog Geo 4.0 Release Notes ESJavier SequeirosNo ratings yet
- Ficha Tecnica de Lana IsotermDocument2 pagesFicha Tecnica de Lana IsotermFares WanuzNo ratings yet
- Modos Ventilatorios No Convencionales FinalDocument29 pagesModos Ventilatorios No Convencionales FinalYOshie Parras0% (1)
- EPP-Producción-TarimasDocument2 pagesEPP-Producción-TarimasHenry ReyesNo ratings yet
- Manual de Operación de PozosDocument52 pagesManual de Operación de PozosHECTOR CARLIN100% (2)
- PIC - PE-EHS-28 - Check List de EstrobosDocument2 pagesPIC - PE-EHS-28 - Check List de EstrobosLuchoo L SCNo ratings yet
- Impacto Ambiental de Las Centrales TermoeléctricasDocument16 pagesImpacto Ambiental de Las Centrales TermoeléctricasOsvaldo Antonio Flores CruzNo ratings yet
- Preguntas y Respuestas para Examen E1-06Document13 pagesPreguntas y Respuestas para Examen E1-06Neftali Landero TorresNo ratings yet
- QuesoDocument698 pagesQuesoMiriam AcNo ratings yet
- Diagrama Transversal Diagrama Longitudinal: Datos Técnicos Xlpe Cu 4/0 Awg 15Kv 133% PC PVC SR EcuDocument1 pageDiagrama Transversal Diagrama Longitudinal: Datos Técnicos Xlpe Cu 4/0 Awg 15Kv 133% PC PVC SR EcudoryNo ratings yet
- Vitruvio y los 10 libros de arquitecturaDocument22 pagesVitruvio y los 10 libros de arquitecturaMaiteCeballos100% (4)
- QUIMICADocument1 pageQUIMICASandra Milena Yañez JimenezNo ratings yet
- Código Asme, Sección Ix, Parte QW en Español.2013Document233 pagesCódigo Asme, Sección Ix, Parte QW en Español.2013Edgar Becerra Alvarado100% (2)