You might also like
- Secrets in NumbersDocument26 pagesSecrets in Numbersmdkafzal100% (5)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- String Harmonics in Ravel's Orchestral WorksDocument97 pagesString Harmonics in Ravel's Orchestral WorksYork R83% (6)
- Barrons High Frequency Words With Syn & AntonymsDocument48 pagesBarrons High Frequency Words With Syn & Antonymsbharatluvs100% (4)
- PZO9401 Second Darkness Players Guide PDFDocument36 pagesPZO9401 Second Darkness Players Guide PDFAllan ChuaNo ratings yet
- DC/DC Converter Operation GuideDocument6 pagesDC/DC Converter Operation GuidesaeidraminaNo ratings yet
- PID Temp. ControllerDocument8 pagesPID Temp. ControllerHowardgfNo ratings yet
- Temperature Controller: User'S ManualDocument32 pagesTemperature Controller: User'S ManualkmpoulosNo ratings yet
- O The Beat 1 - TBDocument164 pagesO The Beat 1 - TBJulliana SantosNo ratings yet
- 4ps QuestionnaireDocument3 pages4ps QuestionnaireFlorante De Leon67% (3)
- Syl 2372Document8 pagesSyl 2372Ismael 8877No ratings yet
- Auber Instruments PID Temperature Controller ManualDocument5 pagesAuber Instruments PID Temperature Controller ManualEektor BonillaNo ratings yet
- Syl 151Document4 pagesSyl 151Boris KozjanNo ratings yet
- Syl-1512A2 Pid Temperature Controller Instruction Manual Instruction ManualDocument5 pagesSyl-1512A2 Pid Temperature Controller Instruction Manual Instruction ManualTony GaryNo ratings yet
- Electronic RelaysDocument21 pagesElectronic Relayslopablito24No ratings yet
- Im PK 1603Document32 pagesIm PK 1603James James MorrisonNo ratings yet
- The Sussex VT1: As Interpreted by Les Carpenter G4CNHDocument27 pagesThe Sussex VT1: As Interpreted by Les Carpenter G4CNHrogerio pessanha dos santosNo ratings yet
- .J N I - .J N - P U1 0 S : 0Document15 pages.J N I - .J N - P U1 0 S : 0Montse TovarNo ratings yet
- MTB Oi 4-12Document19 pagesMTB Oi 4-12JerNo ratings yet
- SYL-2342 ManualDocument8 pagesSYL-2342 ManualAbu SaifNo ratings yet
- H1000e I Ema-Emc PDFDocument4 pagesH1000e I Ema-Emc PDFNguyen Van ChungNo ratings yet
- Lg42pc5dh Ul Chassis Pa75cDocument38 pagesLg42pc5dh Ul Chassis Pa75cdann222No ratings yet
- DTB ManualDocument13 pagesDTB ManualJorge BurbanoNo ratings yet
- LD-B10-10 Temperature Controller User GuideDocument22 pagesLD-B10-10 Temperature Controller User GuideFareh KhanNo ratings yet
- Lock Out Relay PDFDocument10 pagesLock Out Relay PDFshaikhsajid242No ratings yet
- SG808 ManualDocument2 pagesSG808 ManualzzmeoneNo ratings yet
- Telemecanique PDFDocument60 pagesTelemecanique PDFMario PerezNo ratings yet
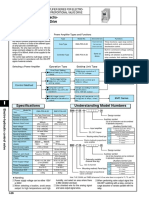
- N121-132A Servocontroller Power Supply SpecsDocument6 pagesN121-132A Servocontroller Power Supply Specsnm2007kNo ratings yet
- LM2852 Synchronous BuckDocument14 pagesLM2852 Synchronous BuckAndrew CavanaughNo ratings yet
- Universal 16 Amp Self Excited Automatic Voltage Regulator ManualDocument9 pagesUniversal 16 Amp Self Excited Automatic Voltage Regulator ManualJuan José Tovar Pérez100% (1)
- LG TV 29fu6rsd (RS) Chassis Cw62d, Service ManualDocument22 pagesLG TV 29fu6rsd (RS) Chassis Cw62d, Service Manualjazjcl3269No ratings yet
- LM45B LM45C SOT-23 Precision Centigrade Temperature SensorsDocument9 pagesLM45B LM45C SOT-23 Precision Centigrade Temperature SensorsTuấn ThiệnNo ratings yet
- Design Ideas - 6598372 - 555 Timer Drives 7 LEDsDocument5 pagesDesign Ideas - 6598372 - 555 Timer Drives 7 LEDsTony ClelandNo ratings yet
- Op - Tc544a - Tc244ax - Tc344ax - Dtc204a-2 - Dtc324a-2 - Op294-V05 - 04-07-13Document3 pagesOp - Tc544a - Tc244ax - Tc344ax - Dtc204a-2 - Dtc324a-2 - Op294-V05 - 04-07-13Raja VeluNo ratings yet
- Product Features: Control ModeDocument6 pagesProduct Features: Control ModeYudha J MalmsteenNo ratings yet
- Triple Power SupplyDocument2 pagesTriple Power SupplymankylyNo ratings yet
- 7XV5662!2!5AD10 Manual Ziehl TR600 enDocument10 pages7XV5662!2!5AD10 Manual Ziehl TR600 enEddy Fernando Queca CadizNo ratings yet
- 48 50a-3wDocument28 pages48 50a-3wtecairNo ratings yet
- TV LG Plasma 42PB4DA Manual de ServicioDocument42 pagesTV LG Plasma 42PB4DA Manual de Servicioteack09100% (1)
- Varlogic NRC12Document56 pagesVarlogic NRC12ViverSharinganUchihaNo ratings yet
- TC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General DescriptionDocument6 pagesTC620 TC621 5V, Dual Trip Point Temperature Sensors: Features General Descriptionmiki983No ratings yet
- Dual Half Bridge Driver: Multipower BCD TechnologyDocument9 pagesDual Half Bridge Driver: Multipower BCD TechnologyDan EsentherNo ratings yet
- Syy155415 CPDocument3 pagesSyy155415 CPdanutzugheNo ratings yet
- BM2596Document9 pagesBM2596Anton AdrianNo ratings yet
- Advanced Monolithic Systems: Rohs CompliantDocument8 pagesAdvanced Monolithic Systems: Rohs CompliantWilliam BlackNo ratings yet
- LM2585Document32 pagesLM2585Anonymous uBxUcNd58No ratings yet
- Abb Combiflex Stator Earth Fault RelayDocument2 pagesAbb Combiflex Stator Earth Fault RelayumeshbhamidiNo ratings yet
- XP2-R Power and Reverse Power RelayDocument14 pagesXP2-R Power and Reverse Power RelayRam RKNo ratings yet
- DTA Manual UsuarioDocument12 pagesDTA Manual Usuario99lea99No ratings yet
- Electronic Pressure Switch & Transmitter: General SpecificationDocument4 pagesElectronic Pressure Switch & Transmitter: General Specificationhuu thanh nguyenNo ratings yet
- DAC0808 8-Bit D/A Converter: Literature Number: SNAS539ADocument14 pagesDAC0808 8-Bit D/A Converter: Literature Number: SNAS539AomNo ratings yet
- RTD Module PDFDocument4 pagesRTD Module PDFbuianhtuan1980No ratings yet
- Description: Eagle Quantum Premier Agent Release Module EQ2500ARMDocument2 pagesDescription: Eagle Quantum Premier Agent Release Module EQ2500ARMFernando Zambrano San Martín0% (1)
- Ucc3580 4Document20 pagesUcc3580 4vanhuong87No ratings yet
- 150KHz, 3A Step Down Voltage Switching Regulators DatasheetDocument10 pages150KHz, 3A Step Down Voltage Switching Regulators DatasheetAlfredo Valencia RodriguezNo ratings yet
- LM334Document26 pagesLM3342567daNo ratings yet
- Coleman RV 12 Volt Thermistat ACDocument18 pagesColeman RV 12 Volt Thermistat ACsthoma20100% (1)
- Automatic Temperature Controller Using Lm35Document18 pagesAutomatic Temperature Controller Using Lm35siddhantgurung4171% (14)
- SCR w5 enDocument10 pagesSCR w5 enAji Beni LastomoNo ratings yet
- IC Regulated Power Supply TutorialDocument8 pagesIC Regulated Power Supply TutorialGugun GunawanNo ratings yet
- TMP 35 GDocument16 pagesTMP 35 GWeslley FariaNo ratings yet
- Adr 132 BDocument5 pagesAdr 132 Btandin tshewangNo ratings yet
- Datasheet lm3914Document29 pagesDatasheet lm3914antonioNo ratings yet
- 50 Important Quotes You Should Pay Attention To in Past The Shallows Art of Smart EducationDocument12 pages50 Important Quotes You Should Pay Attention To in Past The Shallows Art of Smart EducationSailesh VeluriNo ratings yet
- Toan Bo Cac Bai Ktra E11CBDocument13 pagesToan Bo Cac Bai Ktra E11CBNguyễn Thị Huyền Phương0% (1)
- VC3 TranslationDocument313 pagesVC3 TranslationFuyuki Maxwell ArashiNo ratings yet
- Physics: PAPER 1 Multiple ChoiceDocument20 pagesPhysics: PAPER 1 Multiple Choicelulz.l.n.sNo ratings yet
- Progressivism Lesson 3 The PresidentsDocument3 pagesProgressivism Lesson 3 The Presidentsapi-302923213No ratings yet
- Kamala Das Poetry CollectionDocument0 pagesKamala Das Poetry CollectionBasa SwaminathanNo ratings yet
- Edith Bonomi CV SummaryDocument1 pageEdith Bonomi CV SummaryEdithNo ratings yet
- Frawley David - Wisdom of The Ancient Seers Mantras of The Rig VedaDocument140 pagesFrawley David - Wisdom of The Ancient Seers Mantras of The Rig Vedadbbircs100% (1)
- Mathematical Language and Symbols ExplainedDocument5 pagesMathematical Language and Symbols Explainedcyra6flores6verderaNo ratings yet
- MKTG10001Document38 pagesMKTG10001Jessica KokNo ratings yet
- Balay Dako Menu DigitalDocument27 pagesBalay Dako Menu DigitalCarlo -No ratings yet
- 11th Commerce Mathematics and Statistics Part II Maharashtra BoardDocument10 pages11th Commerce Mathematics and Statistics Part II Maharashtra BoardTanmay Gholap100% (3)
- Engineering Properties of Soil PDFDocument55 pagesEngineering Properties of Soil PDFJam Apizara Chaizalee100% (1)
- SLI ProfileThe title "TITLE SLI Profile" is less than 40 characters and starts with "TITLEDocument3 pagesSLI ProfileThe title "TITLE SLI Profile" is less than 40 characters and starts with "TITLEcringeNo ratings yet
- Crane's Manual - CV ValuesDocument14 pagesCrane's Manual - CV Valuesnghiemta18No ratings yet
- Aircrew Standards Manual FY2015 V1Document211 pagesAircrew Standards Manual FY2015 V1Anonymous Pb39klJ100% (1)
- Chapter 16-Analyzing Qualitative DataDocument3 pagesChapter 16-Analyzing Qualitative DataLiko Pah TuafNo ratings yet
- Irish Chapter 6 Causes of DeathDocument8 pagesIrish Chapter 6 Causes of DeathIrish AlonzoNo ratings yet
- History of English - IntroductionDocument58 pagesHistory of English - IntroductionPaul Edward GuevarraNo ratings yet
- Community-Acquired Pneumoniaandhospital-Acquiredpneumonia: Charles W. Lanks,, Ali I. Musani,, David W. HsiaDocument15 pagesCommunity-Acquired Pneumoniaandhospital-Acquiredpneumonia: Charles W. Lanks,, Ali I. Musani,, David W. HsiaMajo EscobarNo ratings yet
- Ra 6770Document8 pagesRa 6770Jamiah Obillo HulipasNo ratings yet
- SAP Training Program Proposal for StudentsDocument2 pagesSAP Training Program Proposal for StudentsAjay KumarNo ratings yet
- Discourse and PragmaticsDocument10 pagesDiscourse and PragmaticsDebby NatasyaNo ratings yet
- MC Data Dig Graphic Organizer 1Document5 pagesMC Data Dig Graphic Organizer 1api-461486414No ratings yet