You might also like
- Pid ScadaDocument13 pagesPid ScadaDarwin GarciaNo ratings yet
- Control AdoresDocument83 pagesControl AdoresMani RodriguezNo ratings yet
- Control Adaptativo Con Arduino Uno PDFDocument70 pagesControl Adaptativo Con Arduino Uno PDFEduardo PerezNo ratings yet
- AUTOMATISMODocument68 pagesAUTOMATISMOJean Carlos Huerta DiazNo ratings yet
- Calibracion de Valvula de Volumen Compresor VilterDocument1 pageCalibracion de Valvula de Volumen Compresor Vilterlizeth mahechaNo ratings yet
- Allen BradleyDocument89 pagesAllen BradleyCilBricenioNo ratings yet
- Entradas y Salidas de Un PLCDocument6 pagesEntradas y Salidas de Un PLCJosue DomínguezNo ratings yet
- Reles para Control y Bornes SchneiderDocument48 pagesReles para Control y Bornes SchneiderDavid Jose Poma Guillen100% (1)
- Satellite U55-ASP5301SL Spec SP Rev 2Document4 pagesSatellite U55-ASP5301SL Spec SP Rev 2Alicia ChumpitazNo ratings yet
- Entradas y Salidas de Un PLC PDFDocument13 pagesEntradas y Salidas de Un PLC PDFKcho AnteloNo ratings yet
- Control Adaptivo Por Modelo de Referencia (Mrac) para Una Planta de Segundo OrdenDocument30 pagesControl Adaptivo Por Modelo de Referencia (Mrac) para Una Planta de Segundo Ordencss_unac100% (1)
- InteliCompact NT Operator Guide 01 2012 ES PDFDocument14 pagesInteliCompact NT Operator Guide 01 2012 ES PDFMaxiSanchezNo ratings yet
- Variadores de Frecuencia - OpDocument18 pagesVariadores de Frecuencia - OpRafael LimnNo ratings yet
- MicroTech III For Air-Cooled Scroll Chiller and Heat Pump - OM - D-EOMHP00607-14ES-Tcm478-337547Document79 pagesMicroTech III For Air-Cooled Scroll Chiller and Heat Pump - OM - D-EOMHP00607-14ES-Tcm478-337547luillioNo ratings yet
- Las Partes de Un Monitor LCDDocument6 pagesLas Partes de Un Monitor LCDperrero20No ratings yet
- Presentación Placa Electrónica Equipo Todo NadaDocument34 pagesPresentación Placa Electrónica Equipo Todo Nadamonica cuevas100% (1)
- Practica SCRDocument6 pagesPractica SCRAlf Toys PilaresNo ratings yet
- Lab 12 - RS485Document10 pagesLab 12 - RS485LuzNo ratings yet
- Servomotores Eléctricos PDFDocument17 pagesServomotores Eléctricos PDFbrianj010% (1)
- Relé ElectromecánicoDocument13 pagesRelé ElectromecánicoAnonymous nWQAEQWhNo ratings yet
- Senales Análogas y DigitalesDocument6 pagesSenales Análogas y DigitalesSalomme Alvarez CabreraNo ratings yet
- Descripcion de Las Tarjetas ElectronicasDocument23 pagesDescripcion de Las Tarjetas ElectronicasRamón Gorgorita100% (1)
- Handbook - Manual de Operacion Panel Wizard 2.1Document1 pageHandbook - Manual de Operacion Panel Wizard 2.1Alejandra Toro VelasquezNo ratings yet
- InyectoraDocument196 pagesInyectoraHenry Manzano TonatoNo ratings yet
- Mesin Cuci Kesalahan Samsung® EU Tidak Berputar - Bagaimana Cara MemperbaikinyaDocument37 pagesMesin Cuci Kesalahan Samsung® EU Tidak Berputar - Bagaimana Cara MemperbaikinyaJoy F Joy M0% (1)
- SGE-M-ET-001 Manual Arranacador PE START VO2 160108Document22 pagesSGE-M-ET-001 Manual Arranacador PE START VO2 160108CRISTIAN DAVID OROYA INFANTESNo ratings yet
- Manual BDAS01Document132 pagesManual BDAS01Harold ParedesNo ratings yet
- Control DC Basado en Matlab PDFDocument16 pagesControl DC Basado en Matlab PDFNoe Muñoz QuitoNo ratings yet
- 15 Software en Ingenieria ElectricaDocument8 pages15 Software en Ingenieria ElectricaPaul Rodriguez100% (1)
- Practica PIDDocument13 pagesPractica PIDMartín SilvestreNo ratings yet
- Modbus Con Plc's s7 1200 - OkDocument52 pagesModbus Con Plc's s7 1200 - OkErik Mora100% (1)
- Ejercicios de Automatizacion IndustrialDocument11 pagesEjercicios de Automatizacion IndustrialSarah Chumbile Calle0% (1)
- PLC s7-1200Document26 pagesPLC s7-1200Ramos CornelioNo ratings yet
- Control de Transferencia PDFDocument2 pagesControl de Transferencia PDFDidier Javier Moreno ParraNo ratings yet
- Electronica IIDocument611 pagesElectronica IIhmvhmv100% (1)
- Autotronics Spa MecatronichuDocument32 pagesAutotronics Spa MecatronichuRonald ÂþâzâNo ratings yet
- Interfaces de Entrada y Salida de Un PLCDocument26 pagesInterfaces de Entrada y Salida de Un PLCGãtx JâčkNo ratings yet
- Aire de PresicionDocument12 pagesAire de Presicionjhoel rimapaNo ratings yet
- PCD2Document285 pagesPCD2Lizz ShigureNo ratings yet
- Selector de Materiales y ColoresDocument7 pagesSelector de Materiales y ColoresMario Alejandro Altamirano EspinozaNo ratings yet
- Ejercicios S7 1200 - para AIDocument5 pagesEjercicios S7 1200 - para AIPérez De la Fuente José DavidNo ratings yet
- Reparación de ECUS y MódulosDocument2 pagesReparación de ECUS y MódulosEDSONNo ratings yet
- Fuente Conmutada AtxDocument18 pagesFuente Conmutada AtxRaul NiñoNo ratings yet
- Uso de Concept 2.6XL (2013)Document36 pagesUso de Concept 2.6XL (2013)Julio MaitaNo ratings yet
- Dossier Tec - LavadorasDocument8 pagesDossier Tec - LavadorasLuis Miguel Nuñez CastroNo ratings yet
- ECU Fallas y Soluciones Equipo GDocument5 pagesECU Fallas y Soluciones Equipo GCesar el tunasNo ratings yet
- Curso Manual de Programación PLC IzumiDocument77 pagesCurso Manual de Programación PLC Izumimadenicola10100% (4)
- Dispositivos de Control Electrónico Parcial 2Document25 pagesDispositivos de Control Electrónico Parcial 2Jaime Arellano HuertaNo ratings yet
- Solucion Actividad 2Document7 pagesSolucion Actividad 2D'Alejandro Quiroga96% (24)
- Manual de PLCDocument21 pagesManual de PLCVinicio OjedaNo ratings yet
- Sensores de ProximidadDocument4 pagesSensores de ProximidadCristobal RuizNo ratings yet
- Control de Motores Paso A Paso Por El Puerto Paralelo Del PCDocument5 pagesControl de Motores Paso A Paso Por El Puerto Paralelo Del PCanarkia54100% (2)
- Como Probar Un Circuito Integrado para Saber Si Está Abierto en Corto o en FugaDocument3 pagesComo Probar Un Circuito Integrado para Saber Si Está Abierto en Corto o en FugaAxel BCNo ratings yet
- Wa0045Document60 pagesWa0045Edilberto MJNo ratings yet
- Control de Velocidad de Motores - SchneiderDocument19 pagesControl de Velocidad de Motores - SchneiderclausNo ratings yet
- Teoria de Control y RoboticaDocument11 pagesTeoria de Control y RoboticaAlejandro Fernandez LeonNo ratings yet
- Proporcional Integral Derivativo Intro 9Document2 pagesProporcional Integral Derivativo Intro 9Víctor VillegasNo ratings yet
- Controladores PidDocument30 pagesControladores PidCarlos Eduardo Peña Rodriguez100% (2)
- Controlador PidDocument5 pagesControlador PidWilliam JHNo ratings yet
- Control PidDocument11 pagesControl PidLuisAlfredoPerezNo ratings yet
- Product BacklogDocument1 pageProduct Backlogedson molinaNo ratings yet
- Caso A FacturarDocument4 pagesCaso A FacturarWalter castillo anguloNo ratings yet
- La Lengua y Sus VariedadesDocument5 pagesLa Lengua y Sus VariedadesPeachmi MCNo ratings yet
- Tabla de Especifícaciones de ReactivosDocument3 pagesTabla de Especifícaciones de ReactivosEventos BonvivantNo ratings yet
- Kandy Frescia Cambio ApellidoDocument6 pagesKandy Frescia Cambio Apellidowalter gomez tamayoNo ratings yet
- 12edith LitwinDocument3 pages12edith LitwinMaria Marcela MenardNo ratings yet
- Estadistica 2Document4 pagesEstadistica 2Noel QuirozNo ratings yet
- Plan de NegocioDocument13 pagesPlan de NegocioJaime Pelaez100% (1)
- Hoja de Actividades de 2º ESO (Pendientes 1 NDocument3 pagesHoja de Actividades de 2º ESO (Pendientes 1 NJuanjo100% (1)
- Tema 14.la Improvisación en El Lenguaje MusicalDocument26 pagesTema 14.la Improvisación en El Lenguaje MusicalMarta FernándezNo ratings yet
- Empresa de ChocolateDocument25 pagesEmpresa de ChocolateSaira Arely Tobar MoralesNo ratings yet
- BARRENADODocument7 pagesBARRENADODavid PichogagónNo ratings yet
- Cómo Se Pagan Las Vacaciones No Disfrutadas en MéxicoDocument6 pagesCómo Se Pagan Las Vacaciones No Disfrutadas en MéxicoAnne GaleanaNo ratings yet
- 06.03 Instalaciones SanitariasDocument9 pages06.03 Instalaciones SanitariasCarlos Alberto Gago CuevaNo ratings yet
- X4394 esCL 4210 SegTransPlate 121917Document4 pagesX4394 esCL 4210 SegTransPlate 121917Sebastian QuintanaNo ratings yet
- Diapositivas Accodc AyshmDocument41 pagesDiapositivas Accodc AyshmRogger JAckNo ratings yet
- Viii Experiencia de Aprendizaje - Act 3 - 1 y 2 GradoDocument5 pagesViii Experiencia de Aprendizaje - Act 3 - 1 y 2 GradoHeber ApazaNo ratings yet
- P-Ssoma-03-Fam - Mantenimiento de Subestacion Biposte Nº10Document2 pagesP-Ssoma-03-Fam - Mantenimiento de Subestacion Biposte Nº10Gaby Rivera MezaNo ratings yet
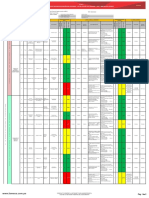
- Actividad 2 Matriz Regulacion Toxicologica y Agentes ToxicosDocument16 pagesActividad 2 Matriz Regulacion Toxicologica y Agentes ToxicosDANY ALEJANDRO POLO RAMIREZNo ratings yet
- Caso - Plantilla Analisis de Estados Financieros RIMAC Seguros y ReasegurosDocument47 pagesCaso - Plantilla Analisis de Estados Financieros RIMAC Seguros y ReasegurosJensen Roy Quispe SuárezNo ratings yet
- Musica A Finales Del XIX y Principios Del XXDocument3 pagesMusica A Finales Del XIX y Principios Del XXasdfghjklkjhgfdsNo ratings yet
- Mem. Descrip. Carretera1Document28 pagesMem. Descrip. Carretera1Nathaly Sandra ChoqueNo ratings yet
- Análisis de Variables Macroeconómicas de Chile Durante Los Años 2001-2021Document25 pagesAnálisis de Variables Macroeconómicas de Chile Durante Los Años 2001-2021ADRIANA YNÉS FERNANDEZ CHAVEZNo ratings yet
- A2 Nomina (Modo de Compatibilidad)Document6 pagesA2 Nomina (Modo de Compatibilidad)Alberto AvilaNo ratings yet
- Ejercicios Placa BaseDocument5 pagesEjercicios Placa BaseJugador FelizNo ratings yet
- Plantas Utiles de BailadoresDocument27 pagesPlantas Utiles de Bailadoresveliger2009No ratings yet
- Padilla, Miguel M. S/ Inconstitucionalidad Del Art. 2 de La Ley 23.298 (2001)Document2 pagesPadilla, Miguel M. S/ Inconstitucionalidad Del Art. 2 de La Ley 23.298 (2001)Facundo Martin ChiuffoNo ratings yet
- AchicoriaDocument14 pagesAchicoriaCesarCumbreraNo ratings yet
- FPJ 14 EntrevistaDocument4 pagesFPJ 14 EntrevistaStephy Yuliet Marulanda VargasNo ratings yet
- 2 - Ejercicios Intervalos, Armaduras, Rítmicos PDFDocument2 pages2 - Ejercicios Intervalos, Armaduras, Rítmicos PDFTeto PianourquizaNo ratings yet