You might also like
- Observer-Based Adaptive Fuzzy Control For SISO Nonlinear Systems Via BacksteppingDocument5 pagesObserver-Based Adaptive Fuzzy Control For SISO Nonlinear Systems Via BacksteppingZellagui EnergyNo ratings yet
- Neural Networks For Control - 01Document5 pagesNeural Networks For Control - 01Lissete VergaraNo ratings yet
- Energy Based Control of The PendubotDocument5 pagesEnergy Based Control of The Pendubotneiljohn2009No ratings yet
- Uncoupled PID Control of Coupled Multi-Agent Nonlinear Uncertain SystemsDocument18 pagesUncoupled PID Control of Coupled Multi-Agent Nonlinear Uncertain SystemsMarcos MatosNo ratings yet
- NN Distillation ColumnDocument5 pagesNN Distillation ColumnguillermocochaNo ratings yet
- Fuzzy Adaptive H Control For A Class of Nonlinear SystemsDocument6 pagesFuzzy Adaptive H Control For A Class of Nonlinear SystemsnguyenquangduocNo ratings yet
- 1980 - Global Stability of Parameter-Adaptive Control SystemsDocument7 pages1980 - Global Stability of Parameter-Adaptive Control SystemsademargcjuniorNo ratings yet
- Designing Mixed Structure Specified Controllers Using Particle Swarm Optimization (PSO) AlgorithmDocument6 pagesDesigning Mixed Structure Specified Controllers Using Particle Swarm Optimization (PSO) AlgorithmAyman YounisNo ratings yet
- Fault Detection Based On Observer For Nonlinear Dynamic Power SystemDocument8 pagesFault Detection Based On Observer For Nonlinear Dynamic Power SystemAbdulazeez Ayomide AdebimpeNo ratings yet
- An Lmi Approach For Designing Sliding Mode ObserversDocument6 pagesAn Lmi Approach For Designing Sliding Mode Observerst123medNo ratings yet
- Passivity-Based Output Synchronization of Networked Euler-Lagrange Systems Subject To Nonholonomic ConstraintsDocument6 pagesPassivity-Based Output Synchronization of Networked Euler-Lagrange Systems Subject To Nonholonomic ConstraintsSumeet SatputeNo ratings yet
- Using Dynamic Neural Networks To Generate Chaos: An Inverse Optimal Control ApproachDocument7 pagesUsing Dynamic Neural Networks To Generate Chaos: An Inverse Optimal Control ApproachmxjoeNo ratings yet
- A High-Gain Observer-Based PD ControlDocument5 pagesA High-Gain Observer-Based PD ControlbilynbkNo ratings yet
- XTP23 151 Paperstampedno PDFDocument6 pagesXTP23 151 Paperstampedno PDFUsef UsefiNo ratings yet
- Other ApplicationsDocument78 pagesOther Applications叶远虑No ratings yet
- Numerical Methods and Software For Sensitivity Analysis of Differential-Algebraic SystemsDocument23 pagesNumerical Methods and Software For Sensitivity Analysis of Differential-Algebraic SystemsFCNo ratings yet
- Robust Adaptive Controller For Uncertain Nonlinear SystemsDocument10 pagesRobust Adaptive Controller For Uncertain Nonlinear SystemsijitcajournalNo ratings yet
- Synchronization of Fractional Chaotic Systems Via Fractional-Order Adaptive ControllerDocument5 pagesSynchronization of Fractional Chaotic Systems Via Fractional-Order Adaptive ControllermusheermusheerNo ratings yet
- Approximate Controllability of Semi-Linear Fuzzy Dynamical SystemDocument5 pagesApproximate Controllability of Semi-Linear Fuzzy Dynamical SystemEditor IJRITCCNo ratings yet
- A Fuzzy Back Propagation AlgorithmDocument13 pagesA Fuzzy Back Propagation AlgorithmTung DangNo ratings yet
- Trajectory Tracking Error Using PID Control Law For A 2 DOF Helicopter Model Via Adaptive Time-Delay Neural NetworksDocument7 pagesTrajectory Tracking Error Using PID Control Law For A 2 DOF Helicopter Model Via Adaptive Time-Delay Neural Networkspeanuts22No ratings yet
- Sung2011 Article RobustObserver-basedFuzzyContrDocument8 pagesSung2011 Article RobustObserver-basedFuzzyContrMohammed BenNo ratings yet
- Asymptotic Stable Tracking For Robot Manipulators Via Sectorial Fuzzy ControlDocument6 pagesAsymptotic Stable Tracking For Robot Manipulators Via Sectorial Fuzzy ControlAraceli CastruitaNo ratings yet
- w02 NeuralNetworks PDFDocument5 pagesw02 NeuralNetworks PDFMedi Hermanto TinambunanNo ratings yet
- Speed Control of A DC Motor Using BP Neural Networks: Zilong Liu Xianyi Zhuang Shuyi WangDocument4 pagesSpeed Control of A DC Motor Using BP Neural Networks: Zilong Liu Xianyi Zhuang Shuyi WangAnonymous hJbJ6TGGLNo ratings yet
- Dynamical Equations For Optimal Nonlinear Filtering: DX F (X, T) DT + W2 (X, T) DZDocument12 pagesDynamical Equations For Optimal Nonlinear Filtering: DX F (X, T) DT + W2 (X, T) DZhenrydclNo ratings yet
- Optimization Study of Fuzzy Parametric Uncertain SystemDocument12 pagesOptimization Study of Fuzzy Parametric Uncertain SystemIAES IJAINo ratings yet
- Flatness and Motion Planning: The Car With: N TrailersDocument6 pagesFlatness and Motion Planning: The Car With: N TrailersgeneralgrievousNo ratings yet
- Fuzzy Logic Control System Stability Analysis Based On Lyapunov's Direct MethodDocument12 pagesFuzzy Logic Control System Stability Analysis Based On Lyapunov's Direct Methodvirus101No ratings yet
- Dynamic Estimation and Control of Power Systems-166-169Document4 pagesDynamic Estimation and Control of Power Systems-166-169m rifqiNo ratings yet
- An Inversion Algorithm For A Banded MatrixDocument12 pagesAn Inversion Algorithm For A Banded MatrixMauricio Rojas ValdiviaNo ratings yet
- Robust Linear ParameterDocument6 pagesRobust Linear ParametervinaycltNo ratings yet
- Design of PID Controller With Incomplete Derivation Based On Ant System AlgorithmDocument7 pagesDesign of PID Controller With Incomplete Derivation Based On Ant System AlgorithmNa ChNo ratings yet
- Remarks On Input To State StabilizationDocument6 pagesRemarks On Input To State Stabilizationsysbio10No ratings yet
- On The Application of Multi-Parameter Extremum Seeking ControlDocument5 pagesOn The Application of Multi-Parameter Extremum Seeking ControlJoseph JoseNo ratings yet
- Adaptive Power System Stabilizer Using ANFIS and Genetic AlgorithmsDocument6 pagesAdaptive Power System Stabilizer Using ANFIS and Genetic AlgorithmsSimiso MathonsiNo ratings yet
- s14 CompletareDocument14 pagess14 CompletareLaura NicoletaNo ratings yet
- PID Controller Design For Multiple Time Delays System: Asma Karoui, Rihem Farkh, Moufida KsouriDocument7 pagesPID Controller Design For Multiple Time Delays System: Asma Karoui, Rihem Farkh, Moufida KsouriNagulapati KiranNo ratings yet
- 400 Bad Request 400 Bad Request Nginx/1.2.9Document5 pages400 Bad Request 400 Bad Request Nginx/1.2.9Shobeir TabasiNo ratings yet
- An ANFIS Based Fuzzy Synthesis Judgment For Transformer Fault DiagnosisDocument10 pagesAn ANFIS Based Fuzzy Synthesis Judgment For Transformer Fault DiagnosisDanh Bui CongNo ratings yet
- Kohonen 82Document11 pagesKohonen 82Thoi Ke No DiNo ratings yet
- Analogue Realizations of Fractional-Order ControllersDocument16 pagesAnalogue Realizations of Fractional-Order Controllerstarunag72801No ratings yet
- Control DC ServoDocument6 pagesControl DC Servopham hoang quanNo ratings yet
- Design Strategies For Iterative Learning Control Based On Optimal ControlDocument8 pagesDesign Strategies For Iterative Learning Control Based On Optimal Controlsaadi0No ratings yet
- Parametric Enhancement State-Dependent Riccati Equation Based ControlDocument2 pagesParametric Enhancement State-Dependent Riccati Equation Based Controlsilmon125No ratings yet
- Achieving Compatible Numeral Handwriting Recognition Rate by A Simple Activation FunctionDocument9 pagesAchieving Compatible Numeral Handwriting Recognition Rate by A Simple Activation FunctionМБежуљNo ratings yet
- Approximation Solution of Fractional Partial Differential EquationsDocument8 pagesApproximation Solution of Fractional Partial Differential EquationsAdel AlmarashiNo ratings yet
- Limitations of Sensitivity Analysis For Neural NetworksDocument5 pagesLimitations of Sensitivity Analysis For Neural NetworksFahad KhanNo ratings yet
- Sliding Mode-: Modulation Control of A "Buck" ConverterDocument6 pagesSliding Mode-: Modulation Control of A "Buck" ConverterFarag AlargtNo ratings yet
- S:J Ttims 6 Ontitoi. Li (TtiinsDocument10 pagesS:J Ttims 6 Ontitoi. Li (Ttiinsmaca_1226No ratings yet
- Aob KalmannDocument25 pagesAob KalmannRaj KanoriaNo ratings yet
- Lefeber Nijmeijer 1997Document13 pagesLefeber Nijmeijer 1997Alejandra OrellanaNo ratings yet
- Luenberger ObserversDocument4 pagesLuenberger ObserversMariam YaseenNo ratings yet
- State Estimation Using Shifted Legendre Polynomials: B.M.Mohan, Senior Member IEEE Sanjeeb Kumar Kar, Student Member IEEEDocument6 pagesState Estimation Using Shifted Legendre Polynomials: B.M.Mohan, Senior Member IEEE Sanjeeb Kumar Kar, Student Member IEEErodlnf1No ratings yet
- A New ADI Technique For Two-Dimensional Parabolic Equation With An Intergral ConditionDocument12 pagesA New ADI Technique For Two-Dimensional Parabolic Equation With An Intergral ConditionquanckmNo ratings yet
- Anti-Synchronization of Hyperchaotic Wang and Hyperchaotic Li Systems With Unknown Parameters Via Adaptive ControlDocument20 pagesAnti-Synchronization of Hyperchaotic Wang and Hyperchaotic Li Systems With Unknown Parameters Via Adaptive ControlijcseitNo ratings yet
- From Classical To State-Feedback-Based Controllers: Lecture NotesDocument10 pagesFrom Classical To State-Feedback-Based Controllers: Lecture Notesomarportillo123456No ratings yet
- A New Predictor-Corrector Method For Optimal Power FlowDocument5 pagesA New Predictor-Corrector Method For Optimal Power FlowfpttmmNo ratings yet
- LQG State Feedback Control of Multi-Rate Networked Control SystemsDocument4 pagesLQG State Feedback Control of Multi-Rate Networked Control Systemspnkj232No ratings yet
- Data Science Linear RegressionDocument105 pagesData Science Linear RegressionJaime Prades KošćinaNo ratings yet
- Bacp - Module 1 - Mini ProjectDocument25 pagesBacp - Module 1 - Mini ProjectPavithra ManjakuppamNo ratings yet
- Burning Rate Propeling ChargeDocument5 pagesBurning Rate Propeling ChargeFira Putri WulandariNo ratings yet
- PPAP ChecklistDocument4 pagesPPAP ChecklistHirbod HirmandNo ratings yet
- Quay Walls DesignDocument12 pagesQuay Walls DesignAdrian Frantescu100% (1)
- Measure of Dispersion Kurtosi, SkiwnessDocument22 pagesMeasure of Dispersion Kurtosi, SkiwnessJOHN TUMWEBAZENo ratings yet
- Advanced Statistics Course SyllabusDocument7 pagesAdvanced Statistics Course SyllabusKristina PabloNo ratings yet
- Pressure Vessels Lectures 84Document1 pagePressure Vessels Lectures 84Adeel NizamiNo ratings yet
- Rotor Flux Estimation Using Voltage Model of Induction MotorDocument5 pagesRotor Flux Estimation Using Voltage Model of Induction MotorBobby RinaldiNo ratings yet
- Solving Word Problems Involving Exponential FunctionsDocument15 pagesSolving Word Problems Involving Exponential FunctionsSherwin Jay Bentazar100% (1)
- OOPM Theory QuestionsDocument7 pagesOOPM Theory Questionssheenam_bhatiaNo ratings yet
- Strouhal ADocument8 pagesStrouhal Asivaaero41No ratings yet
- Modelacion Calida Agua Parte 1Document14 pagesModelacion Calida Agua Parte 1Gisell AguilarNo ratings yet
- Haytham Ibrahim's Assignment No.2 PDFDocument29 pagesHaytham Ibrahim's Assignment No.2 PDFAhmed KhairiNo ratings yet
- Small Satellite Thermal Design, Test and AnalysisDocument12 pagesSmall Satellite Thermal Design, Test and AnalysisMihaela NastaseNo ratings yet
- TSB 89 ADocument29 pagesTSB 89 AŽarko MočnikNo ratings yet
- Geh 6676 Power System Stabilizer For EX2100 Excitation ControlDocument48 pagesGeh 6676 Power System Stabilizer For EX2100 Excitation ControlSupolNo ratings yet
- CE 14 Course SyllabusDocument2 pagesCE 14 Course SyllabusChristian GalopeNo ratings yet
- Standard Test Methods For Fire Tests of Building Construction and Materials E 119 - 07Document22 pagesStandard Test Methods For Fire Tests of Building Construction and Materials E 119 - 07Frenzy BritoNo ratings yet
- GPS Constellation Toolbox Manual-Version70Document131 pagesGPS Constellation Toolbox Manual-Version70bdkim90No ratings yet
- Syllabus Jan09 MAT183Document2 pagesSyllabus Jan09 MAT183Mike ZakwanNo ratings yet
- The Mechanism of Activated Digusion Through Silica GlassDocument9 pagesThe Mechanism of Activated Digusion Through Silica GlassElenaNo ratings yet
- Chapter 1 Assignment What Is Statistics?Document2 pagesChapter 1 Assignment What Is Statistics?mimoNo ratings yet
- Calculus PDF Notes 156pages59Document13 pagesCalculus PDF Notes 156pages59Pardeep Singh100% (1)
- Solved Multiple Choice Questions of DataDocument40 pagesSolved Multiple Choice Questions of Datamini projectNo ratings yet
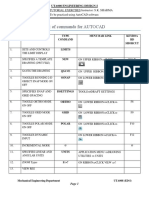
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocument15 pagesList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelNo ratings yet
- Tutorial Letter 001/3/2021: Complex AnalysisDocument19 pagesTutorial Letter 001/3/2021: Complex AnalysisKyle MaharajNo ratings yet
- Computer Science For The Masses: Robert Sedgewick Princeton UniversityDocument50 pagesComputer Science For The Masses: Robert Sedgewick Princeton University김형진No ratings yet
- Discuss The Concept of Semantics and Elaborate NameDocument4 pagesDiscuss The Concept of Semantics and Elaborate NameAnonymous R99uDjYNo ratings yet
- Tax Evasion PDFDocument34 pagesTax Evasion PDFCristinaZLNo ratings yet