You might also like
- Toyota Fortuner BrochureDocument14 pagesToyota Fortuner BrochurerajeshpavanNo ratings yet
- Directions for Parts Catalogue UseDocument575 pagesDirections for Parts Catalogue UseВячеслав ШапочкаNo ratings yet
- Sumo RobotDocument15 pagesSumo Robotapi-236648421No ratings yet
- Track Rubber Parts Listing for Model 334Document2 pagesTrack Rubber Parts Listing for Model 334javier muñozNo ratings yet
- Topic 8.1 - Energy SourcesDocument92 pagesTopic 8.1 - Energy SourcesAnshulNo ratings yet
- Screw Compressor Parts CatalogDocument4 pagesScrew Compressor Parts CatalogAkmalNo ratings yet
- M0125763en-Us 313D2LGP LKRDocument509 pagesM0125763en-Us 313D2LGP LKRDedy setiawan100% (1)
- Каталог Shantui Sd16f EngDocument312 pagesКаталог Shantui Sd16f EngMax SashikhinNo ratings yet
- eng-GB20036078B HDocument340 pageseng-GB20036078B Hvictor villarroelNo ratings yet
- XCMG LW300K PDFDocument2 pagesXCMG LW300K PDFjonathan tbgNo ratings yet
- Parts and More Catalogue 2017 - WG - Brochure - PaM2017 - 1016 - ENDocument45 pagesParts and More Catalogue 2017 - WG - Brochure - PaM2017 - 1016 - ENKhiem DinhNo ratings yet
- HD785-7 Elec Schematic SEN05900-01Document12 pagesHD785-7 Elec Schematic SEN05900-01ISRAEL GONZALESNo ratings yet
- Toxic Gas DetectorDocument6 pagesToxic Gas DetectorKvakumarv Vallatharasu100% (1)
- Illustrated Parts Manual for 600S, 600SJ and 660SJ MachinesDocument352 pagesIllustrated Parts Manual for 600S, 600SJ and 660SJ MachinesCarlos Araque0% (1)
- ZX110 - 135TO - Technical Manual (Operational Principle)Document307 pagesZX110 - 135TO - Technical Manual (Operational Principle)Kike MesaNo ratings yet
- Operator'S Manual and Spare Parts Catalogue Schaeff ItcDocument31 pagesOperator'S Manual and Spare Parts Catalogue Schaeff ItcJesus VergaraNo ratings yet
- DGUS Development Guide V3.4.0Document90 pagesDGUS Development Guide V3.4.0Gandy Torres TorresNo ratings yet
- Body Mounting Manual: KK-GH214Document264 pagesBody Mounting Manual: KK-GH214locario1No ratings yet
- Liebherr SR 712 B Litronic Operating ManualDocument204 pagesLiebherr SR 712 B Litronic Operating ManualAlain DefoeNo ratings yet
- C Q C 4 User's Manual: Ummins Uick HeckDocument33 pagesC Q C 4 User's Manual: Ummins Uick HeckKrishna PardeshiNo ratings yet
- BW213-4 4pgDocument4 pagesBW213-4 4pgtokotani torajaNo ratings yet
- BAVARIA SR36 - SalesManualDocument55 pagesBAVARIA SR36 - SalesManualbauplNo ratings yet
- Cat To-4Document65 pagesCat To-4srcattozziNo ratings yet
- I-Lock CT2 Coupler BrochureDocument2 pagesI-Lock CT2 Coupler BrochureW MoralesNo ratings yet
- 3 Way Dump TruckDocument15 pages3 Way Dump TruckPradeep GsNo ratings yet
- South S86: Integrated RTK GNSS Surveying SystemDocument2 pagesSouth S86: Integrated RTK GNSS Surveying SystemRobson AquinoNo ratings yet
- Toyota: Presented by Gitesh Gajbhiye Amit Patidar Nilesh Jadhao Vicky Mohd. Shakil Lakhan SharmaDocument27 pagesToyota: Presented by Gitesh Gajbhiye Amit Patidar Nilesh Jadhao Vicky Mohd. Shakil Lakhan SharmaMohd Shakil PathanNo ratings yet
- Cat Dcs Sis ControllerDocument4 pagesCat Dcs Sis ControllerJefMorenoNo ratings yet
- Wiring Diagram: Volvo Xc90Document238 pagesWiring Diagram: Volvo Xc90Mohamed amashaNo ratings yet
- PC27MR-2 M Ten00115-00 PDFDocument261 pagesPC27MR-2 M Ten00115-00 PDFskywokerNo ratings yet
- Panasonic kx-ft982ls 984ls 988ls SM PDFDocument194 pagesPanasonic kx-ft982ls 984ls 988ls SM PDFSalam MohammedNo ratings yet
- Xilinx System Generator For DSP User GuideDocument424 pagesXilinx System Generator For DSP User Guidedegdoug100% (1)
- 46-200 PlatraformaDocument112 pages46-200 PlatraformaChristianNo ratings yet
- Propeller ShaftDocument2 pagesPropeller ShaftmanualNo ratings yet
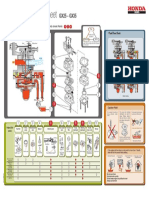
- Despiece y Funciomamiento Carburador Honda gx25 gx35 Ingles PDFDocument1 pageDespiece y Funciomamiento Carburador Honda gx25 gx35 Ingles PDFkexavadasNo ratings yet
- 2015 Hino 195 Class 5 SpecificationsDocument2 pages2015 Hino 195 Class 5 SpecificationsVictor MolinaNo ratings yet
- Trucks - Trailers & Buses - 2016Document644 pagesTrucks - Trailers & Buses - 2016Ivf ValentinaNo ratings yet
- Pc128us-2 Aess499-05 Ev3Document12 pagesPc128us-2 Aess499-05 Ev3LU YO100% (1)
- Al-Ko Overrun Hitches - CatálogoDocument51 pagesAl-Ko Overrun Hitches - CatálogoGabrielNunesNo ratings yet
- Cat426a PDFDocument90 pagesCat426a PDFJuan PenasNo ratings yet
- Kundendokumentation enDocument309 pagesKundendokumentation enHarri Mündel100% (1)
- TRIMA Front End Loadres & ImplementsDocument32 pagesTRIMA Front End Loadres & ImplementsMamta RaybageNo ratings yet
- Realistic Car Controller V3.3Document37 pagesRealistic Car Controller V3.3Jefferson AlbuquerqueNo ratings yet
- Technical specifications and dimensions of BOMAG single drum rollersDocument4 pagesTechnical specifications and dimensions of BOMAG single drum rollersJeffreyNo ratings yet
- Faldic-β User s ManualDocument252 pagesFaldic-β User s Manual이태규0% (1)
- Detroitdiesel MHDD A2900174 7d7-5d1 0d20-0d01Document3 pagesDetroitdiesel MHDD A2900174 7d7-5d1 0d20-0d01Erick RodriguesNo ratings yet
- For U Sheet Piles: 400mm WideDocument5 pagesFor U Sheet Piles: 400mm Widelucas100% (1)
- CanRail - User Guide v1.1Document51 pagesCanRail - User Guide v1.1Alex GeorgeNo ratings yet
- Mitsubishi 2010 Fuso FG Owner's ManualDocument370 pagesMitsubishi 2010 Fuso FG Owner's ManualCamilo AvellanedaNo ratings yet
- HL-1110-1111-1112-1118 Catalogo de PartesDocument23 pagesHL-1110-1111-1112-1118 Catalogo de PartesdonpnchojrNo ratings yet
- Automatic Transmission Unit (1Hd Fte) : ComponentsDocument1 pageAutomatic Transmission Unit (1Hd Fte) : Componentsjoe nathanNo ratings yet
- SATA Master Catalogue-2014 PDFDocument83 pagesSATA Master Catalogue-2014 PDFLutfi ArdiansyahNo ratings yet
- Electrical Features and Specifications GuideDocument6 pagesElectrical Features and Specifications GuideEdison F Rojas SalinasNo ratings yet
- Visa R50/R100Document118 pagesVisa R50/R100vuksa2103No ratings yet
- FPT F4DFE613M U-R-015-0290Document3 pagesFPT F4DFE613M U-R-015-0290Goran MatovicNo ratings yet
- Alternator Parts List & Specs for Denso 320 ModelDocument15 pagesAlternator Parts List & Specs for Denso 320 ModelJustin FoleyNo ratings yet
- MPC5777CRMADDocument117 pagesMPC5777CRMADblasterx1098No ratings yet
- Illustrated Parts Manual: Model 1250AJPDocument406 pagesIllustrated Parts Manual: Model 1250AJPalban ericNo ratings yet
- Large Format Systems Connectivity Information For Windows Environment Administration Guide ENDocument232 pagesLarge Format Systems Connectivity Information For Windows Environment Administration Guide ENpirat_eye100% (1)
- Product Information AC-S1 V1.0Document2 pagesProduct Information AC-S1 V1.0Paul CholewaNo ratings yet
- Ric Holland Creative ShowcaseDocument3 pagesRic Holland Creative ShowcaseRic HollandNo ratings yet
- Ultra3000 Digital Servo Drive With DeviceNetDocument124 pagesUltra3000 Digital Servo Drive With DeviceNetHarish PadmanabanNo ratings yet
- OpenScape 4000 V7, VHG 3500 HFA For OpenScape 4000 SoftGate, Administrator Documentation, Issue 2 PDFDocument56 pagesOpenScape 4000 V7, VHG 3500 HFA For OpenScape 4000 SoftGate, Administrator Documentation, Issue 2 PDFChris ThianNo ratings yet
- University Physics II - Thermodynamics, Electricity, MagnetismDocument924 pagesUniversity Physics II - Thermodynamics, Electricity, MagnetismFeiFei SunNo ratings yet
- Vts Capacity ProfileDocument18 pagesVts Capacity ProfilevudinhnambrNo ratings yet
- Stopping Sight DistanceDocument28 pagesStopping Sight DistanceEman MousaNo ratings yet
- Muhammad Imran YousufDocument1 pageMuhammad Imran YousufMuhammad Irfan YousufNo ratings yet
- Determine COP of a Heat Pump/Refrigeration MachineDocument2 pagesDetermine COP of a Heat Pump/Refrigeration MachineJeremy Tay0% (2)
- Polarization Index TestDocument3 pagesPolarization Index TestShahriar AhmedNo ratings yet
- Preparation, Structure and Morphology of Polymer Supports: David C. SherringtonDocument12 pagesPreparation, Structure and Morphology of Polymer Supports: David C. Sherringtonkishorkumarn8212No ratings yet
- Wave OpticsDocument1 pageWave OpticsBhupeshNo ratings yet
- ACI - Measurement of Properties of Fiber Reinforced ConcreteDocument12 pagesACI - Measurement of Properties of Fiber Reinforced ConcreteTran Tuan Kiet100% (1)
- Reality in A Metaphysical ModelDocument17 pagesReality in A Metaphysical ModelLecks90No ratings yet
- CDI Spark 2530 Datasheet En-PDocument2 pagesCDI Spark 2530 Datasheet En-PKristianto Mathers IIINo ratings yet
- HW1 - Conditions - Olevsky - Mech - Beh - Mater PDFDocument2 pagesHW1 - Conditions - Olevsky - Mech - Beh - Mater PDFwangbutt123No ratings yet
- Nioec SP 00 89 (R0) (Ed1)Document8 pagesNioec SP 00 89 (R0) (Ed1)aminNo ratings yet
- 20220606-03 Bombilla de Referencia - Prueba #1 - Después Del ADocument11 pages20220606-03 Bombilla de Referencia - Prueba #1 - Después Del Ajesus sanchezNo ratings yet
- Neuber Plasticity Correction R&O Material CurveUR2202Document1 pageNeuber Plasticity Correction R&O Material CurveUR2202Eduardo Javier Granados SanchezNo ratings yet
- Titrimetry (anEm'pnmQwQy)Document102 pagesTitrimetry (anEm'pnmQwQy)AchindA FernandoNo ratings yet
- 3 Basic Electrical EngineeringDocument4 pages3 Basic Electrical EngineeringJyothsna VayyalaNo ratings yet
- Aceros PoscoDocument35 pagesAceros PoscoregistrosegNo ratings yet
- Alat Ukur Ketebalan Besi - Jual Ultrasonick Thickness Gauge Mitech MT 180 0812 9595 8196Document2 pagesAlat Ukur Ketebalan Besi - Jual Ultrasonick Thickness Gauge Mitech MT 180 0812 9595 8196Regi EgiNo ratings yet
- Lecture Notes On Mathematical Methods PH2130 - 2012/2013: Glen D. Cowan Physics DepartmentDocument8 pagesLecture Notes On Mathematical Methods PH2130 - 2012/2013: Glen D. Cowan Physics DepartmentbbteenagerNo ratings yet
- Electrostatic ForceDocument3 pagesElectrostatic ForceAlyssa Cole100% (1)
- TM-16 Well Test and Completion DetailsDocument32 pagesTM-16 Well Test and Completion DetailsKiki AmrullahNo ratings yet
- Magma (Computer Algebra System) - Wikipedia, The Free EncyclopediaDocument3 pagesMagma (Computer Algebra System) - Wikipedia, The Free Encyclopediabeta2009No ratings yet
- Duhem The Aim and Structure of Physical Theory Part II CH 6 PDFDocument24 pagesDuhem The Aim and Structure of Physical Theory Part II CH 6 PDFxompistasNo ratings yet
- B D Khosla Practical ChemistryDocument6 pagesB D Khosla Practical ChemistryJaswinder Sidhu18% (11)
- Design and Analysis of Single Plate Friction ClutchDocument29 pagesDesign and Analysis of Single Plate Friction ClutchSagar BhoiteNo ratings yet
- Physics Report Total Internal Reflection - EditedDocument10 pagesPhysics Report Total Internal Reflection - EditedJASMSJS SkskdjNo ratings yet