You might also like
- Trivium 3781 7 L Idealtype Weberien de La Bureaucratie Et La Sociologie Des OrganisationsDocument10 pagesTrivium 3781 7 L Idealtype Weberien de La Bureaucratie Et La Sociologie Des Organisationsramondz1No ratings yet
- DexamethasomeDocument6 pagesDexamethasomeramondz1No ratings yet
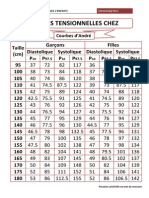
- HTA Tableau D - AndréDocument1 pageHTA Tableau D - Andréramondz1No ratings yet
- Pratique de La Regression Logistique 2013 Cle4fb714Document20 pagesPratique de La Regression Logistique 2013 Cle4fb714ramondz1No ratings yet
- TD 2Document1 pageTD 2ramondz1No ratings yet
- Exercices FlotsDocument2 pagesExercices Flotsramondz1No ratings yet
- DocDocument26 pagesDocramondz1No ratings yet
- Corrige 2Document4 pagesCorrige 2ramondz150% (2)
- Tp5 SolutionsDocument3 pagesTp5 Solutionsramondz1No ratings yet
- Ex Sol ReDocument3 pagesEx Sol Reramondz1No ratings yet
- ECONOMIEDocument17 pagesECONOMIEAdel HidouriNo ratings yet
- Normalisation Dans La Navigation AérienneDocument1 pageNormalisation Dans La Navigation Aérienneramondz1No ratings yet
- MOSISP Chap4Document9 pagesMOSISP Chap4ramondz1No ratings yet
- 1 s2.0 S0929693X08719894 MainDocument1 page1 s2.0 S0929693X08719894 Mainramondz1No ratings yet
- TD 2Document1 pageTD 2ramondz1No ratings yet
- Exercice n3Document2 pagesExercice n3ramondz1No ratings yet
- 435-441 - AlaouiDocument7 pages435-441 - Alaouiramondz1No ratings yet
- Plan CommDocument20 pagesPlan Commramondz1No ratings yet
- Emploi Du TempsDocument2 pagesEmploi Du Tempsramondz1No ratings yet
- Corrige Exos ChaleurDocument22 pagesCorrige Exos ChaleurMohamud LhafNo ratings yet
- DexamethasomeDocument6 pagesDexamethasomeramondz1No ratings yet
- Fiche Connaissance de L'entrepriseDocument10 pagesFiche Connaissance de L'entrepriseramondz1No ratings yet
- Exo Graphes Sopena ToutDocument32 pagesExo Graphes Sopena ToutSelt RachidNo ratings yet
- A C P PDFDocument37 pagesA C P PDFAboubakar NambiemaNo ratings yet
- ACP 40 Voitures-2005Document21 pagesACP 40 Voitures-2005ramondz1No ratings yet
- Analyse Des Correspondances Multiples-2012-2 Cle838d4fDocument33 pagesAnalyse Des Correspondances Multiples-2012-2 Cle838d4framondz1100% (1)
- TD5 s2Document2 pagesTD5 s2ramondz1No ratings yet
- Integration CalculenoDocument3 pagesIntegration Calculenoramondz1No ratings yet
- CH JordanDocument22 pagesCH Jordandaniel moneyNo ratings yet
- Les Sujets Et Corriges Concours Ise Option MathsDocument35 pagesLes Sujets Et Corriges Concours Ise Option MathsChrist-Phanuel DAGBO100% (9)
- M1py3w11 Exercices 2014-15Document21 pagesM1py3w11 Exercices 2014-15koyabeNo ratings yet
- Ennoncé Serie1Document4 pagesEnnoncé Serie1rached11100% (1)
- 12 - Exercices - Isometries Et Endomorphismes Symetriques Des Espaces EuclidiensDocument3 pages12 - Exercices - Isometries Et Endomorphismes Symetriques Des Espaces EuclidiensValentin ZahoundoNo ratings yet
- EDO EDP m1-td1-2020Document4 pagesEDO EDP m1-td1-2020Marc TentiNo ratings yet
- Prog Maths MPDocument47 pagesProg Maths MPAnass ÉsslimaniNo ratings yet
- CCP 2007 MP M2 Corrige PDFDocument5 pagesCCP 2007 MP M2 Corrige PDFZouhair NajarNo ratings yet
- CNC 1990 MP Maths 2 CorrigeDocument7 pagesCNC 1990 MP Maths 2 Corrigefbaraket48No ratings yet
- Mathematiques Exercices Incontournables (MP) by J.Freslon, S.Gugger, D.Fredon, J.Poineau, C.Morin PDFDocument351 pagesMathematiques Exercices Incontournables (MP) by J.Freslon, S.Gugger, D.Fredon, J.Poineau, C.Morin PDFfbhke100% (1)
- Exercice Reduction Des EndomorphismesDocument22 pagesExercice Reduction Des Endomorphismesapi-3842942100% (10)
- Commandabilité ObservabiltéDocument18 pagesCommandabilité ObservabiltéHamza DarrarNo ratings yet
- TD - Diagonalisation Des MatricesDocument2 pagesTD - Diagonalisation Des MatricesSirineNo ratings yet
- Tpe Algebre 4Document35 pagesTpe Algebre 4Zorbs RolandNo ratings yet
- Slides Cours10 LU2ME003 2020Document39 pagesSlides Cours10 LU2ME003 2020jean pierreNo ratings yet
- Cours OptimisationDocument43 pagesCours OptimisationAnas Abouyahya100% (1)
- Alg 2 TD 6Document2 pagesAlg 2 TD 6HoussamNo ratings yet
- ING 3 Analyses Des DonnéesDocument44 pagesING 3 Analyses Des DonnéesEleanor ShellstropNo ratings yet
- Décomposition de Dunford: Leçons: 153 157Document4 pagesDécomposition de Dunford: Leçons: 153 157Screny-Sthon De la VégaNo ratings yet
- Sujet 17 BDocument4 pagesSujet 17 BhakkayNo ratings yet
- REDUC13Document21 pagesREDUC13anas naboussiNo ratings yet
- Correction D'examen D' Algèbre 4 Session D'automne 2014-2015Document7 pagesCorrection D'examen D' Algèbre 4 Session D'automne 2014-2015rachid50% (2)
- Examenalgebre 3Document5 pagesExamenalgebre 3Lerrys ObiangNo ratings yet
- Analyse Num 12-13Document72 pagesAnalyse Num 12-13Mohamed Tayeb MekkiNo ratings yet
- Ch02 ReductionDocument13 pagesCh02 ReductionMohamed AzzamNo ratings yet
- Luca Amodei, Jean-Pierre Dedieu - Analyse Numérique Matricielle - Cours Et Exercices Corrigés-Dunod (2008) PDFDocument328 pagesLuca Amodei, Jean-Pierre Dedieu - Analyse Numérique Matricielle - Cours Et Exercices Corrigés-Dunod (2008) PDFEL Mahdi Al100% (3)
- ECRICOME 2006 ConcoursDocument5 pagesECRICOME 2006 Concoursbeebac2009No ratings yet
- 6 TD Algebre Du 4-11-11 (Partie2)Document5 pages6 TD Algebre Du 4-11-11 (Partie2)maabosoNo ratings yet
- Laude Maths II PDFDocument2 pagesLaude Maths II PDFEPEBISSA LaudeNo ratings yet
- Reduction de Jordan Correction 14-15Document21 pagesReduction de Jordan Correction 14-15ray LintonNo ratings yet