You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Major and Minor TriadsDocument16 pagesMajor and Minor TriadsSAYINo ratings yet
- August 30-Filling Out FormsDocument3 pagesAugust 30-Filling Out FormsJocelyn G. EmpinadoNo ratings yet
- 2014 Rondy GuideDocument60 pages2014 Rondy GuideJeffrey RivetNo ratings yet
- Quiz 14Document2 pagesQuiz 14warning urgentNo ratings yet
- (Myers79) (Hetzel88)Document43 pages(Myers79) (Hetzel88)Infomailbox10No ratings yet
- Hyperbolic FunctionsDocument11 pagesHyperbolic FunctionsShiraz NajatNo ratings yet
- ReadingDocument3 pagesReadingMuhamad IbrohimNo ratings yet
- ch10 ClickerDocument22 pagesch10 ClickerElijah Fren LubianoNo ratings yet
- Sys-Am-14 Designing An 'Iaq Ready' Air Handler SystemDocument71 pagesSys-Am-14 Designing An 'Iaq Ready' Air Handler SystemtpqnhatNo ratings yet
- Project Wifi CrakDocument12 pagesProject Wifi CrakZain ButtNo ratings yet
- DR Draw Users Guide 0384Document224 pagesDR Draw Users Guide 0384gottes villainNo ratings yet
- Tomorrow Is WaitingDocument8 pagesTomorrow Is WaitingsrplsmskNo ratings yet
- 8993060532-6991517762a Rod Handling System For CT20: Spare Parts ListDocument164 pages8993060532-6991517762a Rod Handling System For CT20: Spare Parts ListErick Ticona FalconNo ratings yet
- Lecture 06 - Types of Permanent Mold Casting ProcessesDocument26 pagesLecture 06 - Types of Permanent Mold Casting ProcessesThe NoobNo ratings yet
- Product PolyolDocument1 pageProduct PolyolAgung SiswahyuNo ratings yet
- SikaWrap®-900 CDocument4 pagesSikaWrap®-900 CN.J. PatelNo ratings yet
- The Rise of Robot Friendship: Ethical Dilemmas in Science and TechnologyDocument10 pagesThe Rise of Robot Friendship: Ethical Dilemmas in Science and TechnologyStephen VillegasNo ratings yet
- Full Download Test Bank For Chemistry Principles and Reactions 8th Edition by Masterton PDF Full ChapterDocument34 pagesFull Download Test Bank For Chemistry Principles and Reactions 8th Edition by Masterton PDF Full Chapteryen.resiege.ffrq100% (15)
- FILIPINO 2 LEARNING PLAN 3rd QuarterDocument4 pagesFILIPINO 2 LEARNING PLAN 3rd QuarterMary Kryss DG SangleNo ratings yet
- MCT Grade 5 LANGUAGE ARTS 2017 (1)Document16 pagesMCT Grade 5 LANGUAGE ARTS 2017 (1)Boppy VevoNo ratings yet
- Hydro Corr TestDocument19 pagesHydro Corr TestPramoth NarashimmanNo ratings yet
- Mirpur University of Science and Technology (Must), Mirpur Deparment Computer Science Information TechnologyDocument19 pagesMirpur University of Science and Technology (Must), Mirpur Deparment Computer Science Information TechnologySeharNo ratings yet
- Chapter 9 - Worksheet1finalDocument27 pagesChapter 9 - Worksheet1finalTansu Erin ŞarlakNo ratings yet
- Lenovo A516 Maintenance ManualDocument40 pagesLenovo A516 Maintenance Manualpradipto87No ratings yet
- Method Statement Riyadh School Project Fire Fighting SystemDocument3 pagesMethod Statement Riyadh School Project Fire Fighting Systemkhantoseef84No ratings yet
- If ClauseDocument13 pagesIf Clausemadeleine mmdNo ratings yet
- University of Calicut: Examination ResultsDocument1 pageUniversity of Calicut: Examination ResultsArun Saji Josz RbzNo ratings yet
- Op 275Document13 pagesOp 275cvbNo ratings yet
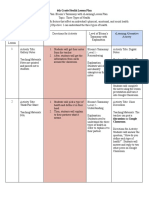
- 6th Grade Health Lesson Plan - Portfolio - BloomsDocument3 pages6th Grade Health Lesson Plan - Portfolio - Bloomsapi-475320683No ratings yet
- A Minor Project Report On ECOKART Student Racing Vehicle 2020 (ARPIT JAMES - 40215611116) (Mail2arpit2010@Gmail - Com)Document59 pagesA Minor Project Report On ECOKART Student Racing Vehicle 2020 (ARPIT JAMES - 40215611116) (Mail2arpit2010@Gmail - Com)شاہد بشیرNo ratings yet